Изобретение относится к землеройным машинам, в частности к механизмам шагания.
Цель изобретения - повышение производительности машины путем увеличения скорости ее перемеш,ения.
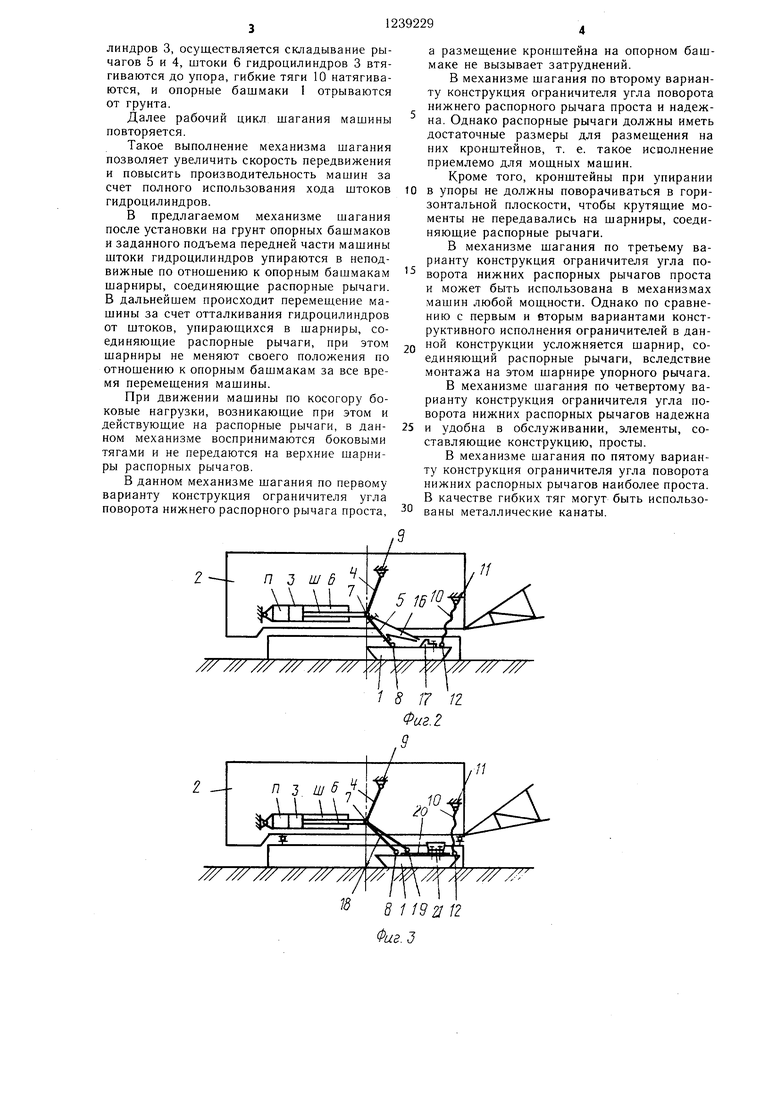
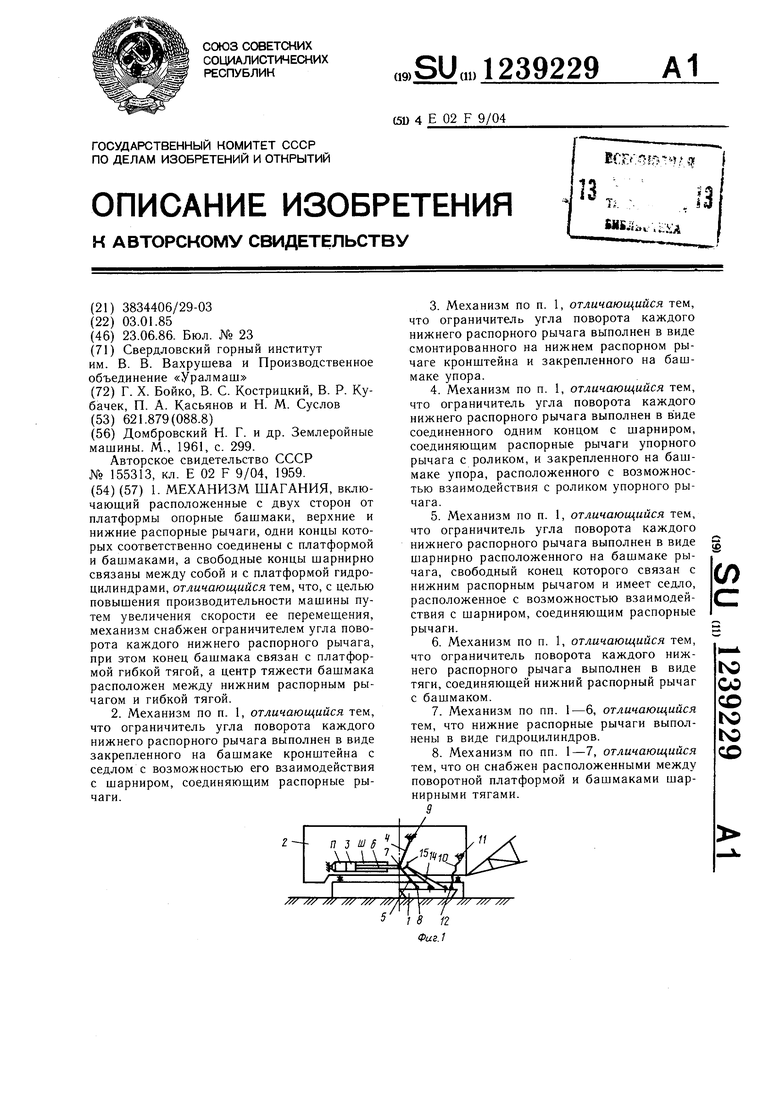
На фиг. 1 изображен механизм шагания по первому варианту, вид сбоку; на фиг. 2 - то же, по второму варианту; на фиг. 3 - то же, по третьему варианту; на фиг. 4 - то же, по четвертому варианту; на фиг. 5 - то же, по пятому варианту; на фиг. 6 - механизм шагания, поперечный разрез.
Механизм шагания содержит башмаки 1, размещенные по обеим сторонам поворотной платформы 2. Каждая сторона имеет силовые гидроцилиндры 3 и распорные рычаги 4 и 5. Рычаги связаны между собой и со штоком 6 гидроцилиндра 3 шарниром 7, а с опорными башмаками 1 и поворотной платформой 2 - шарнирами 8 и 9 соответственно. Гибкая тяга 10, соединяющая опорный башмак 1 с поворотной платформой 2, закреплена с помощью шарниров 11 и 12 соответственно. Опорные башмаки 1 соединены шар- нирно с поворотной платформой 2 посредством боковых тяг 13. Между нижним распорным рычагом 5 и опорным башмаком 1 установлен ограничитель угла поворота нижнего рычага.
По первому варианту ограничитель угла поворота выполнен в виде кронштейна 14, смонтированного на башмаке, и седла 15.
По второму варианту ограничитель угла поворота нижнего распорного рычага выполнен в виде кронштейна 16, смонтированного на нижнем рацпорном рычаге 5, и упора 17, размещенного на опорном башмаке 1.
По третьему варианту ограничитель угла поворота нижнего распорного рычага выполнен в виде рычага 18, смонтированного на шарнире 7, соединяющем распорные рычаги 4 и 5, ролики 19,закрепленного на конце рычага 18 и перемещающегося по направляющим 20 на опорном башмаке, и упора 21, размещенного на опорном башмаке.
По четвертому варианту ограничитель угла поворота нижнего распорного рычага выполнен в виде рычага 22, соединенного с опорным башмаком 1 с помощью щарни- ра 23, и седла 24 с направляющими 25, размещенными на конце рычагов 22.
По пятому варианту ограничитель угла поворота нижнего распорного рычага выполнен в виде гибкой тяги 26, соединенной с помощью шарнира 27 с нижним распорным рычагом 5 и шарнира 28 на передней части башмака по ходу машины - с опорным башмаком 1.
Механизм шагания работает следующим образом.
Перед началом перемещения машины происходит опускание опорных башмаков 1 на грунт, при этом в поршневые полости П гидроцилиндров 3 подается рабочая жид5
5
кость, а из штоковых полостей Ш гидроцилиндров - отводится, штоки 6 гидроцилиндров 3 выдвигаются, поворачиваются распорные рычаги 5 и 4 вокруг шарниров 8 и 9 соответственно и гибкая тяга 10 вокруг шарнира 11.
При дальнейшем выдвижении штоков 6 гидроцилиндров 3 после опускания на грунт опорных башмаков 1 верхний конец рычага 4, воздействуя на шарнир 9, осуществляет
0 подъем передней части машины на определенную высоту. При этом продолжается поворот распорных рычагов 4 и 5 вокруг шарниров 9 и 8. После подъема машины на заданную высоту при дальнейщем выдвижении штоков 6 гидроцилиндров 3 нижние
- распорные рычаги 5 фиксируются в заданном положении ограничителем угла поворота нижних распорных рычагов 5.
По первому варианту ограничение угла поворота нижних распорных рычагов 5 осуQ ществляется за счет упирания шарниров 7, соединяющих распорные рычаги 4 и 5, в седла 15 кронштейнов 14, смонтированных на опорных башмаках.
По второму варианту ограничение угла поворота нижних распорных рычагов 5 осуществляется за счет упирания кронштейнов 16, смонтированных на нижних распорных рычагах 5, в упоры 17, установленные на опорных башмаках 1.
По третьему варианту ограничение угла g поворота нижних распорных рычагов 5 осуществляется за счет упирания в упоры 21, размещенные на опорных башмаках 1, роликов 19, имеющихся на рычагах 18, которые смонтированы на шарнирах 7, соединяющих распорные рычаги 4 и 5.
По четвертому варианту ограничение угла поворота нижних распорных рычагов 5 осуществляется за счет упирания в шарниры 7, соединяющие распорные рычаги 4 и 5, седел 24, расположенных на концах рычагов 22, которые соединены с опорными баш- 0 маками I с помощью шарниров 23.
По пятому варианту ограничение угла поворота нижних распорных рычагов 5 осу- ахествляется за счет натяжения гибких тяг 26, соединяющих нижние распорные рычаги 5 и опорные башмаки 1 с помощью шарниров 27 и 28.
После фиксации нижних распорных рычагов 5 в заданном положении при дальнейшем выдвижении штоков 6 гидроцилиндров i3 штоки 6 упираются в неподвижные Q по отношению к опорным башмакам 1 шарниры 7, осуществляется перемещение машины на величину шага, при этом верхние распорные рычаги 4 поворачиваются вокруг шарниров 7, неподвижных по отношению к опорным башмакам 1, а задняя кромка 5 базы волочится по грунту.
Затем производится подъем опорных башмаков 1, при этом рабочая жидкость подается в штоковые полости Ш гидроци5
линдров 3, осуществляется складывание рычагов 5 и 4, штоки 6 гидроцилиндров 3 втягиваются до упора, гибкие тяги 10 натягиваются, и опорные башмаки 1 отрываются от грунта.
Далее рабочий цикл шагания машины повторяется.
Такое выполнение механизма шагания позволяет увеличить скорость передвижения и повысить производительность машин за счет полного использования хода штоков гидроцилиндров.
В предлагаемом механизме шагания после установки на грунт опорных башмаков и заданного подъема передней части машины штоки гидроцилиндров упираются в неподвижные по отношению к опорным башмакам шарниры, соединяющие распорные рычаги. В дальнейшем происходит перемещение машины за счет отталкивания гидроцилиндров от штоков, упирающихся в шарниры, соединяющие распорные рычаги, при этом шарниры не меняют своего положения по отношению к опорным башмакам за все время перемещения машины.
При движении машины по косогору боковые нагрузки, возникающие при этом и действующие на распорные рычаги, в данном механизме воспринимаются боковы.ми тягами и не передаются на верхние шарниры распорных рычагов.
В данном механизме шагания по первому варианту конструкция ограничителя угла поворота нижнего распорного рычага проста.
0
5
а размещение кронштейна на опорном башмаке не вызывает затруднений.
В механизме шагания по второму варианту конструкция ограничителя угла поворота нижнего распорного рычага проста и надежна. Однако распорные рычаги должны иметь достаточные размеры для размещения на них кронштейнов, т. е. такое исполнение приемлемо для .мощных мащин.
Кроме того, кронщтейны при упирании в упоры не должны поворачиваться в горизонтальной плоскости, чтобы крутящие моменты не передавались на шарниры, соединяющие распорные рычаги.
В механизме щагания по третьему варианту конструкция ограничителя угла поворота нижних распорных рычагов проста и может быть использована в механизмах машин любой мощности. Однако по сравнению с первым и вторым вариантами конструктивного исполнения ограничителей в данной конструкции усложняется шарнир, соединяющий распорные рычаги, вследствие монтажа на этом щарнире упорного рычага.
В механизме шагания по четвертому варианту конструкция ограничителя угла поворота нижних распорных рычагов надежна 5 и удобна в обслуживании, элементы, составляющие конструкцию, просты.
В механизме шагания по пятому варианту конструкция ограничителя угла поворота нижних распорных рычагов наиболее проста. В качестве гибких тяг могут быть использованы металлические канаты.
0
0
П 3 Ш 6 NJ
1ХД-Ц г г м
П 3 Ш 6
,
18
А / ////
8 1 1921 П Фиг.З
П Ш 6 -j
.AA
ю
///////////// ///,
25
1 7, Ш 5
Л Ы У
I
7
/у ///////// /7//г .Y
5 j 28 8 /2 Фиг.
Фиг. 5
13 i 8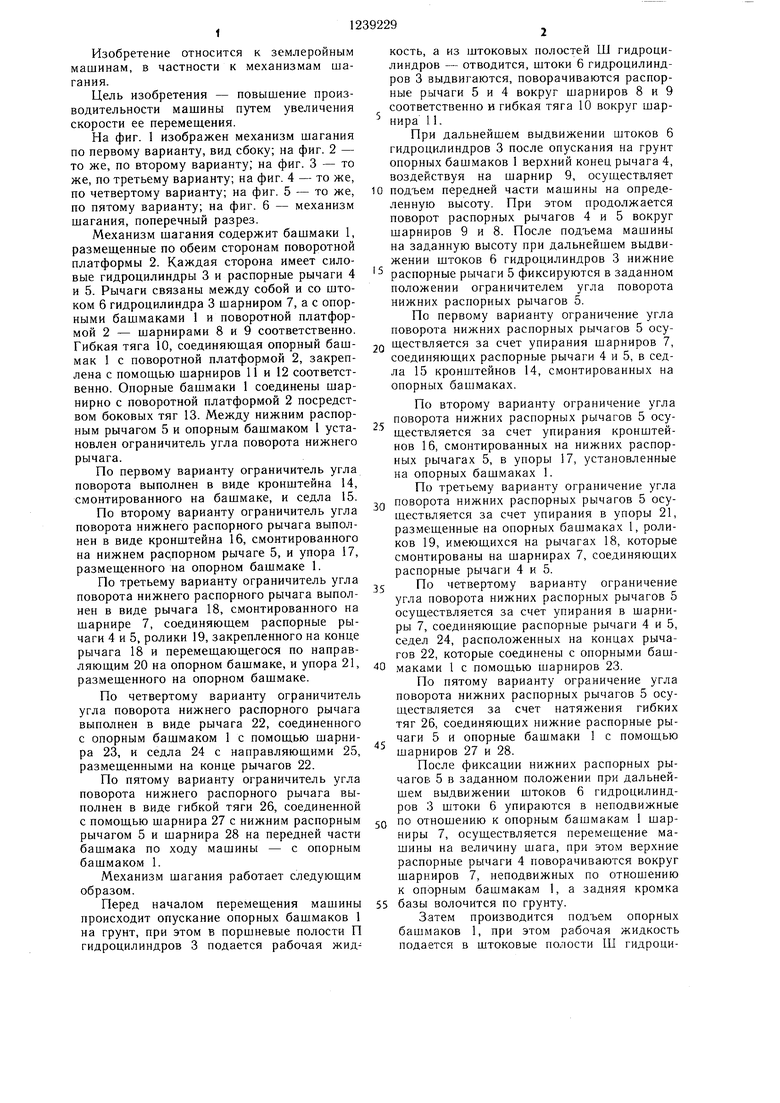
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шагания | 1986 |
|
SU1430473A1 |
| Гидропривод шагающего ходового оборудования экскаватора | 1987 |
|
SU1460142A1 |
| Устройство для выпуска руды | 1981 |
|
SU983283A1 |
| Механизм шагания экскаватора | 1979 |
|
SU829820A1 |
| Опорное устройство шагающей машины | 1973 |
|
SU620555A1 |
| Механизм шагания экскаватора | 1980 |
|
SU947307A1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| ПРОТИВОЭРОЗИОННОЕ ШИРОКОЗАХВАТНОЕ ОРУДИЕ | 2008 |
|
RU2370933C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| Установка для контактной сварки труб | 1988 |
|
SU1574398A1 |
| Домбровский Н | |||
| Г | |||
| и др | |||
| Землеройные машины | |||
| М., 1961, с | |||
| АВТОМАТ ДЛЯ ПУСКА В ХОД ПОРШНЕВОЙ МАШИНЫ | 1920 |
|
SU299A1 |
| 0 |
|
SU155313A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
