Изобретение относится к устройствам для укладки эластичных листов в стопу и может быть использовано в производстве эластичных листов.
Известно устройство для укладки эластичных листов в стопу, содержащее механизм вертикального перемещения листов, опорно-раскатывающие ролики, контактирующие с платформой для листов, датчик предельных положений листов и узел управления скоростью 1.
Недостатком известного устройства является невысокая эффективность укладки листов.
Целью изобретения является повышение эффективности укладки листов.
Цель достигается тем, что устрой(;тво для укладки эластичных листов в стопу, содержащее механизм вертикального перемещения листов, опорно-раскатывающие ролики, контактирующие с платформой для листов, датчик предельных положений листов и узел управления скоростью, содержит дополнительный датчик предельных положений листов, формирователь скорости, узел регулирования торможения, блок управления, элемент ИЛИ, триггер, узел управляющих реле, при этом датчики предельных положений листов установлены с возможностью взаимодействия с укладываемыми листами посредством подпружиненных рычагов и электрически через элемент ИЛИ подключены к первому входу триггера, выход которого связан с первым входом узла управляющих реле, второй вход которого подключен к первому выходу блока управления, соединенного вторым выходом с вторым входом триггера, третий выход блока управления связан с первым входом узла регулирования торможения, вторые входы которого через контакты узла управляющих реле подключены к соответствующим выходам формирователя скорости, выходы узла регулирования торможения соединены с узлом управления скоростью, связанным первым выходом с входом блока управления, причем второй выход узла управления скоростью подключен к третьему входу узла регулирования торможения
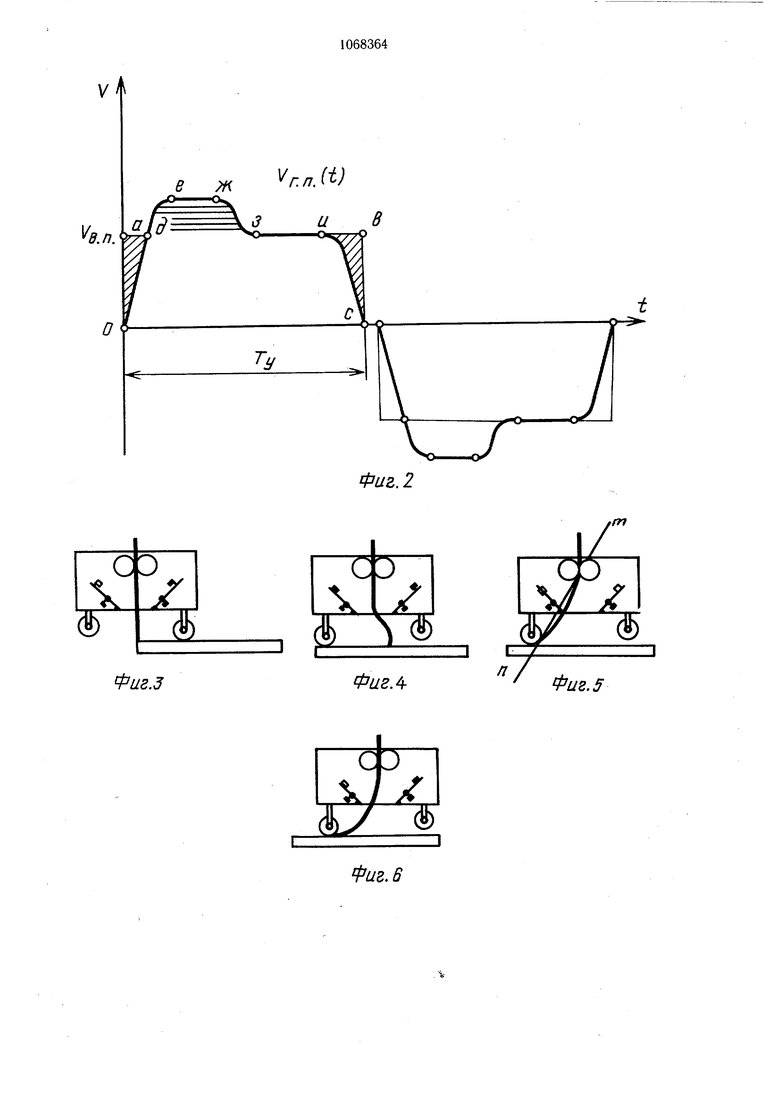
На фиг. 1 приведена кинематическая схема устройства для укладки эластичных листов; на фиг. 2 - временная диаграмма изменения скорости горизонтального перемещения листов формирователем скорости в процессе укладки листа; на фиг. 3-6 - положения отдельных звеньев устройства в процессе укладки листа; на фиг. 7 - структурная схема цепи управления приводом механизма горизонтального перемещения.
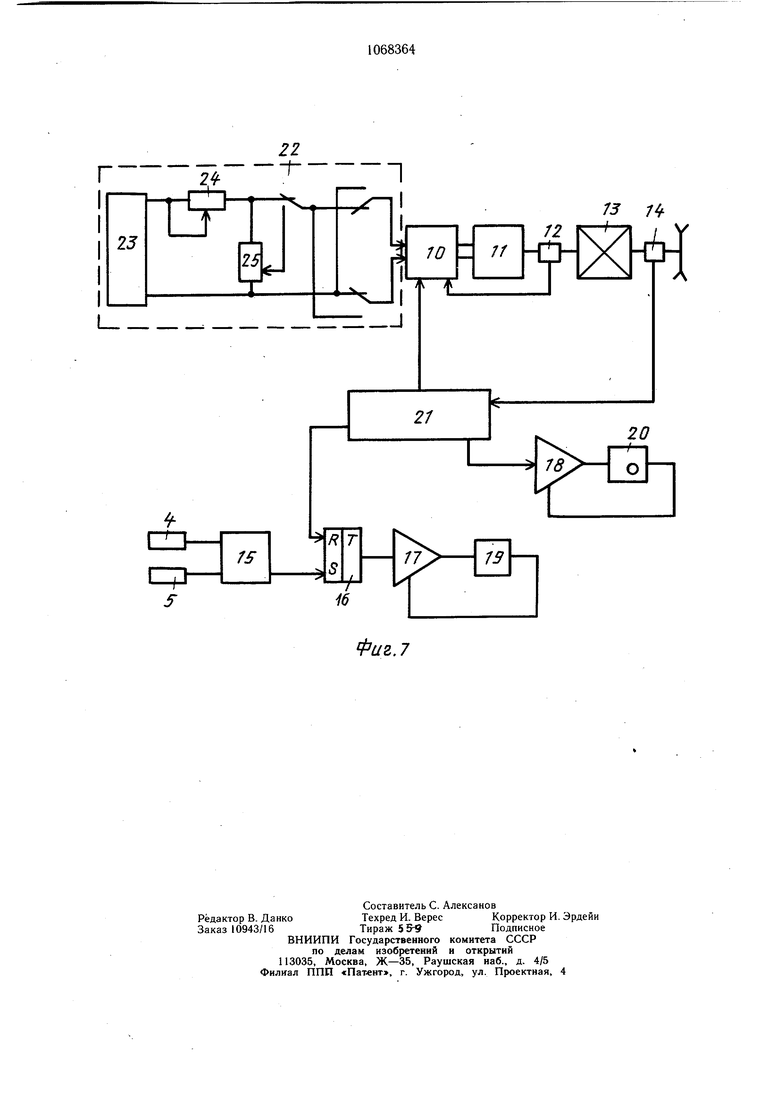
Устройство для укладки эластичных листов в стопу содержит подающие ролики механизма 1 вертикального перемещения листов, опорно-раскатывающие ролики 2 и 3, датчики 4 и 5 предельных положений листов 5, рычаги 6, пружины рычагов 7, платформу 8 и механизм 9 горизонтального перемещения листов, обеспечивающий относительное перемещение подающих роликов механизма 1 и платформы 8, привод которого состоит из узла 10 регулирования торможения, электродвигателя 11, датчика 12
скорости, редуктора 13, датчика 14 горизонтального перемещения, элемента ИЛИ 15, триггера 16, усилителей 17 и 18, электромагнитных реле 19 и 20, блока21 управления, формирователя 22 скорости, состоящего из
источника 23 стабилизированного питания и делителя напряжения на сопротивлениях 24 и 25.
Узел управления скоростью содержит электродвигатель 11, датчик 12 скорости, редуктор 13 и датчик 14 горизонтального перемещения.
Узел управляющих реле содержит усилители 17, и 18 и электромагнитные реле 19 и 20, при этом датчики 4 и 5 предельных положений листов установлены с возможностью взаимодействия с укладываемыми листами посредством подпружиненных рычагов 6 и электрически через элемент ИЛИ 15 подключены к первому входу триггера 16, выход которого связан с первым входом узла управляющих реле, второй вход которого подключен к первому выходу блока 21 управления, соединенного вторым выходом с входом триггера 16, третий выход блока 21 управления связан с первым входом узла 10 регулирования торможения, вторые входы которого через контакты узла управляющих реле подключены к соответствующим выходам формирователя 22 скорости, выходы узла 10 регулирования торможения соединены с узлом управления скоростью, связанного первым выходом с входом блока 21 управления, причем второй выход узла управления скоростью подключен к третьему входу узла 10 регулирования торможения.
Цосле включения устройство работает следующим образом.
В исходном положении выход подающих роликов механизма 1 находится над краем стопы листов. Один из опорно-раскатывающих роликов 2 или 3 находится на стопе листов, другой - вне стопы (фиг. 3). Укладываемый лист вертикально перемещается подающими роликами 1 и при касании его платформы 8 (этот момент определяется датчиком) из-блока 21 управления поступает сигнал в стабилизированный источник 23 питания для подачи напряжения на делитель 24 и 25. Надряжение снимается с сопротивления 25 и через нормально замкнутые контакты электромагнитных реле 19 и 20 подается на вход узла 10, который в зависимости от величины и полярности подаваемого напряr жения заставляет вращаться электродвигатель 11 в определенном направлении,и через редуктор 13 осуществляется горизонтальное перемещение листа. Датчик 14 входит в контур стабилизации скорости и выдает в управляющее устройство информацию о величине горизонтального перемещения. В начале укладки на участке плавного разгона (точки о. д, е, фиг. 2), укладка листа происходит с нарастающим перегибом в направ лении горизонтального перемещения (фиг. 4, до точки д), так как скорость вертикального перемещения на этом участке больше скорости горизонтального перемещения листа. Начиная с точки д, перегиб листа уменьщаегся. В момент, когда опорно-раскатывающий ролик 2 находится над стопой листов, он опускается и прижимает укладываемый лист к стопе. На участке движения (точки е,ж} скорость горизонтального перемещения листа«больше скорости вертикального перемещения листа, поэтому в некоторый момент времени этот перегиб исчезает совсем (фиг. 3) и начинается укладка листа, при кotopoй укладываемый лист стремится к линии ш-п (фиг. 5), соединяющей поверхности подающих и опорно-раскатывающих роликов 2.
Укладываемый лист этой линии никогда не достигнет, потому, что он встретит на своем пути рычаг 6 и, преодолев усилие пружины 7, сместит его на некоторую величину, необходимую для срабатывания датчика 4 предельного положения, сигнал с которого через элемент ИЛИ 15 и триггер 16 поступает на вход усилителя 17, на выходе которого включена катушка электромагнитного реле 19, которая перебрасывает контакты. Тогда напряжение будет сниматься с нижней части сопротивления 25, которое задает скорость горизонтального перемещения равной скорости вертикального перемещения листа. Дальнейщий процесс укладки происходит с, равными скоростями (точки з,и, фиг. 2). В конце укладки листа от датчика 14 проходит сигнал в блок 21, который выдает сигнал в узел 10 для перевода электродвигателя 11 в режим торможения (точкам, фиг. 2 Скорость горизонтального перемещения листа начинает падать, лист начинает отходить от рычага 6, стремясь занять вертикальное положение (фиг. 6). В момент, когда выход подающих роликов механизма 7 займет предельное горизонтальное положение над платформой 8, горизонтальное перемещение прекращается. Рычаг 6 под действием пружины 7 возвращается в исходное положение, и
из блока 21 поступает сигнал на триггер 16 и устанавливает его в исходное состояние, а это приводит к переброске соответствующего контакта.
После прихода очередного листа из блока 21 поступает сигнал на вход усилителя 18, на выходе которого включена катущка электромагнитного реле 20, которая перебрасывает соответствующие контакты, и напряжение с формирователя 22 скорости поступает на вход узла 10 противоположной полярности. Укладка его происходит в противоположную сторону, цикл повторяется, но работать будет датчик 5 предельного положения.
Для качественной укладки листа необходимо, чтобы величина горизонтального перемещения была равна величине вертикального перемещения листа за время движения Ту длиной 1я с постоянной скоростью вертикального перемещения Увп - При этом необходимо, чтобы процесс укладки происходил без натяжения листа на всем протяжении укладки и без перегибов в направлении перемещения в конце укладки листа. Эти условия выполняются тогда, когда суммарная площадь криволинейных треугольников (точки а,о,д и в,с,и) равна площади криволинейной трапеции (точки д.е,ж,з, фиг. 2) или
Ve.n-Ty fVp.)dt,
где Vr. цсйзависимость (Скорости горизонтального перемещения листа от времени за период укладки листа Ту длиной 1л .
Датчики 4 и 5 предельных положений устанавливаются таким образом, чтобы выполнялись эти условия, т. е. они устанавливают точку ж, которая определяет площадь криволинейной трапеции (точки д,е,ж,з. фиг. 2).
Предлагаемое устройство позволяет укладывать отдельные листы с высоким качеством укладки при работе с различным технологическим оборудованием, что расщиряет его технологические возможности. Это дает возможность применить устройство для укладки эластичных листов в стопу при автоматизации различных технологических операций, освобождая обслуживающий персонал от тяжелой, монотонной и неквалифицированной работы.
Использование изобретения позволяет по.высить эффективность укладки листов.
в,п.
V
Фиг.З
Фиг. 2
т
сэ
у
V
Фиг Л
Фиг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки эластичного материала в стопу | 1981 |
|
SU996306A1 |
| Система управления укладкой в стопу эластичных листов | 1985 |
|
SU1265698A1 |
| Система для управления устройством укладки эластичных листов | 1986 |
|
SU1376062A1 |
| Устройство для штабелирования и разборки штабеля листовых изделий | 1988 |
|
SU1708724A1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА БУМАЖНЫХ ЛИСТОВ | 1993 |
|
RU2106690C1 |
| Устройство для укладки эластичного материала в стопу | 1988 |
|
SU1574525A1 |
| Система для сортировки листовых материалов | 1980 |
|
SU1007760A1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| Устройство для укладки эластичных листов | 1983 |
|
SU1148827A2 |
| Манипулятор и способ управления им | 1990 |
|
SU1782720A1 |
УСТРОЙСТВО ДЛЯ УКЛАДКИ ЭЛАСТИЧНЫХ ЛИСТОВ В СТОПУ, содержащее механизм вертикального перемещения листов, спорно-раскатывающие ролики, контактирующие с платформой для листов, датчик предельных положений листов и узел управления скоростью, отличающееся тем, что, с целью повышения эффективности укладки листов, оно имеет дополнительный, датчик предельных положений листов, формирователь скорости, узел регулирования торможения, блок управления, элемент ИЛИ, триггер, узел управляющих реле, при этом датчики предельных положений листов установлены с возможностью взаимодействия с укладываемыми листами посредством подпружиненных рычагов и электрически через элемент ИЛИ подключены к первому входу триггера, выход которого связан с первым входом узла управляющих реле, второй вход которого подключен к первому выходу блока управления, соединенного вторым выходом с вторым входом триггера, третий выход блока угГравления связан с первым входом узла регулирования торможения, вторые входы которого через контакты узла управляющих реле подключены к соответствующим выходам формирователя скорости, выходы узла регулирования торможения соединены с узлом управления скоS ростью, связанным первым выходом с входом блока управления, причем второй выход узла управления скоростью подключен к третьему входу узла регулирования торможения. О5 00 со 05 
vL/
Ж
Фиг. 6 73
Фиг.7 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU152869A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
