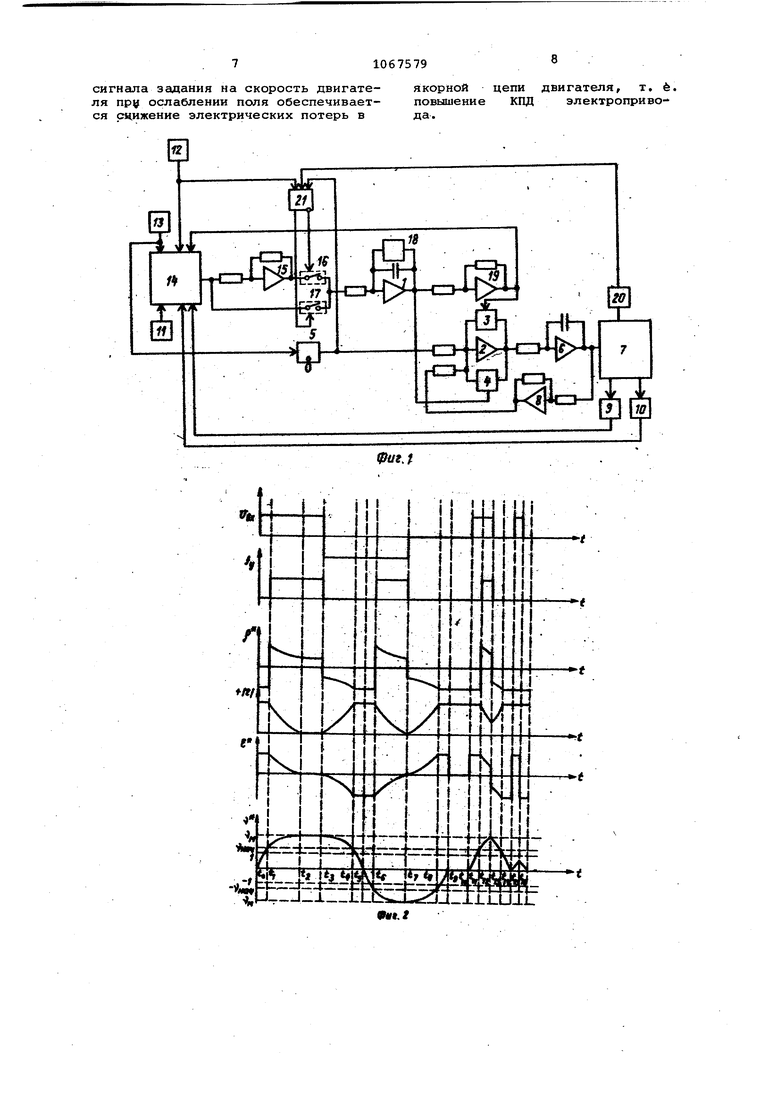
Изобретение относится к электротехнике и может быть использовано для формирования оптимальных тахрграмм двигателя постоянного тока независимого возбуждения на участке ослабления поля. Известно устройство для задания скорости двигателя, содержащее операционный усилитель с двухйолярнцм ограничением в цепи обратной связи и интегратор с парафазным выходом, соединенные последовательно и охваченные общей отрицательной обратной связью 13. Однако данное устройство не позволяет формировать сигнал задания на скорость, отличный от прямолиней ного. Наиболее близким техническим решением к изобретению является задаю щее устройство для электропривода, содержащее интегратор, усилитель с двумя блоками регулируемого ограничения в цепи обратной связи, к первому входу которого подключен источ ник задающего напряжения, выходной интегратор, выход которого подключен, к блоку управления электроприво дом и к первому инвертирукндему усилителю, выход которого соединен с вторым входс м усилителя 121. Однако известное устройство не позволяет формировать оптимальное, с точки зрения электрических потерь в якорной цепи, задание на скорость двигателя при ослаблении поля двига теля, поскольку изменение скорости по закону квадратичной параболы не является оптимальным в данном случа Оптимальное задание скорости это то которое позволяет сфоркдаровать тахо грамму работы Электропривода, обеспечивающую при перегреве двигателя снижение электрических потерь в яко ной цепи при увеличении времени цик ла работы на минимальную величину. Целью изобретения является повышение КПД электропривода путем формирования оптимального задания скоросии. Поставленная цель достигается тем, что в задающее устройство для электропривода, содержащее интегратор, усилитель с двумя блоками регу лируемого ограничения в цепи обратной связи, к первому входу которого подключен источник задающего напряжения, выходной интегратор, выход которого подключен к блоку управления электроприводом и к первому инвертирующему усилителю, вдход которого соединен с вторым входом усили теля , введены датчик статического тока двигателя, датчик магнитного потока, блок модуля Зсшания предель но допустимого ускорения, блок, моду ля задания начальной скорости, блок модуля задания максимальной скороети, подключенные к входам функционального преобразователя, последовательно соединенного с вторым инвертирукицим усилителем и первым управляемым ключом, шунтированными вторым управляемым ключом, блок однополярного нерегулируемого ограничения, третий инвертирующий усилитель, последовательно соединенные датчик скорости и блок логики, второй вход которого соединен с блоком модуля задания начальной скорости, третий вход - с выходом источника задающего напряжения, а выходы блока логики соединены с управляющими входами первого и второго управляемых ключей, выходы которых объеди- « иены и подключены через интегратор и третий инвертирукадий усилитель к шестому входу функционального преобразователя и к управляющек входу первого блока регулируемого ограничения, управляющий вход второго блока регулируемого ограничения подключен к выходу интегратора, в цепи обратной связи которого включен блок однополярного нерегулируе1«эго ограничения, а выход усилителя соединен с входом выходного интегратора. На ,фиг. 1 изображена блок-сХема устройства} на (г. 2 - временные диаграммы работы устройства} на фиг. 3 - один из возможных вариантов реализации блока логики, Задающее устройство для электропривода (фиг. 1 ) содержит интегратор 1, усилитель 2 с двумя блоками регулируемого ограничения 3 и 4 в цепи обратной связи, к первому входу которого подключен источник задающего Нсшряжения 5, выходной интегратор 6, выход которого подключен к блоку управления 7 электроприводом и к инвертирующему усилителю 8, выход которого соединен с вторым входом усилителя,2, датчик статического тока 9 двигателя, датчик магнитного потока 10, блок модуля задания предельно допустимого ускорения 11, блок модуля задания начальной скорости 12, блок модуля задания максимальной скорости 13, подключенные к входам функционального преобразователя 14, последовательно соединенного с инвертирующим усилителем. 15 и управляемым ключом 16, шунтированными управляемом ключом 17, блоч однополярного нерегулируемого ограничения 18, инвертирующий усилитель 19, последовательно соединенные датчик 20 и блок логики 21, второй вход которого соединен с блоком модуля задания начальной скорости 12, третий входс выходом-источника 3ajc(aK)ii(ero напряжения 5, а выходы блока логики 21 соединены с управлянхцими входами управляемых ключей 16 и 17, выходы которых объединены и подключены через .интегратор 1 и инвертирующий усилитель 19 к шестому входу функ. циональногр преобразователя 14 и к управляющему входу блока регулируер«эго ограничения 3, управляющий вход блока регулируемого ограничения 4 подключен к выходу интегратора 1, в цепи обратной связи которого включен блок однополярного нерегулируемого ограничения 18, а выход усилителя 2 соединен с входом выход ного интегратора 6. В качестве блока однополярного нерегулируемого ограничения 18 може быть применен стабилитрон. Блок логики 21 включает в себя однополяркые релейные элементы 22 25 (фиг, 3), причем первые два подключены к выходу источника задающего напряжения 5 (фиг, 11, а вторые два соответственно к блоку модуля з дания начальной скорости 12 перехода к криволинейному участку тахогра мл и датчику скорости 20, к котором также подключен блок выделения моду ля скорости ,26, последовательно сое динениый с релейным элементом 24, Выходы релейных элементов подключе-ны к логической схеме 27. Устройство работает следующим образом. В исходном состоянии, когда сигнал Uftx с выхода источника заданиего напряжения 5 равен нулю, функцио нальный преобразователь 14 по сигна лам от блока модуля задания максимальной скорости 13, блока модуля задания предельно допустимого ускор ния 11, блока модуля задания началь ной скорости 12 перехода к кривелинейному участку тахограммы, датчика магнитного потока 10 и датчика статического тока 9 формирует отрица-. тельный по знаку сигнал вида pn-|f f|JL C- l)f Р - задание на рывок двигателя л - коэффициент; f - магнитный поток двигателя; Uc - статический момент на валу двигателя; t - ускорение двигателя. Все величины в у{ авнении (1) зап саны в относительных единицах, где за базовые приняты номинальные значения величин. Коэффициент в уравнении (1 опре деляется как i O -VwuUl.nt VHiit) 2) VM-VM I f где VAj - максимальная скорость двигателя для данного режима работы; наг начальная скорость перехода, от прямоли неиного изменения скорости к крйволинейм ному; предельно допустимое для двигателя ускорение. Блок логики 21 по сигналам от блока модуля задания начальной скорости 12 перехода к криволинейному участку, датчика скорости 20 и источника задающего напряжения 5 формирует функцииуправления 5s и У равляекых ключей 16 и 17 такие,что выход функционального преобразователя 14 через инвертирукхций усилитель 15 и управляемый ключ 16 оказывается подалюченным к входу интегратора 1,а управляемой ключ 17 оказывается разомкнут. В результате этого на выходе интегратора 1 напряжение отрицательной полярности, представляющее собой сигнал пропорциональный ускорению, возрастает до величины, определяемой уровнем ограничения блока однополярного нерегулируемого ограничения 18. Уровень ограничения этого блока выбран таким, что его величина соответствует предельно допустимому для привода ускорению. Сигнал с выхода интегратора 1 поступает на блок регулируемого ограничения 4, включенного в цепь обратной связи усилителя 27 и через инвертирующий усилитель 19 на блок регулируемого ограничения 3. Кроме того, с выхода инвертирующего усилителя 19 сигнал подается на вход функционального гфеобразователя 14, осуществляя тем саилм положительную связь, за счет которой в исходном положении системы Обеспечивается .стабильное поддержание величины ( , Если в момент времени i.o {фиг, 2) от источника задающего напр Гжения 5 подать положительное напряжение Ujy величина которого пропорциональна величине , на вход усилителя 2, то на его выходе появляется сигнал задания на ускорение , ограниченный величиной уставки, подаваемой с выхода интертирующего усилителя 19 на блок регулируемого ограничения 3, Напряжение поступает на вход вьйсодного интегратора 6, на выходе которого сигнал задания на скорость меняется линейно с предельно допустимым ускорением, б момент времени -fc/i значение скорости достигает величины ,при этом происходит переключение в блоке логики 21, управляемый ключ 16 размыкается, а управляемый ключ 17 замыкается. Это приводит к тому, что
выход функционального преобразователя 14 прямо подключается на вход интегратора 1, что приводит к началу формирования на его выходе и соответственно на выходе инвертирующего усилителя 19 оптимального зако на изменения ускорения, описанного уравнением . С1) «
Таким образом, изменяя уровень ограничения на блоке регулHpyeNroro ограничения 3, на выходе усилителя 2 получают оптимальный закон изменения задания на ускорение . , что приводит к формированию на выходе выходного интегратора 6 оптимального закона изменения задания на скорость V ..
В момент времвкя i сигнал на выходе инвертирующего усилителя 19 достигает нулевого значения, а сигнал задания на скорость достигает максимальной величины. При этом величина pHBKaj не достигает нулевого значения,- однако за счет действия блока однополярного нерегулируемого ограничения 18 сигнал на выг ходе интегратора 1 и инвертирующего усилителя 19 поддерживается равным нулю, обеспечивая режим работы с установившимся заданием на скорость на интервале Ьг. - -fcj .
В момент времени -Ьь от источника задающего напряжения 5 поступает команда на реверс. Блок логики 21 производит переключение управляемых ключей 16 и 17 (16 - замыкается, а 17 - размыкается) и на выходе интегратора 1 происходит нарастание сигнала ускорения по оптимальному за-т кону..Поскольку при этом на выходе усилителя 2 сигнал задания на ускорение меняет свой знак, то вступает в действие блок регулируемого ограничения 4.. Начинается процесс торможения по оптимальной кривой.
Когда значение скорости достигает величины VHAt -(момент времени ) величина ускорения достигает значения пр и устройство переходит в -режим, аналогичный описанному для исходного состояния, отличающийся тем, что при этом происходит уменьшение сигнала задания на скорость с. йредельно допустикнм замедлением до момента времени ts.
В дальнейшем работа происходит аналогично описанному выше. На интер вале -ts - i показана работа устройства без участка с установившимся заданием на скорость, а на ийтервале -tq --fcxo - исходное .состояние устройства.
Устройство позволяет также производить аварийное торможение с сохранением симметричного характера кривой задания на скорость на участке торможения. ДиаграмАю работы в .
этом рехсиме показаны на интервале
Ав
Аналогичный режим аварийного отключения, но для скоростей меньших t показан На интервале . .
Таким образом, устройство позволяет формировать сигнал задания на оптимальное изменение скорости двигателя при ослаблении поля.
Применение блока однополярного нерегулируемого ограничения 18 в цепи обратной связи интегратора 1 обеспечивает постоянство знаков на выходе интегратора 1 и инвертирующего усилителя 19, что позволяет поддерживать неи-зменные по знаку установки на блоках регулируемого ограничения 3 и 4. При этом обеспечивается правильная работа устройства переходе от режима задания на разгон к режиму задания на торможение, поскольку изменение знака ускорения не оказывает влияния на работу устройства.
Для пояснения работы блока 21 логики на фиг. 3 приведена схема возможного выполнения этого узла.
В исходном состоянии с выхода релейного элемента 24 на вход логической схекы 27 поступает сигналнулевого уровня 0,что формирует на ее .выходе сигнал f ) , равный 1, а на другом выхоДе логической схемы 27 сигнал %, равный О. Это состояние сохраняется независимо от знаков сигналов UjY и V до тех пор; пока {у} Меньше
При разгоне в положительном нгшравлении и работе.на установившейся скорости (интервал времени :fe 4.3) нз выходах: релейных элементов 22 и 25 сигнал 1. D момент времени -tiV, больше VhAt на илходе релейного элемента 24 появляется сигнал В результате на трех входах логической схемы J7 имеем сигналы 1, что изменяет состояние выходных сигналов логической 27, при этом 1 равно 1, а lij равно О.,
В момент времени -Ь изменяется знак и , что вызывает появление на выходе релейного элемента 22 сигнала О. Это вызывает переключение сигналов на выходах логической cxeivb 27 (f4 - равен О, а Ту равен 1). В момент времени -i сигнал на выходе релейного элемента 24 становится равным О, что, не изменяет состояние сигналов f и Ц . При работе в противоположном направлении интервал -fc ) работа логической схемы 27 ансшогич|1а
Таким образом, за счёт формирования оптимаспьного закона изменения
сигнала задания на скорость двигателя пру ослаблении поля обеспечивается снижение электрических потерь в
якорной цепи двигателя, т, ё. повышение КПД электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1988 |
|
SU1515313A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ | 1994 |
|
RU2061316C1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |

ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРОПРИВОДА, содержащее интегратор, усилит ель с двумя блокаки регулируемого ограничения в цепи обратной связи, к первому входу которого подключен источник задакхцего напряжения, выходной интегратор, выход которого подключен к блоку управления электр оприводом и к первому инвертирующему усилителю, выход которого соединен с вторым Bxqдом усилителя, отличают еёс я тем, что, с целью повышения КПД электропривода, в него введены датчик статического тока двигателя, датчик магнитного потока, блок модуля з адания предельно допустимого ускорения, блок модуля згдания начальной скорости, блок модуля задания максимальной скорости, подключенные к входам функционального преобразователя, последовательно соединенного с вторым инвертирующим усилителем и первым управляеАслм ключом, шунтированными вторым управляемым ключом, блок однополярного нерегулируемого ограничения, третий инвертируюьшй усилитель, последовательно соединенные датчик скорости и блок логики, второй вход которого соединен с блоком модуля задания начальной скорости третий вход .с выходом источника задающего напряжения, а выходов блока логики сое(Л динены с управляющими входами первого и второго управляеАих- клк1чей, с выходы которых объединены и подключены через; интегратор и третий инвертирующий усилитель к шестому входу функционального преобразователя, и к управляющему входу первого блока регулируемого ограничения, упра:влякяций вход второго блоке рагулируемого ограничения подключен к выхоо ду интегратора, в цепи обратной связи которого включен блок однсполяр ел ного нерегулируемого ограничения, а выход усилителя соединен с входом iвыходного интегратора. со
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лебедев Е.Д | |||
| й.др | |||
| Управление вентильными электроприводами постоянного тока | |||
| М., Энергия, 1970 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Задающее устройство для электропривода | 1975 |
|
SU606195A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
