4
СО
о
4
СО
°: -t
yvv
При дальнейшем выдвижении штоков 16 после опускания на грунт опорных башмаков 1 верхний конец рычага 4, воздействуя на шарнир 8, осуществляет подъем передней по ходу части машины на определенную высоту. Затем кронштейны 18 упираются в упоры 19, установленные на опорных башмаках 1. По сле этого при дальнейшем выдвижении штока 16 осуш,ествляется перемеш,е- ние машины на величину шага, при этом
Изобретение относится к механизмам шагания, а именно к механизмам шагания рычажного типа.
Цель изобретения - снижение трудоемкости изготовления путем сокраш.ения числа силовых гидроцилиндров.
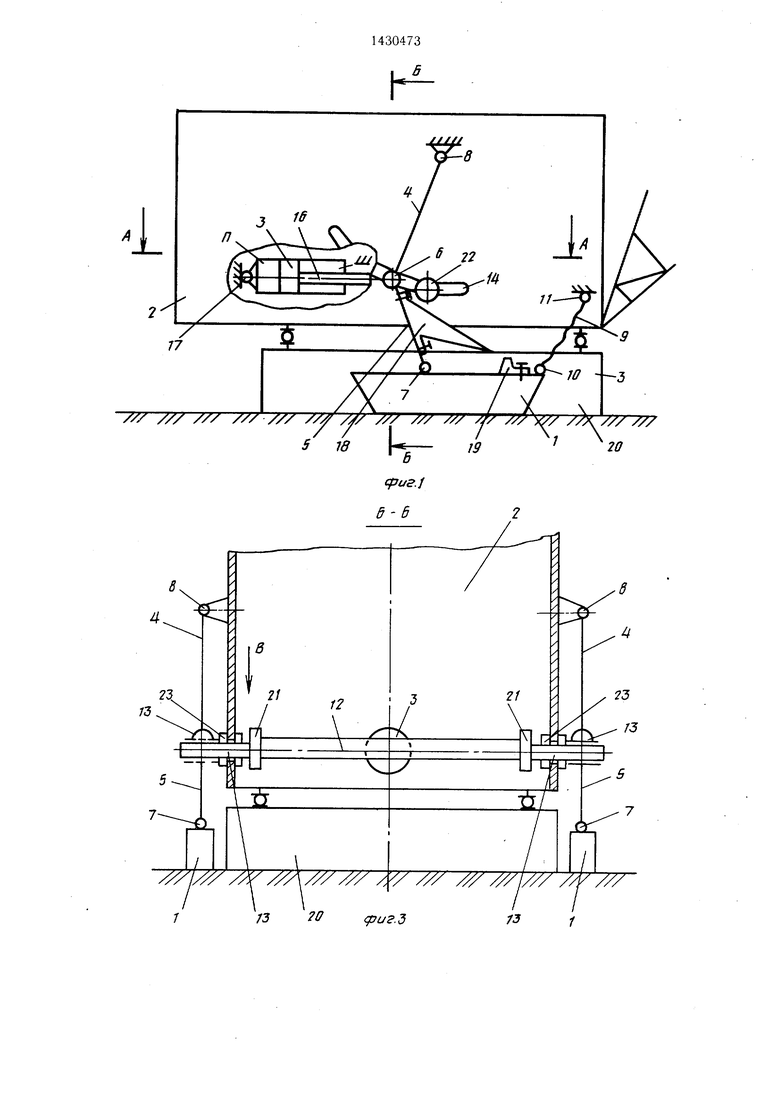
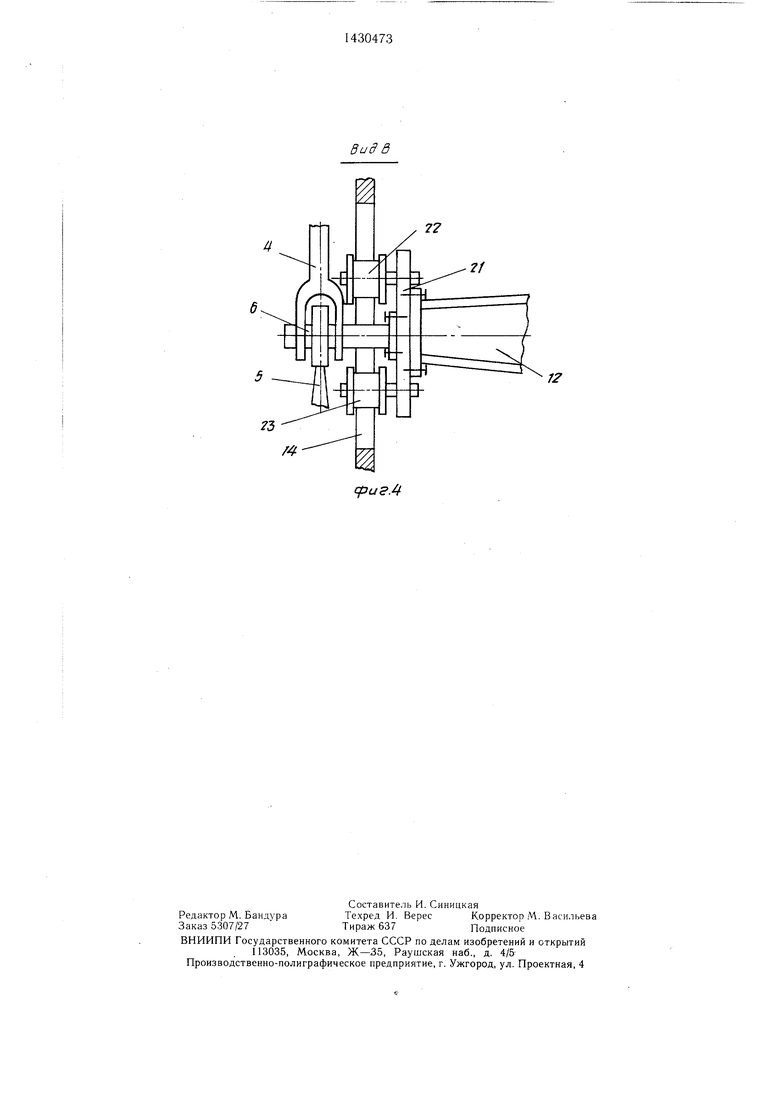
На фиг. 1 изображен механизм шагания, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - вид В на фиг. 3.
Механизм шагания включает опорные Ю верхние распорные рычаги 4 поворачиваются башмаки 1, размещенные по обеим сторо-вокруг шарниров 6, неподвижных по отнонам поворотной платформы 2, силовой гидро-шению к опорным башмакам 1, а задняя кромцилиндр 3, распорные рычаги 4 и 5, свя-ка опорной базы 20 волочится по грунту,
занные между собой шарниром 6, а с опор-Далее производится подъем опорных башi ными башмаками 1 и корпусом машинымаков 1, при этом рабочая жидкость пода шарнирами 7 и 8 соответственно. Гибкая тя- ется в штоковую полость (Ш) гидроцилинд- га 9, соединяющая опорный башмак 1 с по-ра 3, осуществляется складывание распор: воротной платформой 2, закреплена с по-иых рычагов 4 и 5, шток 16 втягивается
мощью шарниров 10 и 11.до упора, гибкая тяга 9 натягивается и опор; Шарниры 6 правой и левой сторон ме-ные башмаки 1 отрываются от грунта, после
: ханизма шагания, связывающие распорные 20 рабочий цикл шагания мащины повтоI рычаги 4 и 5, соединены механической I связью в виде поперечной балки 12 посред- I ством подвижных опор 13, располо(нных в : направляющих 14 поворотной платформы 2, в средней части поперечной балки 12 с : ПОМОЩЬЮ шарнира 15 крепится щток 16 си- 25 лового гидроцилиндра 3, прикрепленного с : помощью шарнира 17 к поворотной платфор- I ме 2.
; На нижних распорных рычагах 5 установлены кронштейны 18, а на опорных башряется.
Формула изобретения
1. Механизм шагания, включающий расположенные с двух сторон платформы опорные башмаки, верхние и нижние распорные рычаги, одни концы которых соответственно щарнирно связаны с платформой и башмаками, ограничители угла поворота нижних
I маках 1 размещены упоры 19, экскаватор распорных рычагов, гибкие тяги, соединен установлен на базе 20.
Опоры 13 выполнены с балками 21, закрепленными на концах поперечной балки
: 12, на обоих концах которых крепятся ро|лики 22 и 23, перемещающие по направляющим 14 платформы 2 экскаватора.
Работа механизма шагания заключается в следующем.
Перед началом перемещения машины
происходит опускание опорных башмаков
35
ные с платформой и концами опорных бащ- маков, центр тяжести которых расположен между нижним распорным рычагом и гибкой тягой, отличающийся тем, что, с цель снижения трудоемкости изготовления путем сокращения числа силовых гидроцилиндров, платформа по бокам имеет направляющие, а механизм снабжен поперечной балкой, концы которой выполнены в виде расположенных в направляющих опор и шарнирно связаi на грунт, при этом в порщневую полость. 40 ны со свободными концами распорных рыча(П) гидроцилиндра 3 подается рабочая жид- : кость, а из штоковой полости (111) гидро- щилиндра 3 рабочая жидкость отводится, шток 16 выдвигается, перемещает поперечную балку 12 с опорами 13 и шарнирами 6, связывающими распорные рычаги 4 и 5. При этом поворачиваются распорные рычаги 4 и 5 вокруг шарниров 8 и 7 соответственно.
гов, при этом силовой гидроцилиндр шарнирно соединен с поперечной балкой и платформой вдоль ее продольной оси.
2. Механизм по п. 1, отличающийся тем, что каждая опора поперечной балки выполнена в виде шарнирного двуплечего рычага, на концах которого расположены ролики.
При дальнейшем выдвижении штоков 16 после опускания на грунт опорных башмаков 1 верхний конец рычага 4, воздействуя на шарнир 8, осуществляет подъем передней по ходу части машины на определенную высоту. Затем кронштейны 18 упираются в упоры 19, установленные на опорных башмаках 1. По сле этого при дальнейшем выдвижении штока 16 осуш,ествляется перемеш,е- ние машины на величину шага, при этом
ряется.
Формула изобретения
1. Механизм шагания, включающий расположенные с двух сторон платформы опорные башмаки, верхние и нижние распорные рычаги, одни концы которых соответственно щарнирно связаны с платформой и башмаками, ограничители угла поворота нижних
распорных рычагов, гибкие тяги, соединенраспорных рычагов, гибкие тяги, соединен
ные с платформой и концами опорных бащ- маков, центр тяжести которых расположен между нижним распорным рычагом и гибкой тягой, отличающийся тем, что, с цель снижения трудоемкости изготовления путем сокращения числа силовых гидроцилиндров, платформа по бокам имеет направляющие, а механизм снабжен поперечной балкой, концы которой выполнены в виде расположенных в направляющих опор и шарнирно связагов, при этом силовой гидроцилиндр шарнирно соединен с поперечной балкой и платформой вдоль ее продольной оси.
2. Механизм по п. 1, отличающийся тем, что каждая опора поперечной балки выполнена в виде шарнирного двуплечего рычага, на концах которого расположены ролики.
h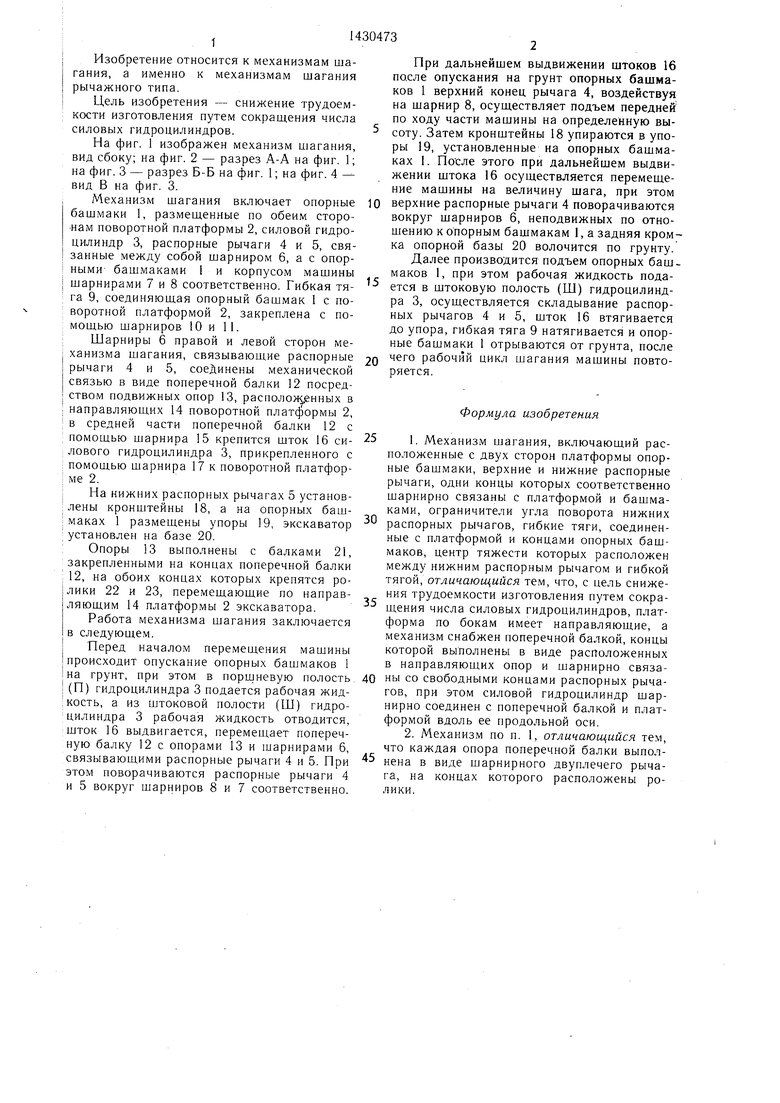
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания | 1985 |
|
SU1239229A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2259280C1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1384692A1 |
| БАШНЯ КРАНА | 1992 |
|
RU2045463C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| Механизм шагания экскаватора | 1982 |
|
SU1073393A1 |
| Шагающее ходовое оборудование | 1987 |
|
SU1447999A1 |
| Механизм шагания экскаватора | 1979 |
|
SU829820A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
Изобретение относится к механизмам шагания, а именно к механизмам шагания рычажного типа. Цель - снижение трудоемкости изготовления путем сокращения числа силовых гидроцилиндров. Механизм шагания включает расположенные с двух сторон поворотной платформы 2 опорные башмаки 1 и направляюш.ие 14, верхние распорные рычаги (РР) и нижние РР 5. Шарниры 6, связываюшие РР, соединены поперечной балкой (ПБ) 12 посредством подвижных опор 13, расположенных в направляющих 14. К средней части ПБ 12 прикреплен шток 16 силового гидроцилиндра (ГЦ) 13, прикрепленного с помощью нира 17 к поворотной платформе 2. Перед началом перемещения машины происходит опускание опорных башмаков 1 на грунт. При этом в поршневую полость ГЦ 3 подается рабочая жидкость. Шток 16 выдвигается и перемещает ПБ 12 с опорами 13 и шарнирами 6. При этом РР поворачиваются вокруг соответствующих шарниров. При дальнейшем выдвижении штока 16 осуществляется перемещение машины на величину inara. Затем производится подъем опорных башмаков 1. Для этого производится подача рабочей жидкости в штоковую полость ГЦ 3 и складывание РР. Шток 16 втягивается до упора, гибкая тяга 9 натягивается и опорные башмаки 1 отрываются от грунта. 1 з. п. ф-лы, 4 ил. (О (Л
//У /// //X /// xXX 77 7 хГ/ /// // / /f / X /7 ////77
5 18 19
о
/
20
/ /9 A//////////// //7 ///////// /
13 0 (риг.З
X
/
20
/7/
f
.4
| Ходовое оборудование тяжелых машин | 1978 |
|
SU981522A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм шагания | 1985 |
|
SU1239229A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
