(54) МАНИПУЛЯТОР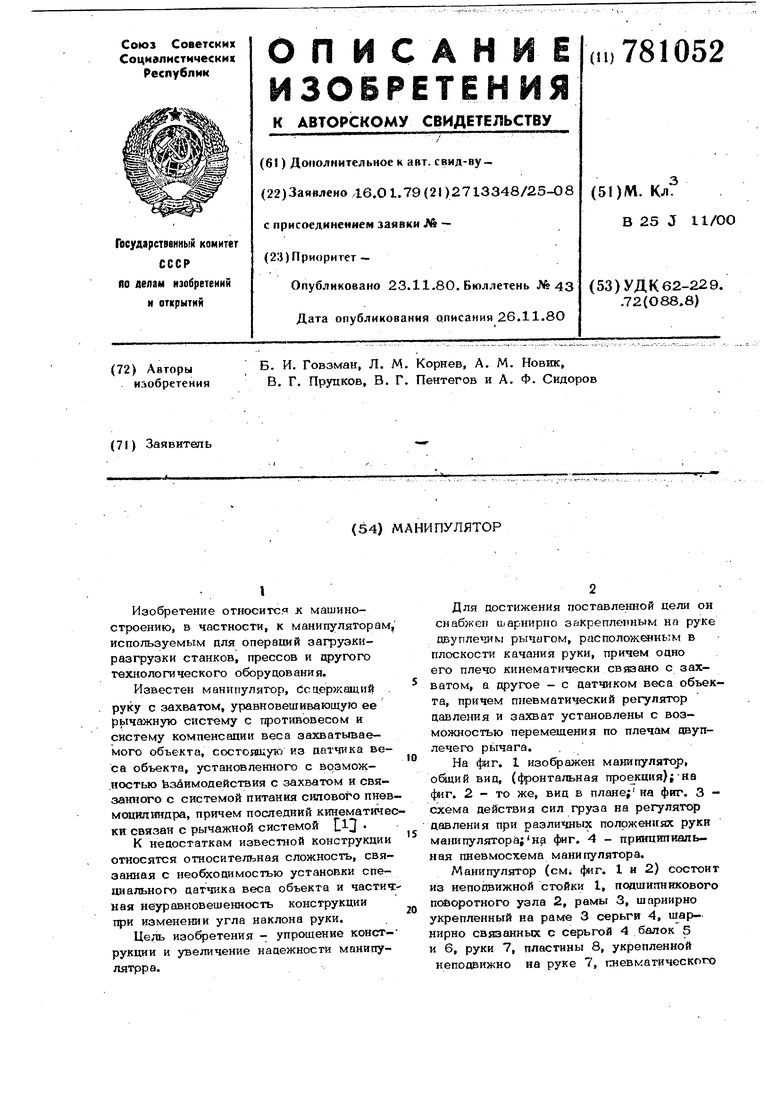
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1178584A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Манипулятор для дозированной загрузки емкости сыпучим материалом | 1985 |
|
SU1281399A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Уравновешивающее подъемное устройство | 1976 |
|
SU655639A1 |
| Устройство для установки заготовок в пресс | 1988 |
|
SU1523233A1 |
| Промышленный робот | 1985 |
|
SU1268254A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЗАХВАТНОГО УСТРОЙСТВА | 1993 |
|
RU2035292C1 |
| Абразивный отрезной станок | 1980 |
|
SU942958A2 |
| Автоматизированный технологический комплекс для изготовления изделий из пластмасс | 1983 |
|
SU1248835A1 |
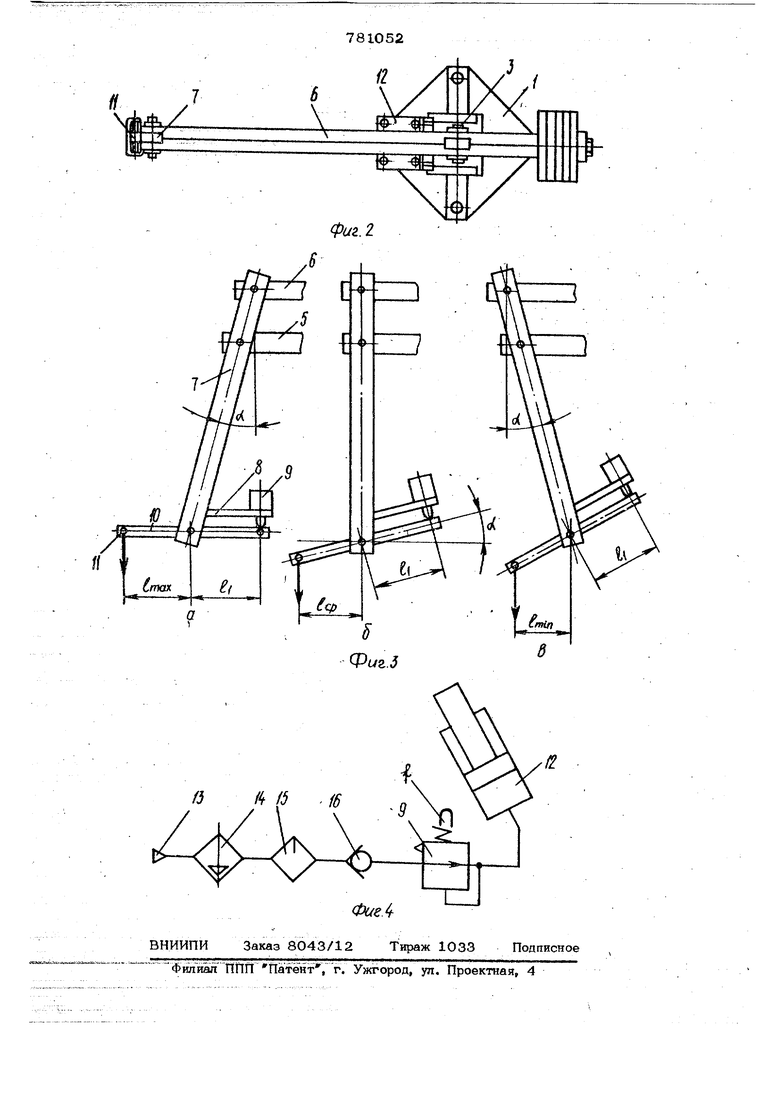
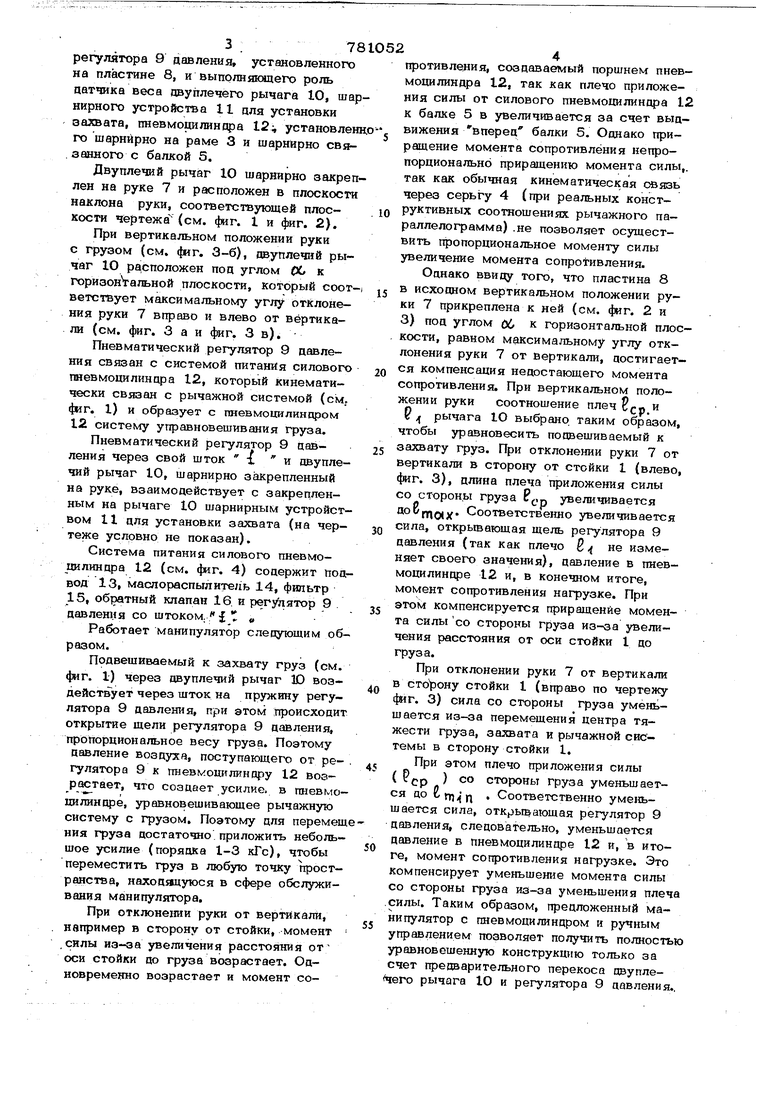
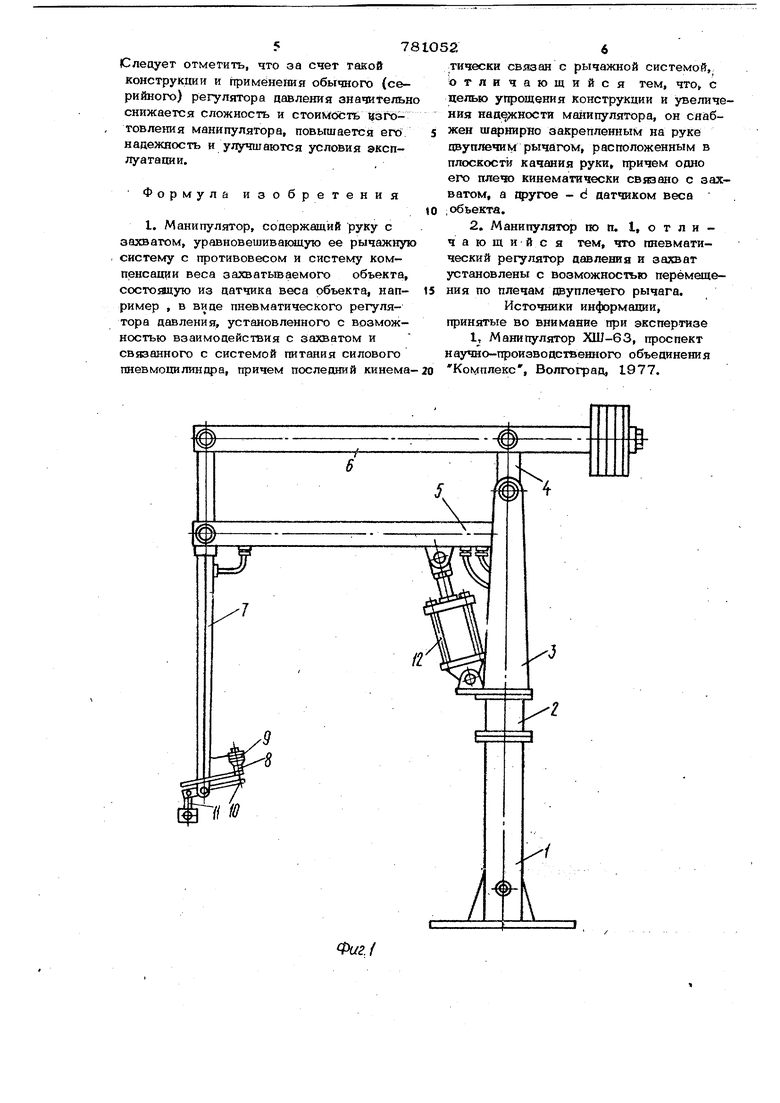
Изобретение относится к машиностроению, в частности, к манипуляторам используемым цля операций загрузкиразгрузки станков, прессов и аругого технологического оборудования. Известен манипулятор, йсцержащий руку с захватом, уравновешивающую ее рычажную систему с противовесом и систему компенсации веса захватываемого объекта, состоящую из датчика веса объекта, установленного с врзмож- .ностью Ьз имодействия с захватом и связанного с системой питания силового пнев моцилиндра, причем последний кинематиче ки связан с рычажной системой l К недостаткам известной конструкции относятся относительная сложность, связанная с необходимостью установки специального датчика веса объекта и частич ная неуравновешенность конструкции при изменении угла наклона руки. Цель изобретения - упрощение конструкции и увеличение надежности манипулятрра. Для достижения поставленной цели он снабжен шарнирно закрепленным на руке двуплечим рычагом, расположенным в плоскости качания руки, причем одно его плечо кинематически свявано с захватом, а другое - с датчиком веса объекта, причем пневматический регулятор давления и захват установлены с возможностью перемещения по плечам двуплечего рычага. На фиг. I изображен манипулятор, ойций вид, (фронтальная проекция);на 4мг. 2 - то же, вид в плане; на фиг. 3 схема действия сил груза на регулятор давления при различных положениях руки манипулятор а;нэ фкг. 4 - принципиальная пневмосхема манипулятора. Манипулятор (см фиг. I н 2) состоит из неподвижной стойки I, подшипникового псм&оротного узла 2, рамы 3, шарнирно укрепленный на раме 3 серьги 4, шарнирно связаннък с серьгой 4 балок 5 и 6, руки 7, пластины 8, укрепленной неподвижно на руке 7, пневматического 378 регулятора 9 давления, установленногх) на пластине 8, и выполняквдего роль датчика веса двуплечего рычага 10, шар нирного устройства 11 для установки захвата, пневмоцилиндра 12 установлен го шарнйрно на раме 3 и шарнйрно связанного с балкой 5. Двуплечий рычаг 10 шарнйрно закреп лен на руке 7 и расположен в плоскости наклона руки, соответствующей плоскости чертежа (см. фиг. 1 и фиг. 2). При вертикальном положении руки с грузом (см. фиг. З-б), двуплечий рычаг 1О расположен под углом (5С к горизонУальной плоскости, который COOT ветствует максимальному углу отЛлонения руки 7 вправо и влево от вертикали (см. фиг. 3 а и 4иг. 3 в). Пневматический регулятор 9 давления связан с системой питания силового пневмоцилиндра 12, который кинематически с рычажной системой (см, фиг. 1) и образует с пневмоцилиндром 12 систему управновешивания груза. Пневматический регулятор 9 Давления через свой шток и двуплечий рычаг 10, шарнйрно закрепленный на руке, взаимодействует с закрепленным на рычаге 10 шарнирным устройством 11 для установки захвата (на чертеже условно не показан). Система питания силового пневмо- цилиндра 12 (см. фиг. 4) содержит под вод 13, маслораспылитель 14, фильтр 15, обратный клапан 16 и рег/лятор 9 давления со штоком. ft Работает манипулятор следующим образом. Подвешиваемый к захвату груз (см. фиг. 1) через двуплечий рычаг Ю воздействует через шток на пружину регулятора 9 давления, при этом ;происходит открытие щели регулятора 9 давления, пропорциональное весу груза. Поэтому давление воздуха, поступающего от регулятора 9 к пневмоцилиндру 12 возрастает, что создает усилие, в пневмо цилиндре, уравновешивающее рычажную систему с грузом. Поэтому для перемещ ния груза достаточно приложить небольшое усилие (порядка 1-3 кГс), чтобы переместить груз в любую точку пространства, наход5«цуюся в сфере обслуживания манипулятора. При отклонении руки от вертикали, например в сторону от стойки, момент силы из-за увеличения расстояния от; оси стойки до груза возрастает. Одновременно возрастает и момент сопротивления, создаваемый поршнем пневмоцилиндра 12, так как плечо приложения силы от силового пневмоцилиндра 12 к балке 5 в увеличивается за счет выдвижения вперед балки 5. Однако приращение момента сопротивления непропорционально приращению момента силы,, так как обычная кинематическая связь через серьгу 4 (при реальных конструктивных соотношениях рычажного параллелограмма) .не позволяет осуществить пропорциональное моменту силы увеличение момента сопротивления. Однако ввиду того, что пластина 8 в исходном вертикальном положении руки 7 прикреплена к ней (см. фиг. 2 и 3) под углом об к горизонтальной плоскости, равном максимальному углу отклонения руки 7 от вертикали, достигается компенсация недостающего момента сопротивления. При вертикальном положении руки соотношение плеч ср Р рычага 1О выбрано таким образом, чтобы уравновесить подвешиваемый к захвату груз. При отклонении руки 7 от вертикали в сторону от стойки 1 (влево, фиг. 3), длина плеча приложения силы со сторон.ы груза Р. увеличивается ,у. Соответственно увеличивается сила, открьгоающая щель регулятора 9 давления (так как плечо 6 не изменяет своего значения), давление в пневмоцилиндре 12 и, в конечном итоге, момент сопротивления нагрузке. При этом компенсируется приращение момента силы со стороны груза из-за увеличения расстояния от оси стойки 1 до груза. При отклонении руки 7 от вертикали в сторону стойки I (вправо по чертежу 4иг. 3) сила со стороны груза уменьшается из-за перемещения центра тяжести груза, захвата и рычажной системы в сторону стойки 1. При этом плечо приложения силы ( рр ) со стороны груза уменьшается цо nj/jn Соответственно уменьшается сила, открывающая регулятор 9 давления, следовательно, уменьшается давление в пневмоцилиндре 12 и, в итоге, момент сопротивления нагрузке. Это компенсирует уменьшение момента силы со стороны груза из-за уменьшения плеча .силы. Таким образом, предложенный манипулятор с пневмоцилиндром и ручным управлением позволяет получить полностью уравновешенную конструкцию только за счет предвари те .пьно го перекоса двупле чего рычага 10 и регулятора 9 давления.,
Слеаует отметить, что за счет такой конструкции и применения обычного (серийного) регулятора давления значительно снижается сложность и стоимость изготовления манипулятора, повышается его надежность и улучшаются условия эксплуатации.
Формула изобретения
I. Манипулятор, содержащий руку с захватом, уравновешивакнцую ее рычажную систему с противовесом и систему компенсации веса захватьюаемого объекта, состоящую из датчика веса объекта, например , в вице пневматического регулятора давления, установленного с возможностью взаимодействия с захватом и связанного с системой питания силового пневмоцилиндра, причем последний кинематически связан с рычажной системой,, отличающийся тем, что, с целью упрощения конструкции и увеличния надфкности манипулятора, он снабжен шарнирко закрепленным на руке двуплечим рычагом, расположенным в плоскости качания руки, причем одно его плечо кинематически связано с захватом, а другое - с датчиком веса ; объекта,
Источники информации, принятые во внимание при экспертизе
1, Манипулятор ХШ-63, проспект научно-производственного объединения Комплекс, Волгоград, 1977.
