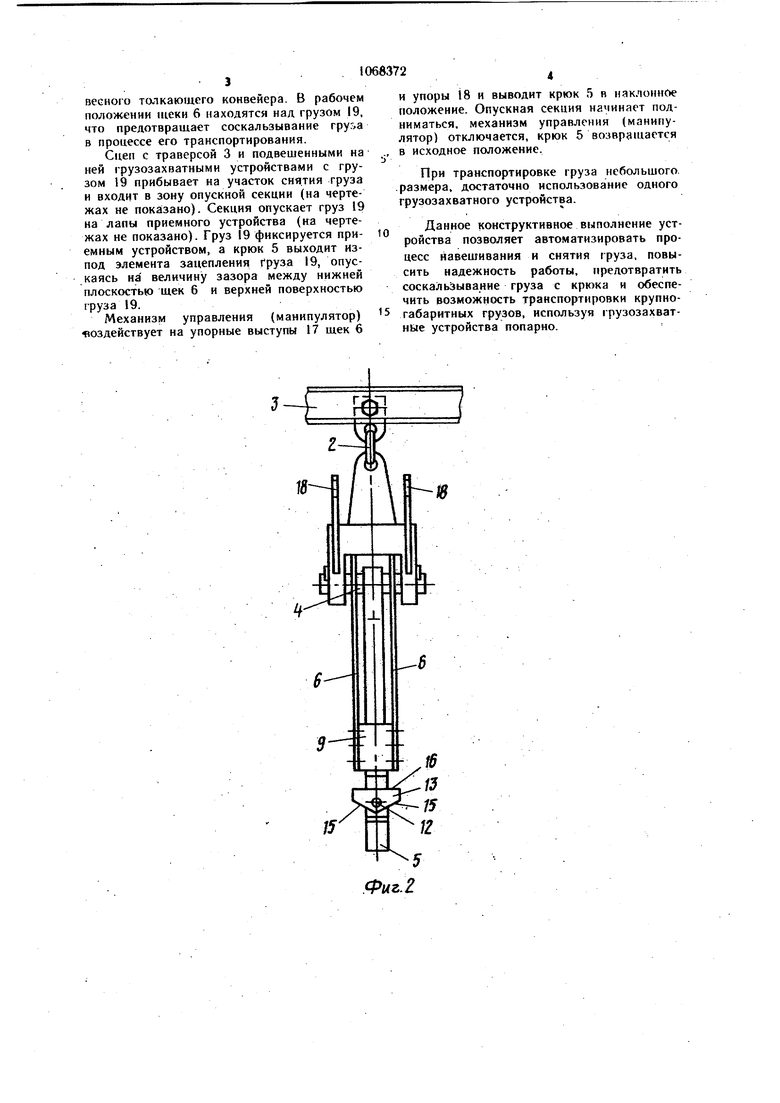
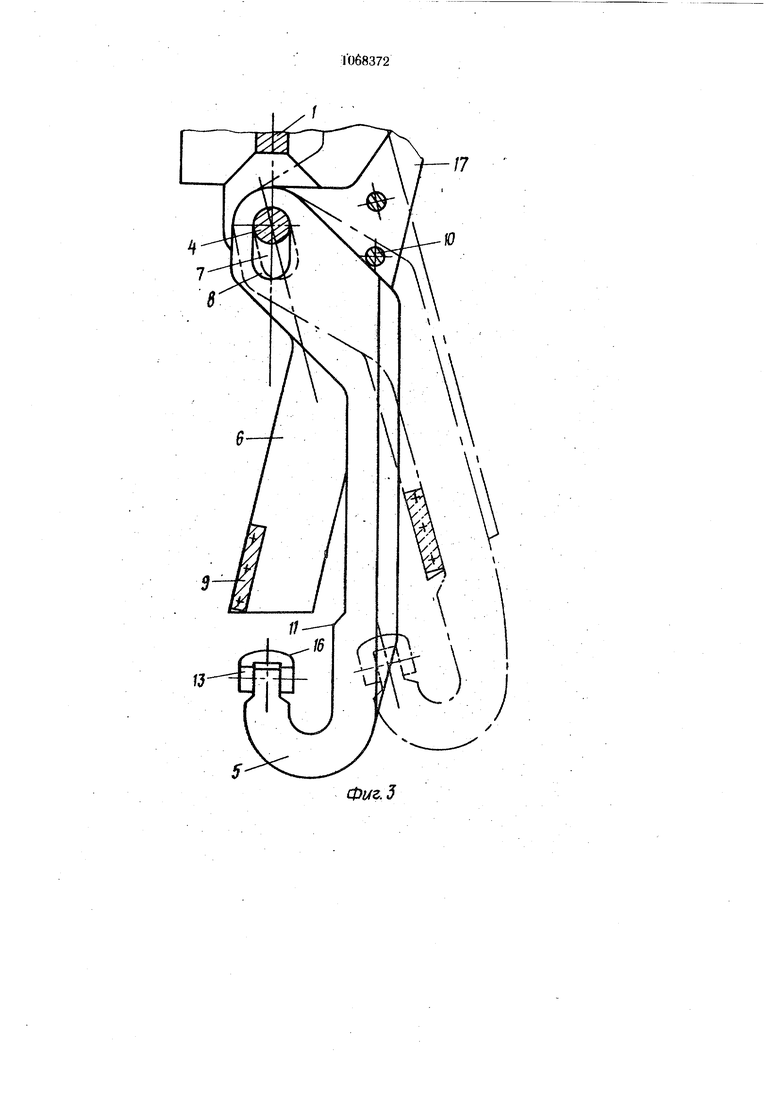
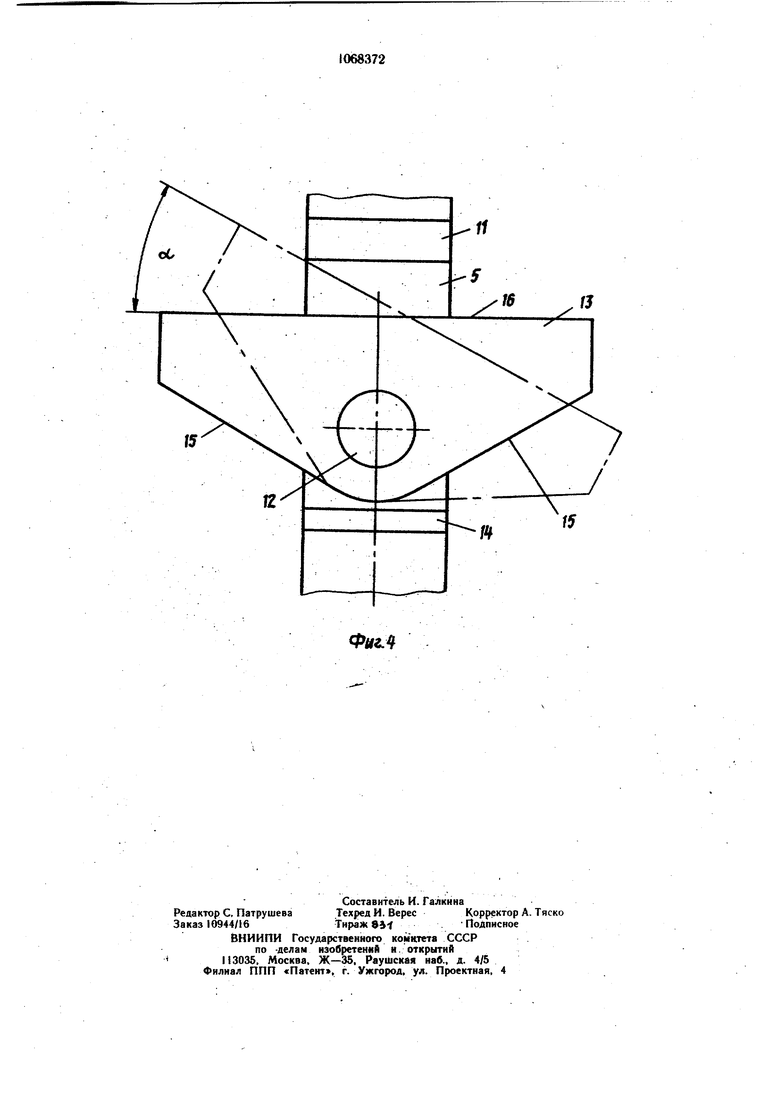
Изобретение относится к нодъемно-тр нс портному оборудованию, а именно к автоматическим захватным устройствам для перемещения штучных грузов. Известно захватное устройство, содержащее П-образный корпус со щеками, нааешенными на установленную в нем ось, и крюком, закрепленным между щеками (1). Недостатком этого захватного устройства является низкая надежность при подъеме и перемещении груза. Целью изобретения является повышение надежности. Указанная цель достигается тем, что грузозахватное устройство, содержащее П-образный корпус со щеками, навещенными на установленную в нем ось, и крюком, закрепленным между щеками, снабжено закрепленным .на боковой части корпуса упором и расположенными в нижней и.верхней частях щек и соединяющими их ограничителями поворота крюка, который выполнен с уступом на поверхности, обращенной в сторону его зева на уровне нижнего конца нижнего ограничителя поворота, при этом в верхней части крюка и щек выполнены пазы для навешивания на упомянутую ось, а щеки выполнены с упорными выступами на их верхних концах. На фиг. 1 схематично изображено грузозахватное устройство, общий вид; на фиг. 2 - грузозахватное устройство, & Rсбоку; на фиг. 3 - крюк, общий вид; на фиг. 4 - качающаяся опора, общий вид. Грузозахватное устройство . содержит П-образный корпус 1, который посредством кольца 2 навешен на траверсу 3. Корпус I имеет пазы (не показаны), в которые уста новлена ось 4. На ось 4 шарнирно навешены крюк 5 и щеки 6, причем крюк 5 закреплен между щеками 6. В верхней части крюка 5 выполнен паз 7 для навешивания на ось 4, а в верхней части щек 6 выполнены пазы 8, аналогичные пазу 7. Щеки 6 жестко соединены между собой расположенным в нижней их части ограничителем 9 поворота крюка и расположенным в верхней их части ограничителем 10 поворота крюка, а на поверхности средней части крюка, обращенной в сторону его зева, выполнен уступ II, расположенный на уровне нижнего конца нижнего ограничителя 9 поворота для расположения щек 6 и крюка 5 в исходном положении в одну линию., чтобы не мешать навеижванию и снятию груза. На свободном конце |.юга крюка 5 на беи 12 установлена качающая1-я otiopa 13, для чего имеются симметри.чные скосы 14, а на опоре 13 выполнены соответственно подкосы 15. Опорная поверхность И) качающейся опоры 13 скруглена, что обеспечивает транспортировку крупногабаритных грузов по трассе, расположенной на разных уровнях с использованием одновременно двух гру юзахватных устройств. Шеки 6 выполнены с упорными выступами 17 на их верхних концах для взаимодействия с механизмом управления, например манипулятором, при повороте вокруг оси 4.. В свободном ненагруженном состоянии при отсутствии воздействия механизма управления, например манипулятора, щеки 6 под действием Собственного веса занимают исходное положение (фиг. 1), при зтом верхние ограничители 10 поворота взаимодействуют с крюком 5. - Устройство снабжено закрепленным на боковой части корпуса 1 упором 18, которыи удерживает грузозахватное устройство от смещения в поперечном направлении при воздействии на него механизма управления (манипулятора). Упор 18 расположен симметрично положению упорных выступов 17 щек 6 в момент навешивания или снятия груза 19. Устройство работает следующим обраОМ. Сцеп подвесного толкающего конвейера с -траверсой и подвешенными на ней двумягрузозахватными устройствами подается в. зону опускной секции. Два захвату необходимы длн навешивания крупногабарит„ого груза 1.9, например платформы автоприцепа. (Опускная секция на чертежах не показана). В это время устройства находятся в исходном положении (т. е. вертикально вниз). При опускании секции механизм управления (манипулятор) воздействует на упорные выступы 17 щек 6 и упоры 18. При этом щеки б ограничителями поворота крюка 9 захватывают крюк 5 и, поворачиваясь на оси 4, приводят грузозахватные устройства в наклонное положение, т. е. крюк 5 и щеки 6 поворачивают ся на некоторый угол относительно своего вертикального положения и образуют одну линию. Захваты входят в зону расположения груза 19 (платформа автоприцепа). Механизм управления (манипулятор), получая команду на приведение крюка 5 в рабочее положение, отпускает упорные выступы 17 щек 6, и крюк 5 занимает рабочее положение, удерживаясь в нем ограничителем 10 поворота, который контактирует с крюком 5. Когда крюк в наклонном положении, элемент груза 19, за который происходит зацепление, находится выше уровня качающейся опоры 13 крюка 5. При подъеме опускной секции крюк 5 входит под элемент зацепления груза 19, который зависает на грузозахватных устройствах и поднимается в положение, необходимое для подачиего на трассу пол
весного толкающего конвейера. В рабочем положении щеки 6 находятся над грузом 19, что предотвращает соскальзывание в процессе его транспортирования.
Сцеп с траверсой 3 и подвешенными на ней грузозахватными устройствами с грузом 19 прибывает на участок снятия груза и входит в зону опускной секцни (на чертежах не показано). Секция опускает груз 19 на лапы приемного устройства (на чертежах не показано). Груз 19 фиксируется приемным устройством, а крюк 5 выходит изпод элемента зацепления Груза 19, опускаясь на величину зазора между нижней плоскостью щек 6 и верхней поверхностью груза 19.
Механизм управления (манипулятор) воздействует на упорные выступы 17 щек 6
и упоры 18 и выводит крюк 5 в наклонное положение. Опускная секция начинает подниматься, механизм управления (манипулятор) отключается, крюк 5 возвращается в исходное положение.
При транспортировке груза небольшого .размера, достаточно использование одного грузозахватного устройства.
Данное конструктивное выполнение устройства позволяет автоматизировать процесс йавешивания и снятия груза, повысить надежность работы, предотвратить соскальзывание груза с крюка и обеспечить возможность транспортировки крупногабаритных грузов, используя 1рузозахватнЫе устройства попарно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1791334A1 |
| СЕКЦИОННОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 2000 |
|
RU2198129C2 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Грузозахватное устройство для грузов с жесткими проушинами | 1982 |
|
SU1084227A1 |
| Саморасцепляющееся захватное устройство | 1981 |
|
SU992387A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2010 |
|
RU2453491C1 |
| Замок для стропа | 1983 |
|
SU1197976A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, содержащее П-образный корпус с.Ь 13 ;: .щеками, навешенными на установленную в нем ось, и крюком, закрепленным между щеками, отличающееся тем, что, с целью повышения надежности, оно снабжено закрепленным на боковой части корпуса упором и расположенными в нижней и верхней частях щек и соединяющими их ограничителями поворота крюка, который выполнен с уступом на поверхности, обращенной в сторону его зева на уровне нижнего конца нижнего ограничителя поворота, при этом в верхней части крюка и щек выполнены пазы для навешивания на упомянутую ось, а щеки выполнены с упорными выступами на их верхних концах. СЛ О5 оо со N3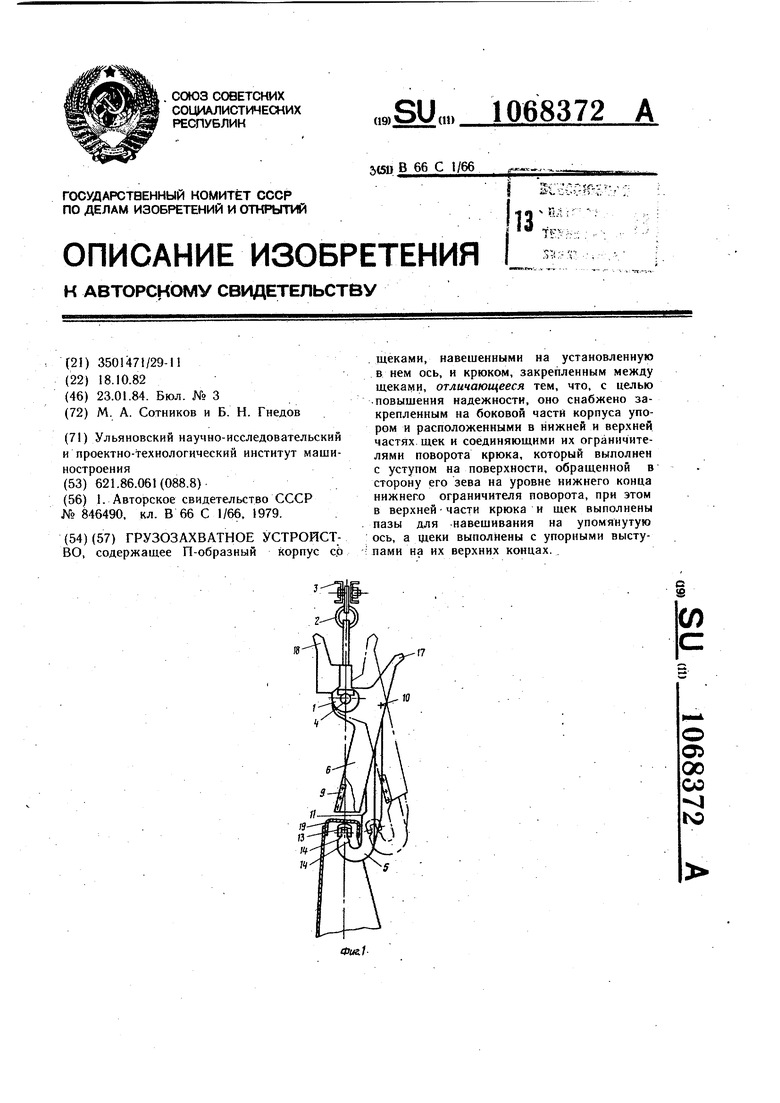
W
Л
/5
№::0
,5
/г
.Фиг2
0
/7
Фиг. 5
Фиъ.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захватное устройство для грузовС МОНТАжНыМи пЕТляМи | 1979 |
|
SU846490A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
