(54) МЕХАНИЗМ ШАГАНИЯ ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Механизм шагания экскаватора | 1982 |
|
SU1086087A1 |
| Механизм шагания экскаватора | 1983 |
|
SU1145097A2 |
| Механизм шагания экскаватора | 1979 |
|
SU829821A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ МЕХАНИЗМА ШАГАНИЯ | 1970 |
|
SU263237A1 |
| Экскаватор | 1983 |
|
SU1117384A1 |
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Механизм шагания | 1986 |
|
SU1328448A1 |
| Механизм шагания экскаватора-драглайна | 1990 |
|
SU1735509A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |
I
Изобретение относится к землеройной технике, .в частности к механиз.мам шагания экскаваторов.
Известен механизм шагания экскаватора, предназначенный для его передвижения, содержащий гидроцилиндры , которые верхним концо.м прикреплены к раме машины, а нижним шарнирно связаны с опорными лыжа.ми 1 .
Наиболее близким по технической суш,ности к изобретению является экскаватор, содержаш,ий приводной вал с установ,-1енным на нем направляюш1им элементом, опору с лыжей и упорным дугообразным элементом на раме машины и силовые цилиндры подъема лыжи 2 .
В известном механизме 111агания постоянная связь опор с лыжами не позволяет рационально использовать характеристики привода, так как за один оборот вала совершается один цикл, шагания, что отрицательно сказывается на скорости передвижения машины.
Цель изобретения - повышение скорости передвижения и плавности .хода экскаватора.
Указанная цель достигается тем, что в механизме шагания экскаватора, содержащем приводной вал с направляющим элементом, опору с лыжей и упорными дугообразным элементом на -раме машины и силовые цилиндры подъема лыжи, направляющий элемент выполнен с выступами, а опора - с пазами, в которых расположены выступы, при этом направляющий элемент подпружинен с противоположных сторон относительно опоры, имеющей на концах ролики, расположенные с возможностью взаимодействия с лыжей и дугообразным упорным элементом, выполненным с переменной кривизной, увеличивающейся в сторону вращения вала.
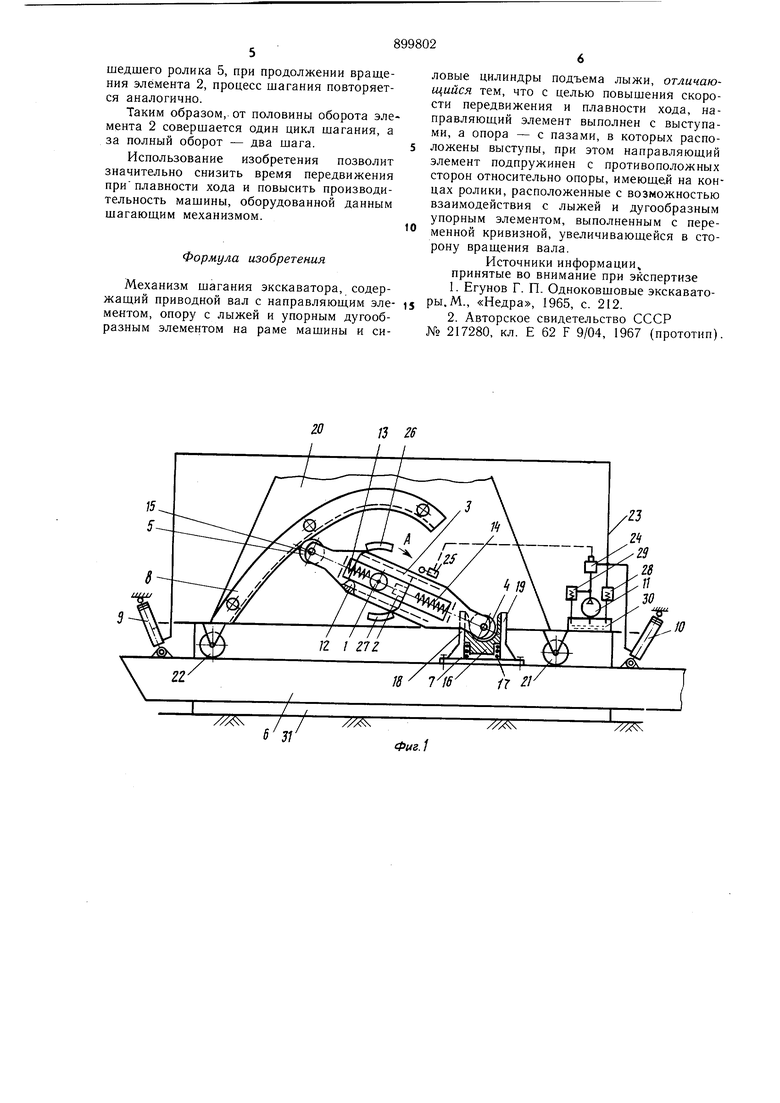
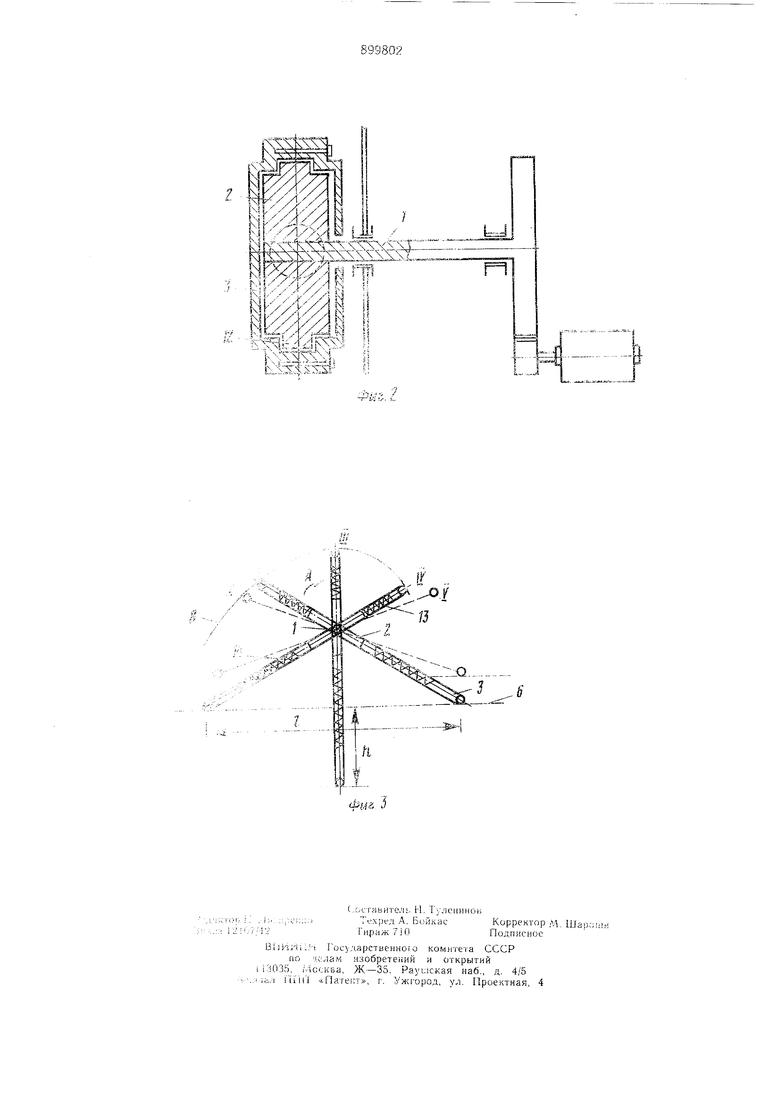
На фиг. 1 изображен механизм Ц1агания, общий вид; на фиг. 2 - направляющий элемент и опоры, поперечное сечение; на фиг.Зсхема положений опоры и лыжи в процессе шагания.
Механизм шагания содержит приводной вал 1, направляющий элемент 2, опору 3 с ролика.ми 4 и 5, лыжу 6 с гнездом 7, упорный элемент 8, силовые цилиндры 9 и 10 и насосную установку 11. Направляющий элемент 2 центром симметрии установлен и жестко закреплен на приводном (ходовом) валу -1 и имеет с двух сторон по окружности выступы, образующие параллельные направляющие 12, входящие в пазы опоры 3. Опора 3 состоит из двух сомкнутых и скрепленных между собой болтами и осями 15 продольных частей. В образуемой полости опоры 3 установлены пружины 13 и 14, которые одним концом заходят в радиальные гнезда направляющих элементов 2. Обе пружины установлены с одинаковым моментом сжатия и стремятся уравновесить положение опоры 3 на элементе 2. Ролики 4 и 5, например, бочкообразной формы установлены с двух концов опоры 3 в проушинах на осях 15 и имеют возможность вращаться на них и взаимодействовать с подпятником 16 гнезда 7 и дугообразным упором 8. Подпятник 16 установлен в гнезде 7 лыжи 6 подвижно и в вертикальной плоскости поджат пружиной 17. Верхняя часть гнезда 7 имеет направляющие выступы 18 и 19, которые имеют возможность заходить между проушинами опоры 3 при заходе- ролика в данное 1нездо. Дугообразный упор 8 выполнен с переменной кривизной и закреплен неподвижно на раме машины. Посредством силовых цилиндров 9 и 10 лыжа 6 подвешена к раме 20 и взаимодействует с ней посредством амор тизирующих роликов 21 и 22. Силовые цилиндры 9 и 10 одностороннего действия и подключены к насосной установке 11 посредством нагнетательной магистрали 23 с золотником 24, цепь управления которого содержит датчик 25, взаимодействующий с упорами 26 и 27, закрепленными на направляющем элементе 2. Разгрузочные клапаны 28 и 29 обеспечивают слив рабочей жидкости в маслобак 30. Механизм работает следующим образом. В поднятом положении лыжа 6 удерживается рабочей жидкостью в цилиндрах 9 и 10. При этом ролик 4 расположен в гнезде 7 и контактирует с выступами поднятиика 16. Опора 3 занимает наклонное положение к лыже 6 (под углом 20-30°, а заданное положение лыжи с гнездом 7 обеспечивается полностью поднятыми поршнями цилиндров 9 и 10 и соответствующей длиной штоков, закрепленных под встречным углом друг к другу. Конец опоры 3 с роликом 5 находится на относительном пологом участке упора 8. При создании вращения ходового вала 1, а следовательно и элемента 2 вместе с опорой 3 (по стрелке А), опора роликом 4 воздействует па подпятник 16 и, сжимая пружину 17, начинает перемещать лыжу б, ВНИЗ, вытесняя усилием привода жидкость из цилиндров 9 и 10 в маслобак 30 через разгрузочный клапан 28, а из насосной установки 11 жидкость переливается через клапан 29. При этом другой конец опоры 3 с роликом 5 по мере вращения элемента 2 переходит на участок дугообразного упора 8 с более крутым изгибом, расположенным ближе к ходовому валу 1. Распорное усилие при контакте ролика с упором вызывает продольное перемещение опоры на элементе 2 в сторону подпятника 16. Происходит укорочение плеча опоры с роликом 5 и удлинение плеча с роликом 4, что соответствует операции опускания лыжи 6 по крутой траектории. К моменту опускания лыжи на грунт (фиг. 3, положение II) пята опоры 3 с роликом 5 выходит на участок постоянного радиуса дуги упора 8, и дальнейшее вращение опоры, сопровождающееся подъемом машины над опорной поверхностью на высоту h (с наклоном за счет центра тяжести машины) происходит без перемещения опоры 3 на элементе 2 (фиг. 3, положение III). Вышедший из проема между проушинами опоры 3 направляющий выступ 18 при этом находится во взаимодействии с роликами 4 посредством подпятника 16 с его разлитыми верхними краями, повышая тем самым надежность взаимодействия с лыжей, а ролик 4 вращается только относительно оси крепления. После заканчивания шага (фиг. 3, положение IV), когда машина перемещается на длину шага Е- и опускается опорной частью 31 на грунт, ролик 5 еще не сходит с концов упора 8, а упор 26 не доходит до датчика 25, золотник 24 закрыт и жидкость от насосной установки 11 перепускается через разгрузочный клапан 29 в маслобак 30. Продолжающееся вращение элемента 2 приводит сначала к выходу ролика 4 из направляющих 18 и 19, сходу ролика 5 с конца упора 8 и перемещению опоры 3 на элементе 2 под влиянием сжатой пружины 13 с отходом ролика 4 от подпятника и заходом его под упорный элемент 8 (фиг. 3, положение V). Датчик 25 отрегулирован по месту установки таким образом, что от воздействия на него упора 26 золотник 24 включается только после полного выхода ролика 4 из направляющих 18 и 19 и схода ролика 5 с конца упора 8. Продолжая воздействовать упором 26, поворот опоры 3 на угол около 50° продолжается с поступлением жидкости по трубопроводам 23 в цилиндры 9 и 10, наклонное положение которых способствует форсированию скорости подъема лыжи 6 и совпадению ролика 5 с гнездом 7 при полностью поднятых поршнях. После амортизации пружиной 17 встречного взаимодействия подпятника 16 подошедшего ролика 5, при продолжении врашения элемента 2, процесс шагания повторяется аналогично. Таким образом, от половины оборота элемента 2 совершается один цикл шагания, а за полный оборот - два шага. Использование изобретения позволит значительно снизить время передвижения при плавности хода и повысить производительность машины, оборудованной данным шагаюшим механизмом. Формула изобретения Механизм шагания экскаватора, содержащий приводной вал с направляющим элементом, опору с лыжей и упорным дугообразным элементом на раме машины и си/7 :/ / ловые цилиндры подъема лыжи, отличающийся тем, что с целью повышения скорости передвижения и плавности хода, направляющий элемент выполнен с выступами, а опора - с пазами, в которых расположены выступы, при этом направляющий элемент подпружинен с противоположных сторон относительно опоры, имеющей на концах ролики, расположенные с возможностью взаимодействия с лыжей и дугообразным упорным элементом, выполненным с переменной кривизной, увеличивающейся в сторону вращения вала. Источники информации, принятые во внимание при экспертизе 1. Егунов Г. П. Одноковшовые экскаваторы.М., «Недра, 1965, с. 212. 2. Авторское свидетельство СССР Яд 217280, кл. Е 62 F 9/04, 1967 (прототип).
