Изобретение относится к горным и строительнь&л машинам, а именно к устройствам для передвижения экскаваторов, отвалообразователей и других машин.
Известен гидравлический механизм шагания экскаватора, включанмций башмаки, соединенные посредством подъемных и тяговых гидроцилиндров с поворотной платформой экскаватора 1.
Наиболее близким к предлагаемому является устройство для передвижения землеройных машин, включающее поворотную платформу, опорную раму, башмаки, нижние и верхние распорные рычаги и упорные ролики 2 .
Недостатками известных устройств являются сложность конструкции и большой вес, обусловленный установкой элементов устройств на больших расстояниях друг от друга и необходимостью использования дополнительных металлоконструкций для крепления элементов и восприятия нагрузок , действующих при передвижении землеройной машины на пово отную платформу.
Цель изобретения - упрощение конструкции и .снижение веса устройства
Поставленная цель достигается тем, что устройство для передвижени землеройных машин, включающее поворотную платформу, опорную раму, башмаки, нижние и верхние распорные рычаги и упорные ролики, снабжено закрепленными на поворотной платформе посредством осей обоймами и установленными внутри них поворотными лопастями, причем поворотные лопасти образуют с обоймами посредством уплотнений герметичные полости и соединены с верхними распорными рычагами.
На фиг. 1 показано устройство для передвижения землеройных машин.
общий вид, на фиг. 2 - разрез А-А на фиг. 1.
Устройство для передвижения землеройных машин включает башмаки 1, опорную раму 2, нижние 3 и верхние 4 распорные рычаги, упорные ролики 5, оси б, обоймы 7, закрепленные на поворотной платформе 8 и снабженные поворотными лопастями 9, образующими с обоймами 7 посредство уплотнений 10 герметичные полости
11 н 12.
Устройство работает следующим образом.
Перед началом перемещения землеройной машины происходит опускание башмаков 1, при этом в полости 12 подается рабочая жидкость, лопасти 9 и, срответственно, оси б поворачиваются против часовой стрелки и осуществляется выпрямление рычагов 3 и 4, причем рычаги 3 обкатываются относительно упорных роликов 5. При дальнейшем повороте лопастей 9 и выпрямлении рычагов 3 и 4 верхний конец рычагов 4, воздействуя на оси 6 и обоймы 7, осуществляется подъем передней части землеройной машины с одновременным перемещением машины на величину шага, при этом задняя кромка опорно рамы 2 волочится по грунту.Затем производится подъем башмаков 1, при этом рабочая жидкость подается в полости 11, лопасти 9 и, соответственно, оси б поворачиваются по часовой стрелке и происходи складывание рычагов 3 и 4.
Рабочий цикл шагания повторяется
Такое выполнение предлагаемого устройства для передвижения землеройных машин позволит упростить конструкцию и снизить вес устройств для передвижения и, следовательно/ вес землеройной машины.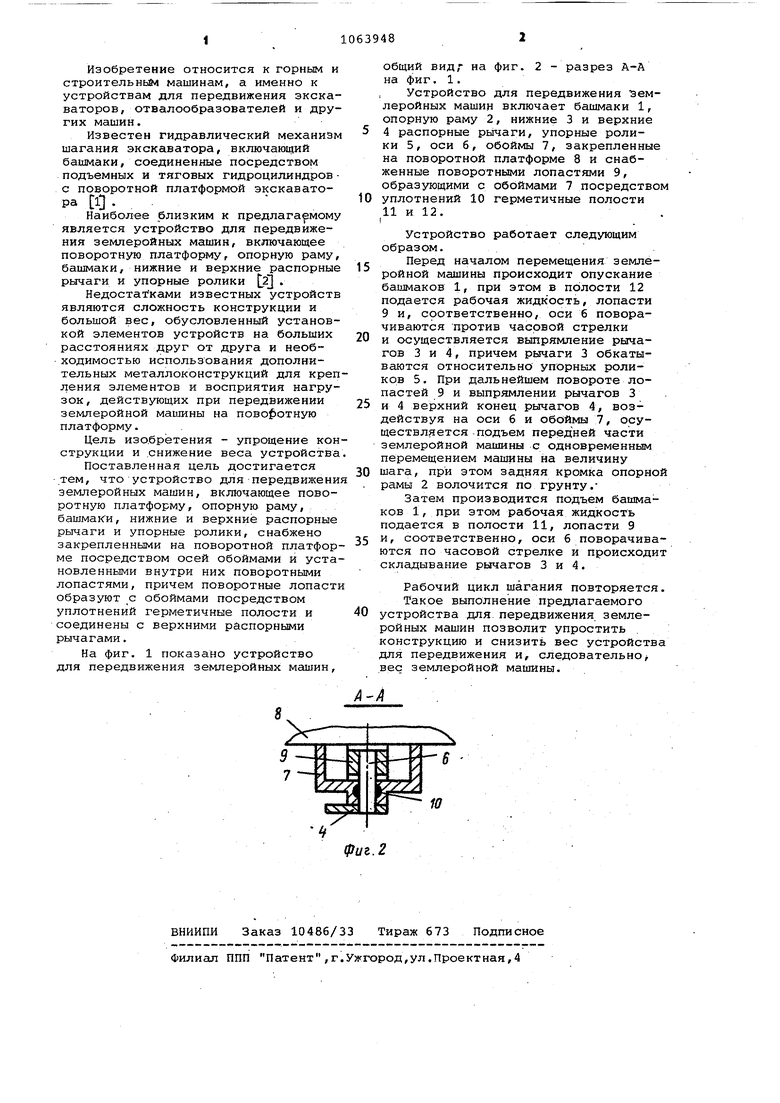
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания | 1985 |
|
SU1239229A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1073393A1 |
| Механизм шагания экскаватора | 1980 |
|
SU899802A1 |
| Механизм шагания | 1986 |
|
SU1430473A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 1965 |
|
SU170403A1 |
УСТРОЙСТВО ДЛЯ ПЕР-ЕДВИЖЕНИЯ ЗЕМЛЕРОЙНЬЕ МАШИН, включающее поворотную платформу, опорную раму, башмаки, нижние и верхние распорные рычаги и упорные ролики, о т л ичающееся тем, что, сцелью упрощения конструкции и снижения веса устройства, оно снабжено закрепленными на поворотной платформе посредством осей обоймами и установленными внутри них поворотными лопастями, причем поворотные лопасти образуют с обоймами посредством уплотнений герметичные полости и соединены с верхними распорными рычагами . СЛ о : со N 00 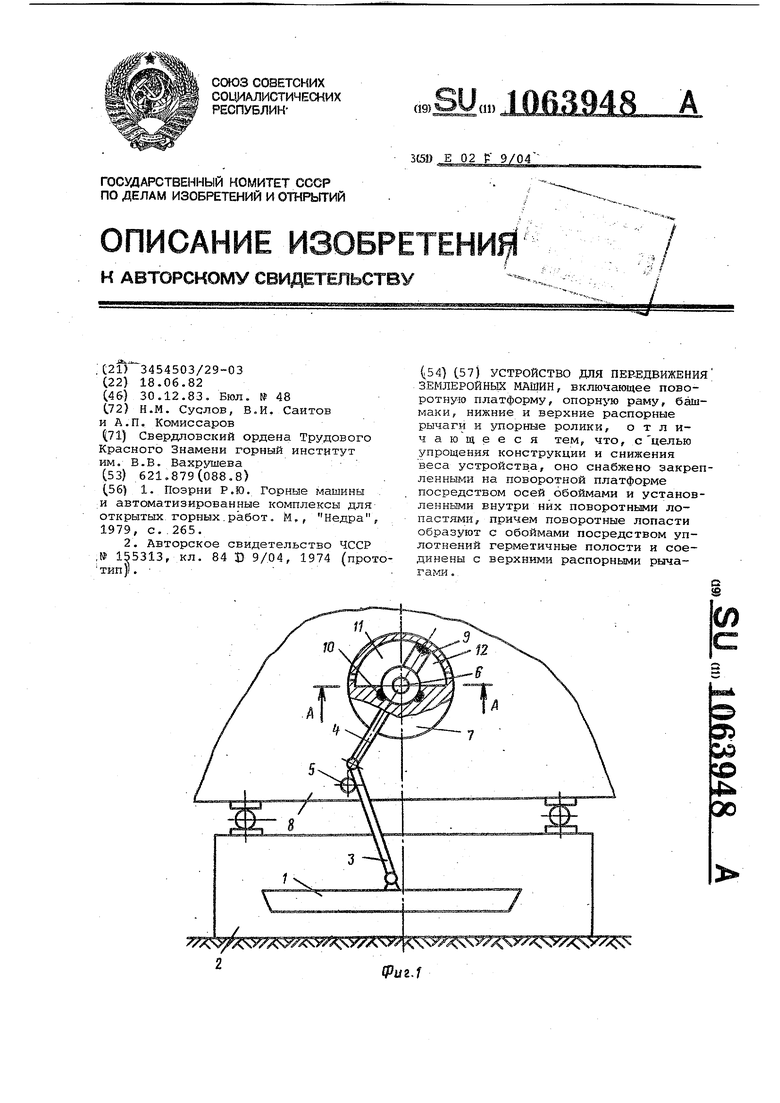
(риг. 2
