Изобретение относится к механизл:ам шагания, применяемым для передвижения крупных экскаваторов-драглайнов. Известен механизм шагания для пезедвижения крупных шагающих экскаваторов-драглайнов, представляющий собой ,с,ва подъемных цилиндра и два всномогате.чьных (тяговых) цилиндра, установленны с боков поворотной платформы экскаватор; и шарнирно опертых на башмак. Два подъемных цилиндра поднимают одну сторону опорной рамы, противоположная сторона оперта на грунт, а два вспомогательных (гяговых) цилиндра перемещают опертую кромку рамы относительно грунта. Таким образом, экскаватор в момент передвижения имеет три точки опоры (третья точка волочится по грунту) 1 . Наиболее близким к изобретению по технической сущпости является механизм с полным отрыЕ.ом шагания экскаватора включающий четыопорной рамы от грунта ре подъемных цилиндра,попарно расположенных с боков . поворотной платформь: и нарнирно опертых на каретки, передвигающиеся по обработанным направляющем башмаков, четыре тяговых цилиндра, горизонтально смонтированных на верху 6aniмаков, насосы и гидрораспределители. Четыре подъемных цилиндра поднимают оп-орную пад грунтом, а четыре толкающих цилиндра перемещают машину на каретках по обработанным поверхностям башмаков 2. Указанный механизм шагания обеспечивает относительно надежное передвижение экскаватора только в одном направлении, а именно в сторону, противоположную с реПри существуюпдих схемах управления гидроцилиндрами перемещение в сторону стрелы практически невозможно, так как при движении на спуск не исключается самонроизво;п5ное движение машины под действием силы тяжести, что может привести к тяжелой аварии. Указанное обстоятельство ведет к нерациональному увеличению времени ш:агания экскаватора, а следойательно, и снижению производительности. Целью изобретения является повышение производительпости экскаватора путем увеличения надежности перемещения экскаватора в обоих направлениях. Указанная цель достигается тем, что в гидравлическом механизме ша1ания экскаватора с полным отрывом опорной рамы от грунта, включаюндем подъемные и Т Иовые цилиндры, насосы, гидрораспределители и трубопроводы, каждый тяговый цилиндр снабжен установленными в трубопровс|дах соединения его полостей с гидрораспр делителем тормозными органами, каждый из которых выполнен из параллельно расположенных обратного клапана и управляемого дросселя, при этом полость управлепия последнего сообщена с трубопроводом, в котором установлен другой тормозной орган. На чертеже изображена схема гидравлического механиз.ма шагания. Поворотная платформа 1 экскаватора со стрелой 2 при работе опирается на опорную раму 3. По обеим сторонам юворотной платформы с помощью подъемных цилиндро в 4 и скользящих опор 5 подвешены лыжи 6. Задняя (по отношению к стреле) лыжа соединена также с поворотной платформой 1 с помощью тяговых цилиндров 7. Обе полости Л и В цилиндров 7 через гидрораспределитель 8 соединены со сливом и насосом 9. В трубопроводы, соединяющие обе полости тягового цилиндра 7 с гидрорасп.ределителем 8, встроены тормозные органы 10 и П. Тормозной орган 10(11) состоит из обратного клапана 12 (13), пропускающего гидрожидкость только в направлении тягового цилиндра 7, и дросселя 14 (15), управляющая полость которого соединена с трубонроводо.м, в котором установлен другой тормозной орган 11(10) (схе.ма управления подъемными цилиндрами не показана) . Механизм шагания работает следующим образом. При помощи подъемных цилиндров 4 лыжи 6, которые при работе экскаватора находятся в поднятом положении, опускаются на грунт. При дальнейп ем нагнетании гидрожидкости в верхние гюлости подъемных цилиндров 4 экскаватор приподнимается на лыжах 6. Для передвижения в направлении стрелы золотник гидрораспределителя 8 переставляется вправо, и жидкость от пасоса 9 через гидрораспределитель 8, открытый обратный клапан 13 тормозного органа 11 поступает в бесштоковую полость В тягового цилиндра 7. Жидкость из штоковой полости А, обходя закрывшийся обратный клапан 12, идет через дроссель 14 тормозного органа 10. Давление жидкости в бесштоковой полости В тягового цилиндра 7 через трубопровод подается в полость управления дросселя 14 и открывает его таким образом, что слив из гюлости А происходит свободно, без торможения. При этом шток тягового цилиндра 7 выдвигается, весь экскаватор начинает перемещаться в сторону стрелы 2, а скользянше опоры 5 перемещаются по лыжам 6. При движении на спуск, когда возникает возможность самопроизвольного спуска за счет малого коэффициента трения на скользящих опорах и действия большой составляющей от веса магнины, стре.мящейся двигать экскаватор, давление жидкости в полости В тягового цилиндра 7 уменьшается. Автоматически уменьшается давление и в управляющей магистрали, в этом случае силой пружины дроссель 14 закрывается, тормозя движение штока тягового цилиндра 7, а вместе с тем и всего экскаватора. После окончания шага производится подъем лыж 6, штоки тяговых цилиндров 7 втягиваются, а затем весь цикл шагания повторяется. При движении в направлении, противоположном стреле 2, после опускания лыж 6 и подъема экскаватора золотник гидрораспределителя 8 переставляется влево. Жидкость от насоса 9 через гидрораспределитель 8, открытый обратный клапан 12 тормозного органа 10 поступает в штоковую полость А тягового цилиндра 7. Жидкость из бесштоковой полости В, обходя закрывшийся обратный клапан 13, идет через дрос сель 15 тормозного органа 11. Давление жидкости в штоковой полости А тягового цилиндра 7 через трубопровод поступает в дроссель 15 и открывает его таким образом, что слив из полости В происходит свободно, без торможения. При движении на спуск в полости А, которая при этом является тяговой, давление уменьшается, автоматически уменьшается давление и в управляюш.ей магистрали. В этом случае силой пружины дроссель 15 закрывается, тормозя движение штОка тягового цилиндра 7, а в месте с тем и всего экскаватора. Таким образом, предлагаемый механизм шагания обеспечивает шагание как в сторону стрелы 2, так и в противоположном направлении, при этом надежно исключается самопроизвольное движение машины в случае шагания на спуск. Использование изобретения расширяет технологические возможности шагаюших драглайнов при сравнительно небольшом усложнении их конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1113492A1 |
| Гидропривод механизма шагания экскаватора | 1987 |
|
SU1562413A1 |
| Сменное оборудование драглайна к одноковшовому гидравлическому экскаватору | 1991 |
|
SU1810423A1 |
| Механизм шагания | 1986 |
|
SU1328448A1 |
| Гидропривод механизма шагания экскаватора | 1988 |
|
SU1535956A1 |
| Гидропривод тягового устройства механизма шагания экскаватора | 1987 |
|
SU1553630A1 |
| Одноковшовый гидравлический экскаватор с механизмом эвакуации грунта | 1990 |
|
SU1776721A1 |
| Самоходный гидравлический экскаватор | 1983 |
|
SU1250622A1 |
| Система сервоуправления гидроприводом экскаватора | 1983 |
|
SU1079780A1 |
ГИДРАВЛИЧЕСКИЙ МЕХАНИЗМ ШАГАНИЯ ЭКСКАВАТОРА с полным отрывом опорной рамы от грунта, вклю чающий подъемные и тяговые цилиндры, насосы, гидрораспределители и трубопроводы, отличающийся тем, что, с целью повышения производительности экскаватора путем увеличения надежности перемещения экскаватора в обоих направлениях, каждый тяговый цилиндр снабжен установленными в трубопрводах соединения его полостей с гидрораспределителем тормозными органами, каждый из которых выполнен из параллельно расположенных обратного клапана и управляемого дросселя, при этом полость управления последнего сообщена с трубопроводом, в котором установлен другой тормозной орган. и (Л ;о со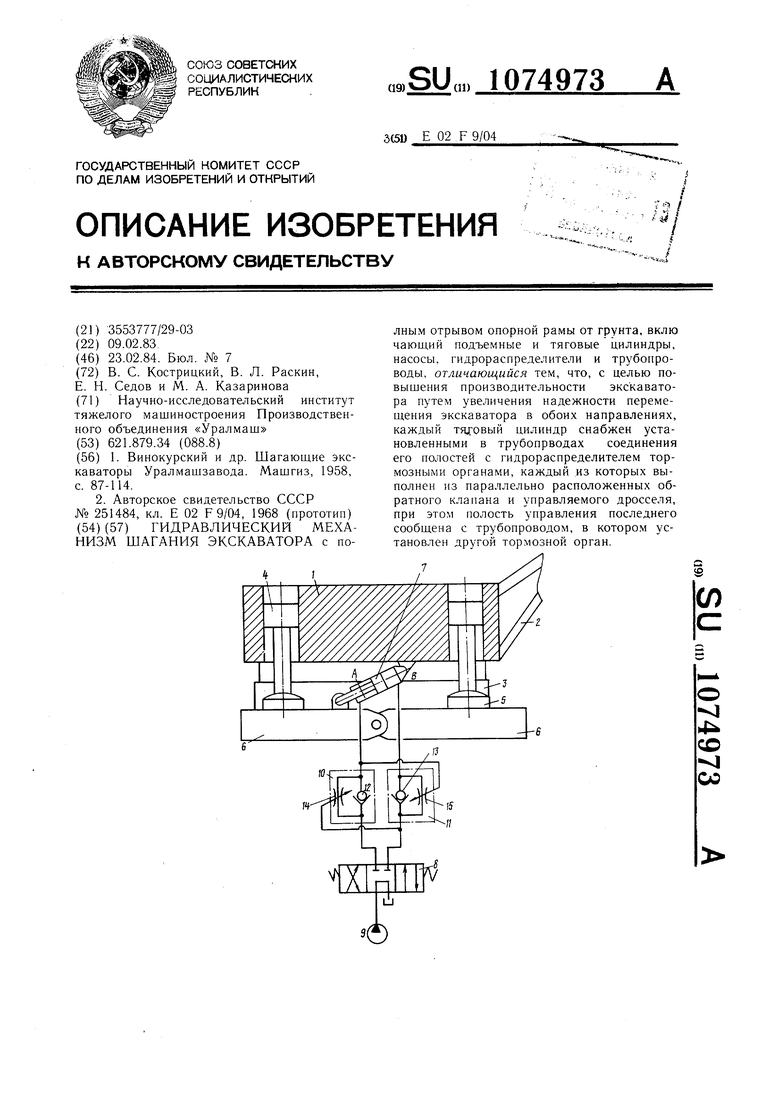
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Винокурении и др | |||
| Шагающие экскаваторы Уралмашзавода | |||
| Машгиз, 1958, с | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 0 |
|
SU251484A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
