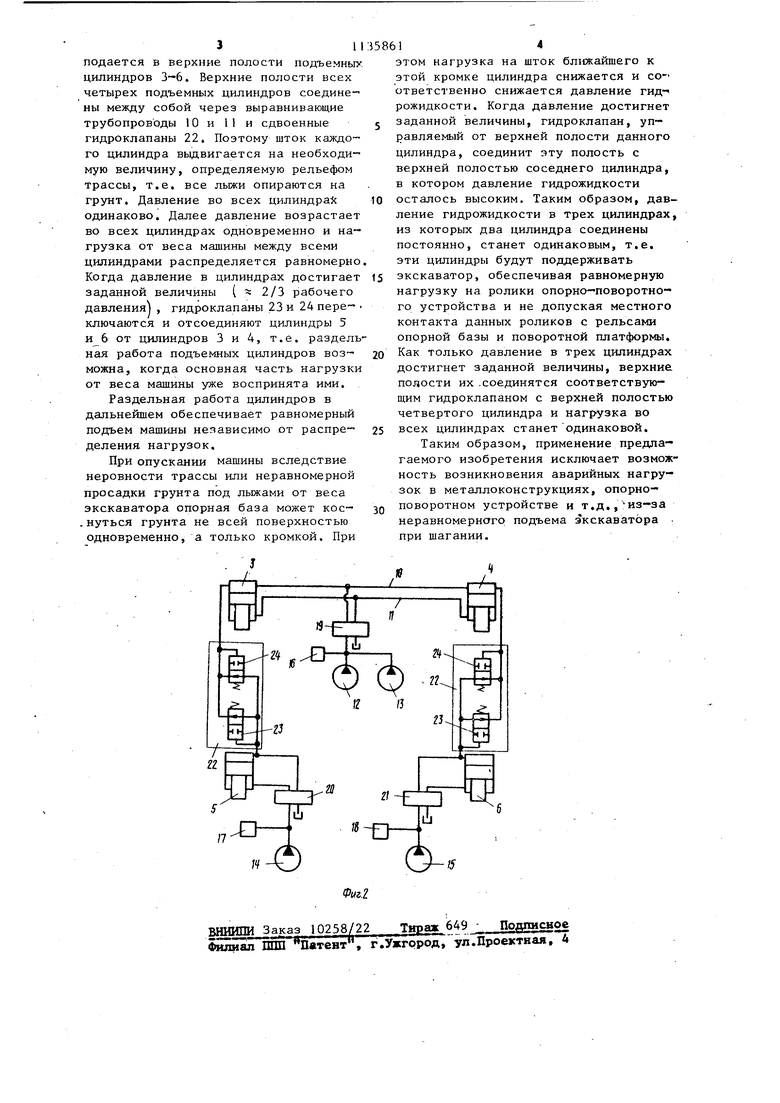
-Изобретение относится к области землеройных машин, а именно к гидроприводам механизмов шагания крупных экскаваторов-драглайнов. Наиболее близким к изобретению является гидравлический привод механизма шагания экскаватора, содержащи четыре подъемных цилиндра, два из которых сообщены выравнивающим тру бопроводом, тяговые цилиндры, насосы и распределители ij . Недостаток известного гидравлического привода заключается в том, что в процессе эксплуатации экскаватор перемещается по относительно неровной и нежесткой поверхности забоя. Поэтому при шагании бывает, что какой-либо из подъемных цилиндров либо два из них) через лыжу обопрет ся на грунт и начнет поднимать экска ватор раньше, чем о.стальные цилиндры Такой односторонний подъем приводит к разному перераспределению нагрузок HBj опорно-поворотном устройстве (роликовом Kpyrej и возникновению мест- ных нагрузок на нем, значительно превосходящих расчетные. Это, в свою очередь, приводит к возникновению трещин в металлоконструкциях опорной рамы и поворотной платформы, а также к усиленному износу рельсов и роликов роликового круга. Аналогичная ситуация возникает при опускании экскаватора на грунт. г. Цель изобретения - повышение на- дежности работы механизма. Указанная цель достигается тем, что гидравлический привод механизма шагания экскаватора, содержащий четыре подъемных цилиндра, два из ко торых сообщены выравнивающим трубопроводом, тяговые цилиндры, насосы и распределители, снабжен двумя двойными гидроуправляемыми клапанами, а поршневые полости сообщенных вырав кивающим трубопроводом подъемных цилиндров соответственно связаны с поршневыми полостями двух других подъемных цилиндров посредством дополнительных выравнивающих трубопроводов, при этом в последних установлены двойные гидроуправляемые клапан управляющие полости которых связаны с соответствующими поршневыми полостями подъемных цилиндров. Благодаря такому выполнению механизма шагания при опускании и опирании башмаков на грунт верхние полости всех цилиндровсоединены друг с другом и в них устанавливается одинаковое давление. При достижении некоторого давления, соответствующего настройке пружин гидроклапанов, они сработают и отсекут верхние полости друг от друга, после чего начнут работать самостоятельно. Но к этому моменту значительная часть нагрузки от массы экскаватора будет уже воспринята подъемными цилиндрами, что исключает опасные перегрузки в опорно-поворотном устройстве. На фиг.1 изображен механизм шагания в момент подъема экскаватора, обдий вид; на фиг.2 - принципиальная гидравлическая схема питания подъемных цилиндров рабочей .жидкостью. Поворотная платформа.1 экскаватора при работе опирается на опорную раму 2. По обеим сторонам поворотной платформы подвешены по два подъемных цилиндра 3-6,к которым через сколь- зяшле опоры 7 подвешены лыжи 8. Задние ЛИЖИ соединены также с поворотной платформой 1 с помощью тяговых цилиндров 9. Верхние полости подъемных цилиндров 3 и 4 соединены через выравнивающие трубопроводь 10 и П. Питание цилиндров рабочей жидкостью производится от насосов 12-15, снабженных предохранительными клапанами 16-18, через гидрораспределители 19-21. Подъемные цилиндры 5 и 6 имеют индивидуальное питание, а ци.пиндры 3 и 4 питаются от сдвоенной насосной установки 12 и 13 через обш.ий гидрорасп- ределитель 19, I Между верхними полостями цилиндров 3 и 5, 4 и 6 установлены сдвоенные гидроклапаны 22. Каждый из них состоит из двух гидроклапанов 23 и 24 с гидравлическим управлением от поршневых полостей подъемных цилинд- ров, связанных дополнительными выравнивающими - трубопроводами, в которых установлены сдвоенные гидро- клапаны. Один гидроклапан срабатывает при достижении заданного давления в передних, соединенных цилиндрах 3 и 4, а второй - в заднем цилиндре 5(6). Гидропривод работает следующим образом. В исходном положении штоки подъемных цилиндров втянуты, лыжи подняты. Включаются насосы 12-15, и рабочая жидкость через распределители 19-21 3и подается в верхние полости подъемны цилиндров 3-6. Верхние полости всех четырех подъемных цилиндров соединены между собой через выравнивающие трубопроводы 10 и 11 и сдвоенные гидроклапаны 22. Поэтому шток каждого цилиндра выдвигается на необходимую величину, определяемую рельефом трассы, т.е. все лыжи опираются на грунт. Давление во всех цилиндра с одинаково. Далее давление возрастает во всех цилиндрах одновременно и нагрузка от веса машины между всеми цилиндрами распределяется равномерно Когда давление в цилиндрах достигает заданной величины ( 2/3 рабочего давления, гидроклапаны 23 и 24 пере- ключаются и отсоединяют цилиндры 5 от цилиндров 3 и 4, т.е. раздел ная работа подъемных цилиндров возможна, когда основная часть нагрузк от веса машины уже воспринята ими. Раздельная работа цилиндров в дальнейшем обеспечивает равномерный подъем машины независимо от распределения нагрузок. При опускании машины вследствие неровности трассы или неравномерной просадки грунта под лыжами от веса экскаватора опорная база может кос- .нуться грунта не всей поверхностью одновременно, а только кромкой. При 14 этом нагрузка на шток ближайшего к этой кромке цилиндра снижается и со ответственно снижается давление гид- рожидкости. Когда давление достигнет заданной величины, гидроклапан, управляемый от верхней полости данного цилиндра, соединит эту полость с верхней полостью соседнего цилиндра, в котором давление гидрожидкости осталось высоким. Таким образом, давление гидрожидкости в трех цилиндрах, из которых два цилиндра соединены постоянно, станет одинаковым, т.е. эти цилиндры будут поддерживать экскаватор, обеспечивая равномерную нагрузку на ролики опорно-поворотного устройства и не допуская местного контакта данных роликов с рельсами опорной базы и поворот1ной платформы. Как только давление в трех цилиндрах достигнет заданной величины, верхние полости их .соединятся соответствующим гидроклапаном с верхней полостью четвертого цилиндра и нагрузка во всех цилиндрах станет одинаковой. Таким образом, применение предлагаемого изобретения исключает возмож ность возникновения аварийных нагрузок в металлоконструкциях, опорноповоротном устройстве и т.д.,из-за неравномерного подъема экскаватора при шагании.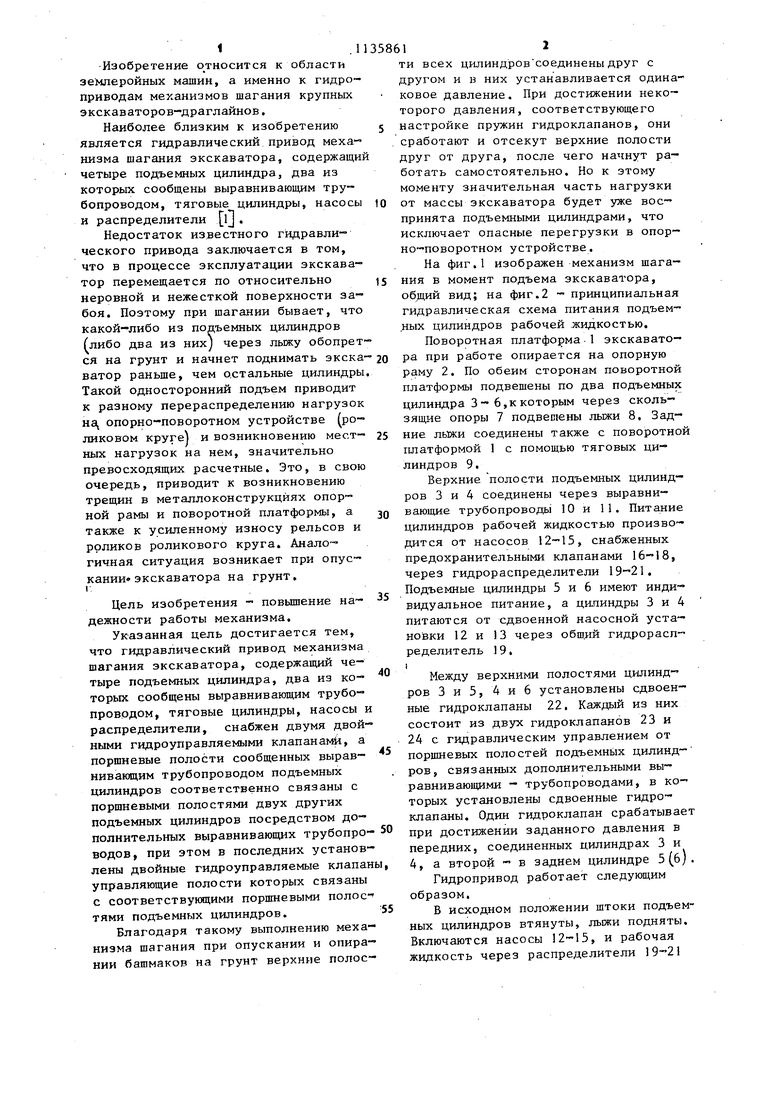
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический механизм шагания экскаватора | 1983 |
|
SU1074973A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1113492A1 |
| Гидропривод механизма шагания экскаватора | 1988 |
|
SU1535956A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Механизм шагания экскаватора | 1982 |
|
SU1167277A1 |
| Гидропривод тягового устройства механизма шагания экскаватора | 1987 |
|
SU1553630A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ УСТРОЙСТВО ЗЕМЛЕРОЙНЫХ МАШИН ТИПА КАРЬЕРНЫХ ЭКСКАВАТОРОВ | 1973 |
|
SU363791A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Механизм перемещения шагающего экскаватора | 1987 |
|
SU1465509A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1991 |
|
RU2018585C1 |
ГИДРАВЛИЧЕСКИЙ ПРИВОД МЕХАНИЗМА ШАГАНИЯ ЭКСКАВАТОРА, содержащий четыре подьемных цилиндра, два из которых сообщены выравнивающим трубопроводом, тяговые щ-шикдры, насосы и распределители, о т л и ч а ю- щ и и с я тем, что, с целью повышения надежности работы механизма, гидропривод снабжен двумя двойными гид- роуправляемыми клапанамиj а поршневые полости сообщенных выравнивающим трубопроводом подъёмных цилиндров соответственно связаны с порпшевы ш полостями двух других подъемных цилиндров посредством дополнительных выравнивающих трубопроводов, при зток в последних установлены двойные гидроуправляемые клапаны, управляющие полости которых связаны с соответствующими поршневыми полостями подъемных цилиндров. (О со :п эо 9д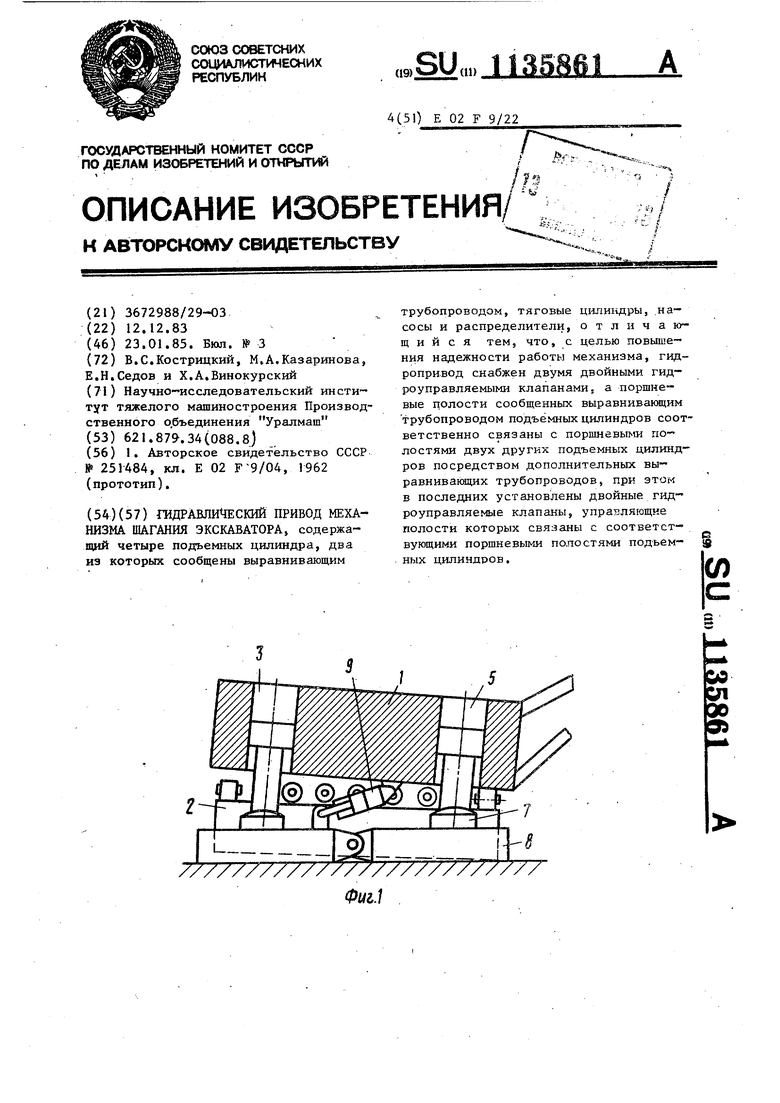
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ОПОРНОЕ УСТРОЙСТВО ШАГАЮЩЕГО ХОДОВОГО МЕХАНИЗМА | 0 |
|
SU251484A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
