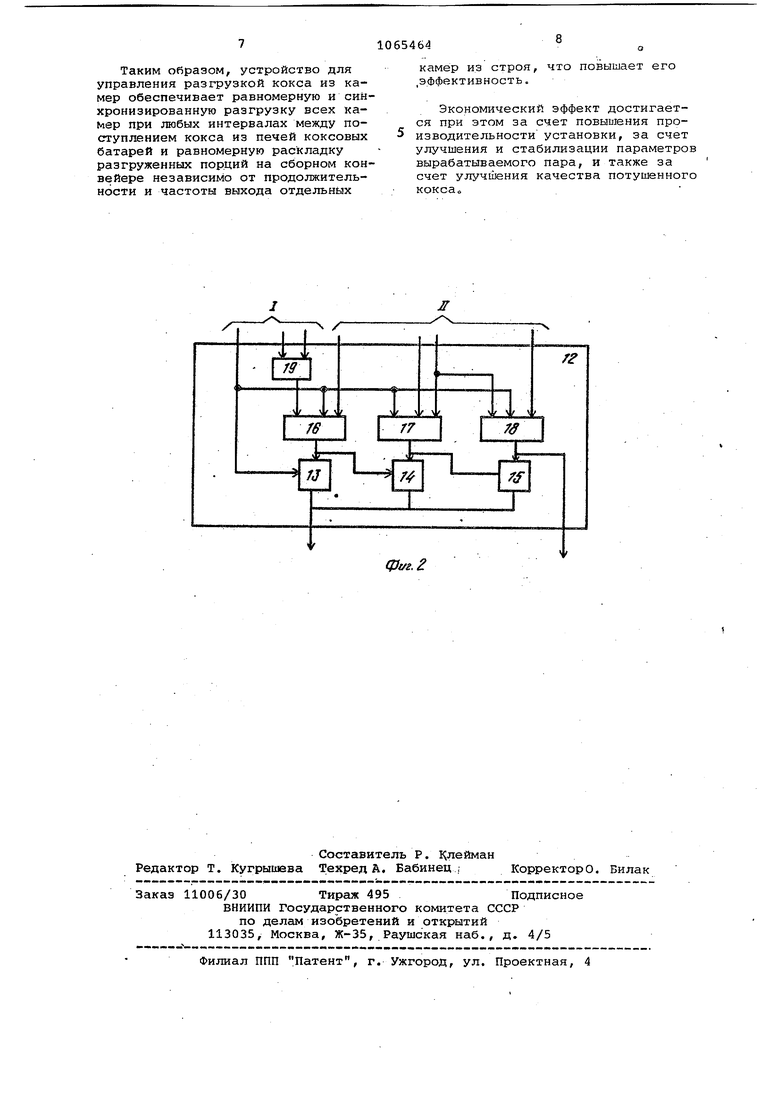
Изобретение относится к контролю и управлению установок сухого тушения koKca и может быть использовано в коксохимической промышленности. Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является устройство для управления разгрузкой кокса из камеры сухого тушения, содержащее блок управления, связанный с блоком ввода и вывода данных, вычислительным блоком и блоком памяти, блоксо пряжения с объектом, соединенный с блоком памяти и с выходом блока управления, блок инициирования команд на разгрузку, блок контроля со стояния основных механизмов, блок контроля технологических параметров блок управления разгрузочными узлами, блок контроля положения механиз мов разгрузочных узлов и датчик загрузки порций кокса в камеры ij . Недостатком известного устройств является то, что оно не осуществляе разгрузку камер в любой очередности их номеров, что не позволяет поддер живать в каждой камере в отдельности средний уровень кокса в ее форка мере, являющийся одним из основных параметров оптимизации процесса туш ния кокса. Кроме того, в устройстве разгрузка камер производится в цикле одна за другой с- интервалами, не зависящими от длительности цикла разгрузки всех камер. Но так как длительность цикла разгрузки камер изменяется в зависимости от изменения интервалов между выдачами печей коксовой батареи, то после последне разгруженной камеры в цикле образуе ся интервал ожидания до начала следующего цикла, что приводит к нерав номерности раскладки порций кокса, выгруженных из камер на ленту сборного конвейера, за весь период работы установки. Целью изобретения является повышение эффективности и надежности устройства. Эта цель достигается тем, что устройстЬо дополнительно содержит блок контроля выполнения операций разгрузки, входы блока инициирования команд на разгрузку связаны с выходами блока контроля положения механизмов разгрузочных узлов, блока контроля технологических параметров , блока контроля состояния основных механизмов и блока сопряжения с объектом, соединенного с выходами датчика загрузки порций в камеры и блока контроля выполнения операций разгрузки, подключенного своими входами к выходам взаимосвязанных блока контрюля положения основных механизмов и блока управления разгрузочными узлами, соединенного с выходом блока инициирования. На фиг. 1 дана принципиальная схема предлагаемого устройства| на фиг. 2 - блок контроля выполнения операций разгрузки. Устройство содержит вычислительный блок 1 и оперативно связанные с ним блок 2 памяти, блок 3 вводавывода данных, блок 4 управления и блок 5 сопряжения с объектом, б.лок б инициирования команд на разгрузку, блок 7 управления разгрузочными узлами, блок 8 контроля положения механизмов разгрузочных узлов, блок 9 контроля состояния основных механизмов блоков камера-котел ;, блок 10 контроля технологических параметров , датчик 11 загрузки порций в камеры и блок 12 контроля выполнения операций разгрузки. Блоки устройства соединены между собой следующим образом. Выходы блока 9 контроля состояния основных механизмов блоков камеракотел подключены к первым входам блока б инициирования команд на разгрузку камер, вторые входы которых подключены к выходам блока 10 контроля технологических параметров, третьи - к первым выходам блока 8 контроля положения механизмов разгрузочных устройств, а четвертые. - к выходам Начало разгрузки блока 5 сопряжения с объектом, выходы блока б инициирования команд на разгрузку подключены к входам Кавитация сигнала начала разгрузки блока 5 сопряжения с объектом и к входам блока 7 управления разгрузочными узлами, другие входы которых подключены к другим выходам блока 8 контроля положения механизмов разгрузочных узлов, третьи выходы которых подключены к входам блока 12 контроля выполнения операций разгрузки, другие входы которых подключены к выходам блока 7 управления разгрузочными узлами, а первые, и вторые выходы блока 12 подключены соответственно к входам Авария разгрузочного узла и Сход начат блока 5 сопряжения с объектом, на выходы Загрузка .закончена которых подключены датчики 11 загрузки порций в камеры. Количество блоков 6-12 соответствует количеству камер установки сухого тушения кокса, которому соответствует также количество информационных входов и управляющих выходов устройства 5 сопряжения с объектом. Блок 12 контроля выполнения операций разгрузки содержит первое, второе и третье реле 13-15 времени для контроля продолжительности выполнения операций по открыванию-закрыванию затворов, первый, второй и третий элементы 16-18 памяти для фиксации фактов выполнения операци разгрузки, а также логическую схему ИЛИ 19. Элементы блока 12 контроля выпол нения операций разгрузки соединены следующим образом. Реле 13 времени соединено своим входом запуска с выходом блока 7 управления разгрузочным узлом, с которым также соединены установочные входы элементов 16-18 памяти, на другие входы которых подключены другие выходы блока 8 контроля положения механизмов разгрузочного блока. Входы логической схемы ИЛИ соединены с выходами датчиков откр того состояния первого и второго о секающих затворов блока 8 контроля положения механизмов разгрузочного блока, а выход ее - с первым входом элемента 16 памяти, выход которого подключен к входу сброса реле 13 времени и входу запуска реле 14 вре мени, вход сброса которого подключе к выходуэлемента 17 памяти, к кото рому также подключен вход запуска реле 15 времени, вход сброса которо подключен к выходу элемента 18 памя ти, который является выходом блока 12, подключенного к входу Сход начат блока 5 сопряжения с объектом на выход Авария разгрузочного узла .которого подключен второй выход бло ка 12, являющийся вторым выходом реле 13-15 времени. Устройство для управления разгру кой кокса из камер установки работа ет следующим образом. Перед запуском устройства с блока 3 ввода данных вводятся данные об интервалах между очередными загрузками порций кокса в каждую камеру. При изменении этих данных корректировка производится вводом измененных данньтх с блока 3. Данные хранятся в блоке 2 памяти. Для управления разгрузочными узлами вычиcJй тeльный б,лок производит расчет моментов выдачи управляющих воздействий таким образом, чтобы независимо от количества работающих камер, поток кокса на сборном конвейере был непрерывным и без накла док порций одна на другую. Так как размер порций загрузки на порядок больше порции разгрузки, то и часто та включения разгрузочных устройств камеры на порядок больше частоты загрузки камеры. В связи с этим для обеспечения равномерности потока выгруженных из камеры порций расчет моментов разгрузки камер производится после загрузки любой из камер или выхода любой из камеры из режима автоматического управления (при отклонении технологических параметров за допустимые пределы или аварийном состоянии механизмов разгрузочных устройств камер). Блок 4.управления осуществляет координацию обменом данных между вычислительным блоком 1, блоком 2 памяти, блоком 3 ввода данных и устройством 5 сопряжения с объектом. Вычислительный блок по заданной программе производит расчет момеН тов выдачи управляющих сигналов в следующем порядке. Для каждой камеры определяют возможное количество разгрузок на интервале от данного момента до момента ожидаемой ее загрузки путем давления разницы между количеством кокса в ней в данный момент и заданным (в программе) остатком на момент перед загрузкой на величину порции (константа программы) разгрузки, Для рассчитанного количества разгрузо.к определяются расчетные моменты времени начала схода порции (для каждой камеры). Рассчитанные количества порций пересчитываются для интервала от данного момента до момента ближай- шей загрузки путем умножения их на соотношение наименьшего интервала к интервалу до момента загрузки каждбй камеры. .Путем суммирования полученных значений определяется общее количество разгрузок, которое должно быть произведено на ленту сборндго конвейера до очередной загрузки в любую из камер. На основании предыдущего значения определяются интервалы между движением порций на конвейере и проверяется условие, чтобы эти интервалы были болыш или равны заданному времени на сход разгружаемой порции на конвейер после начала разгрузки. В противном случае вьщается сигнал оператору о необходимости изменить величину времени схода, т.е. увеличить выходное отверстие на выгрузочном лотке разгрузочного узла. После ввода с блока 3 ввода-вывода нового значения времени схода порции вычислительный блок 1 производит расчет моментов начала схода порции и затем прогноз руется ее номер камеры путем сопоставления найденных моментов с определенными ранее, в результате чего образуете график разгрузки камер. На основании полученного графика разгрузки определяется график выда- . чи команд, учитывающий время двиения порции по ленте конвейера от одной камеры до очередной и время схода порции с момента выдачи сигнала на начало разгрузки.
По-лученный график хранится в блоке -2 памяти до очередного расчета, затем обновляется новым.
Вычислительный блок 1 контролирует текущее время, для чего может fihiTb использован любой известный таймер, и в соответствии с графиком выдачи команд вьадает команды на начало разгрузки. Сигналы команд С вычислительного блока 1 выдаются через соответствующие номеру камеры выходы устройства 5 сопряжения с Объектом Начало разгрузки на выход блока б инициирования команд на разгрузку данной камеры.
Если камера готова к разгрузке, то на первом, втором и третьем входах блока б присутствуют сигналы, на входе блока б формируются сигналы, которые одновременно поступают в блок 7 управления разгрузочным устройством данной камеры и на соответствующий ее номеру вход Кавитация сигнала начала разгрузки устройства 5 сопряжения с объектом, по которому снимается сигнал с его выхода Начало разгрузки.
Готовность камеры к разгрузке определяется по сигналам, которые формируются в блоке 8 (при исходном положении затворов разгруаочнрго устройства), в блоке 9 контроля состояния основных механизмов блока камера-котел (при работе основного или вспомогательного дымососа, открытом состоянии соответствующего дроссельного клапана, работающим сборном конвейере и соответствующем положении перекидных клапанов), в блоке 10 (при допустимых значениях температурыциркулирующих га- зов на выходе из камеры, температуры потушенного кокса перед разгрузочным устройством, а также при отсутствии забивки желобов, .направляЮдих поток выгружаемого кокса из камер.).
Блок 7 управления разгрузочньм стро.йством формирует сигналы в опеделентэй временной последовательности, которые поступают на опредеенные входы приводов первого и втоого отсекающих затворов, промежуточного и нижнего затворов, а также на входы привода вибратора, обеспечивающего сход кокса через направляющие желоба на ленту сборного конвейера. Блокировка работы приводов осуществляется датчиками состояния затворов блока 8 контроля положения механизмов разгрузочных устройств. Одновременно с поступлением сигнала на открывание отсекающего затвора с выхода блока 7 сигнал поступает на установочные входы элементов 16-18 памяти (фиг. 2), приводя их в исходное состояние, и на вход запуска реле 13 времени, которое отсчитывает заданный интервал времени, на операции открывания и закры5 вания первого (аналогично второго.) отсекающего затвора. Факт открывания и затем закрывания фиксируется в элементе 16 памяти, на выходе которого сигнал свидетельствует о за10 вершении первой операции разгрузки. Если операция завершена в заданный с помощью реле 13 времени интервал, то на выходе реле сигнал отсутствует, в противном случае выдается сиг|5 нал, который поступает на вход Авария разгрузочного узла устройства 5 сопряжения с объектом, по которому данная камера исключается из нового цикла управления, а также может быть
Q включена тревожная сигнализация об аварии данной камеры. При нормальном ходепроцесса сигнал с выхода элемента 16 памяти поступает на вход запуска реле 14 времени, которое
5 контролирует заданное время на выполнение операций по открыванию-закрыванию нижнего затвора. Сброс реле 14 времени происходит по сигналу с выхода элемента 17 памяти, если на tero входы поступили сигналы с блока 8 контроля положения механизмов разгрузочных устройств об открывании и затем о закрывании нижйего затвора. Сигнал с элемента 17 памяти поступает также на вход запуска
5 реле 15 времени, которое контролирует заданное время на выполнение .операций по открыванию и затем закрыванию промежуточного затвора и включение вибратора. .
0 Как и при контроле первой операции, так и при контроле второй и третьей, в случае отклонения от заданной продолжительности на выполнение операций разгрузки, реле
5 14, 15 времени выдают сигнал на вход Авария разгрузочного узла блока 5 сопряжения с объектом. При нормальном выполнении последней операции- с выхода элемента 18
0 памяти поступает сигнал на вход сброса реле 15 времени и на Вход разгрузка закончена блока 5 сопряжения с объектом по которому вычислительный блок 1 корректируется
5 количеством кокса по данной камере регистрируемое (с разделением по камерам) в блоке 2 памяти, а блок 5 сопряжения с объектом выдает команду Начало разгрузки в следу ющую по временному признаку камеру. U
После очередной загрузки в какуюлибо из камер установки производится корректировка времен разгрузки всех работающих камер аналогич5 ным.образом.
Таким образом, устройство для управления разгрузкой кокса из камер обеспечивает равномерную и синхронизированную разгрузку всех камер при любых интервалах между поступлением кокса из печей коксовых батарей и равномерную раскладку разгруженных порций на сборном конвейере независимо от продолжительности и частоты выхода отдельных
камер из строя, что повышает его эффективность.
Экономический эффект достигается при этом за счет повышения производительности установки, за счет улучшения и стабилизации параметров вырабатываемого пара, и также за счет улучшения качества потушенного кокса
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления подвижным объектом | 1976 |
|
SU669375A1 |
| Программное устройство очередности обслуживания коксовых печей и затворов угольной башни | 1983 |
|
SU1110795A2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ РАДИАТОРОВ НА ГЕРМЕТИЧНОСТЬ | 1992 |
|
RU2049317C1 |
| Устройство для погрузки сыпучих материалов в железнодорожные транспортные средства | 1978 |
|
SU768735A1 |
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Коксовая рампа | 1987 |
|
SU1659448A1 |
| Устройство для определения количества кокса в камере установки сухого тушения | 1981 |
|
SU986094A1 |
| Устройство для загрузки бункеров стекольной шихтой | 1990 |
|
SU1724553A1 |
| Система для загрузки шихтовых материалов в доменную печь | 1983 |
|
SU1122700A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ РАЗГРУЗКИ КОКСА ИЗ КАМЕР УСТАНОВКИ СУХОГО ТУШЕНИЯ, содержащее блок управления, связанный с блоком ввода и вывода данных, вычислительным блоком и блоком памяти, блок сопряжения с объектом, соединенный с блоком памяти и с выходом блока управления, блок инициирования команд на разгрузку блок контроля .состояния основных механизмов, блок контроля технологических параметров, блок управления разгрузочными узлами, блок контроля положения механизмов , разгрузочньЬс узлов и датчик загрузки порЦий кокса в камеры, о тл и ч а .ю щ е е с я тем, что, с целью повышения надежности устройства в работе, оно дополнительно cdдержит блок контроля выполнения операций )азгрузки, входы блока инициирования, команд на разгрузку связаны с выходами блока контроля положения механизмов разгрузочных узлов, блока контроля технологических параметров, блока контроля состояния основных механизмов и блока сопряжения с объектом, соединенного с выходами датчика загрузки порций в ка(О меры и блока контроля выполнения операций разгрузки, подключенного входами к выходам взаимосвязанных блока контроля положения основных механизмов и блока управления разгрузочными узлами, соединенного с .выходом блока инициирования. ф СП 05
ф1/г.г
