Изобретение относится к подъемно- транспортному оборудованию, а именно к автоматическим устройствам для захвата и перемещения штучных грузов.
Известно захватное устройство для грузов с монтажными петлями 1, содержащее корпус, выполненный из двух щек, в котором неподвижно, с помощью винтов, установлен крюк, шарнирно прикрепленный посредством оси предохранитель, соединенный с корпусом пружиной.
Недостатком устройства является низкая надежность работы, так как наличие пружины в устройстве не обеспечивает надежность работы. Кроме того.устройство не позволяет автоматизировать- процесс захвата и транспортировки груза.
Известно грузозахватное устройство 2, содержащее П-образный корпус в виде жестко соединенных щек. Корпус имеет пазы, в которые установлена ось, На эту ось подвижно навешены щеки. Между щеками размещен крюк.
Недостатком известного устройства является недостаточно надежная фиксация груза, а это ведет к снижению надежности работы устройства в целом.
Целью предполагаемого изобретения является повышение надежности работы за счет обеспечения надежного захвата, фиксации и транспортировки груза.
Указанная цель достигается тем, что в устройство шарнирно на оси установлены жестко соединенные друг с другом дополнительные параллельные щеки, размещенные зеркально-симметрично основным щекам. Кроме того на крюке ниже основной оси в одной с ней вертикальной плоскости установлена дополнительная ось, на которой шарнирно установлен рычаг П-образной формы, центр тяжести которого расположен ниже дополнительной оси, при этом выступы для дистанционного управления выполнены в верхних частях рычага и дополнительных щек, а упоры закреплены на рычаге.
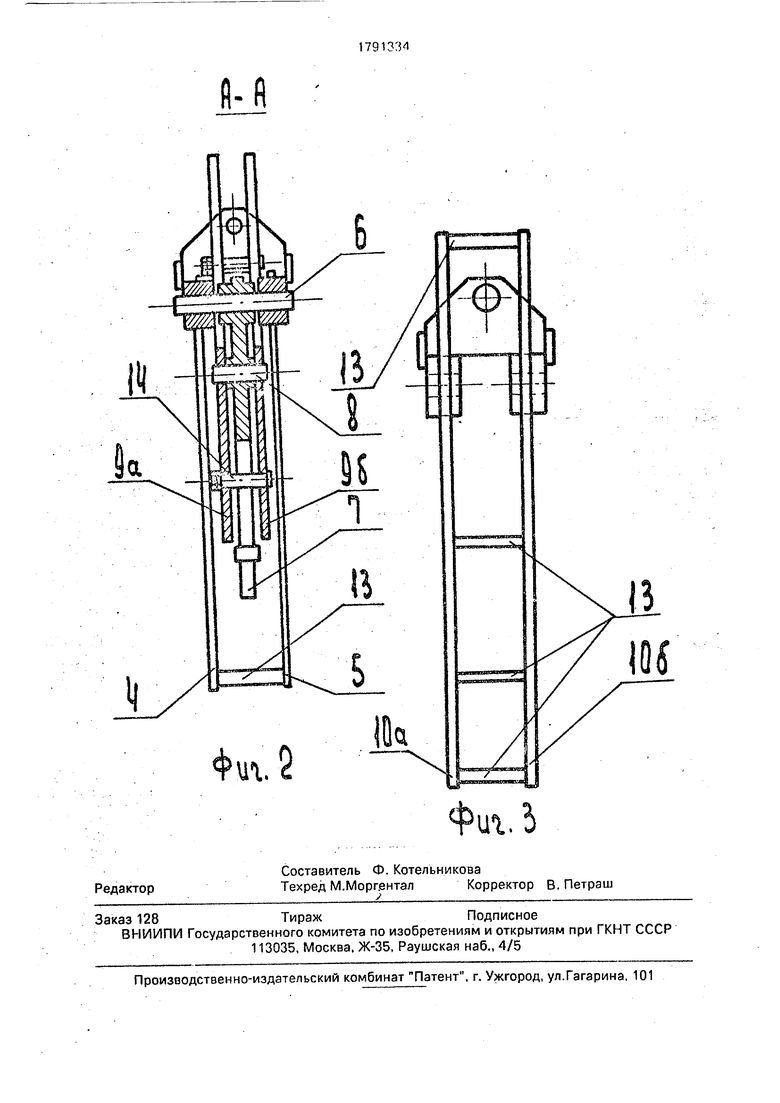
Изобретение поясняется чертежами, где на фиг,1 изображен общий вид грузозахватного устройства;.на фиг.2 - разрез А-А на фиг.1; на фиг.З - неразъемная П-образ- ная конструкция дополнительных щек.
Устройство содержит П-образный корпус 1, который посредством кольца 2 навешен на траверсу 3 сцепа опускной секции (не показан). П-образный корпус 1 представляет собой неразъемную жесткую конструкцию (фиг.2), боковыми сторонами которого являются параллельно закрепленные основные щеки 4 и 5 (фиг.2). В щеках 4 и 5 предусмотрены пазы, в которые установлена горизонтальная ось 6, на которую шарнирно навешивается крюк 7. В свою очередь в крюке 7 устанавливается параллельно оси бив одной с ней вертикальной плоскости
дополнительная ось 8. На дополнительной оси 8 шарнирно навешен рычаг П-образной формы 9, который так же составлен из двух пластин 9а и 96. При установке рычага П-образной формы 9 следует учитывать, что его
0 центр тяжести должен располагаться ниже дополнительной оси 8, в противном случае не произойдет самозапирания рычага 9. Кроме тоге устройство снабжено жестко соединенными друг с другом дополнительны5 ми параллельными щеками 10а и 106, шарнирно установленными на упомянутой выше оси 6 зеркально-симметрично основ- ным щекам 4 и 5. В верхних частя;: П-образного рычага 9 и дополнительных щек 10а и
0 106 выполнены выступы (см. фиг.1) для дистанционного управления грузозахватным устройством посредством системы рычагов 11 манипулятора. Дополнительные щеки 10а и 10б и основные щеки 4 и 5 П-образного
5 корпуса 1 выполнены со скосами,обеспечивающими гарантированный плавный заход . крюка 7 под груз 12. Щеки 4, 5, 10а и 106 соединены распорками 13. Пластины 9а и 96 П-образного рычага 9 соединены между со0 бой упорами 14, которые служат для ограни- . чения отклонения крюка 7.
В исходном положении, при отсутствии груза 12, система рычагов 11 манипулятора не воздействует на рычаг 9 и дополнитель5 ные щеки 10а и 106. Благодаря жесткой П- образной конструкции грузозахватное устройство под действием собственной массы занимает вертикальное, без смещения в поперечном направлении, положение.
0 Устройство работает следующим образом.
Рассмотрим работу по захвату и транспортировке, например, платформы автоприцепа по трассе с использованием
5 одновременно двух грузозахватных устройств. Сцеп подвесного толкающего конвейера с траверсой 3 и подвешенными на ней двумя грузозахватными устройствами подается в зону действия манипулятора. В
0 этот момент от сцепа поступает сигнал на манипулятор, который своей системой рычагов 1 начинает воздействовать на дополнительные щеки 10а и 106 и рычаг 9 П-образной формы. При этом дополнитель5 ные щеки 10а и 106 и основные щеки 4 и 5 П-образного корпуса 1 начинают ориентировать груз 12 строго з вертикальном положении. Рычаг 9 повора тается на оси 8 и своим упором 14 воздействует на крюк 7, располагая его таким образом, чтобы элемент захвата крюка 7 оказался ниже элемента груза 12, за который и осуществляют зацепление. После этого система рычагов 11 манипулятора получает команду на расхождение, т.е. система рычагов 11 манипу- перестает воздействовать на дополнительные щеки 10а и 106 и рычаг 9. dpi этом крюк 7 под действием собствен- ной массы займет вертикальное положение. При подъеме секции крюк 7 входит под элемент зацепления груза 12 и груз 12 зависает на крюке 7 грузозахвата. Рычаг 9, освобожденный от воздействия рычага 1 манипулятора, под действием собственной массы, поворачиваясь на оси 8, займет так же по- ложзние, близкое к вертикальному, ограни- чивэемое упором 14. и при этом автоматически запрет груз 12 на крюке 7 и предотвратит соскальзывание груза 12 с
крю
а 7 в процессе его транспортировки. 20
Затем сцеп с грузозахватными устройства- платформой кузова автоприцепа (груз ювисшей на крюках 7, поднимается и мает положение, необходимое для подзго на трассу подвесного толкающего
ми и
12),
зани
ачи
конвейера-.
Груженый сцеп по трассе толкающего зйера прибывает на участок съема в опускной секции. Система рычагов 11
конв зону
ману пулятора получает команду на их схождение и начинает воздействовать на дополните. 9 по
УСЛОЕ
та ис стве.
опусч ится, груз 12 фиксируют на приемном устройстве, крюк 7 выходит из-под элемента Зсцепления. Рычаги 11 манипулятора внов( получают команду на расхождение. При ; том дополнительные Щеки 10а и 106, рыча 9 и крюк 7 занимают первоначальное исхо;ное положение, груз 12 оказывается
тьные щеки Юа и 106 и рычаг 9. Рычаг зорачиваётся вокруг оси 8, создавая ия для свободного выхода грузозахва- иксации груза 12 на приемном устрой- После того, как секция полностью
5
0
5
0
0
0
5
зафиксированным на приемном устройстве. Опускная секция поднимается и грузозахватные устройства занимают исходное положение.
По сравнению с прототипом грузозахватное устройство обладает следующими преимуществами:
-.большая надежность, поскольку обеспечивается надежная фиксация груза на крюке;
- осуществляется ориентация груза для обеспечения надежного захвата;
- надежная фиксация груза и возможность ориентации груза в свою очередь обеспечивает надежную транспортировку, обеспечивают безопасность при работе с захватом;
- возможность автоматизации захвата, фиксации, транспортировки груза. Формула изобретения Грузозахватное устройство, содержащее П-образный корпус с параллельными щеками, закрепленную в корпусе горизонтальную ось, шарнирно установленный на оси между щеками крюк, упоры для взаимодействия с крюком и выступы для дистанционного управления, отличающееся тем, что, с целью повышения надежности захвата и фиксации груза, оно снабжено жестко соединёнными друг с другом дополни- тельными параллельными щеками, шарнирно установленными на упомянутой выше оси зеркально-симметрично основным, дополнительной осью, закрепленной на крюке ниже основной оси в одной с ней вертикальной плоскости, и шарнирно установленным на дополнительной оси рычагом П-образной формы, центр тяжести которого расположен ниже дополнительной оси, при этом выступы для дистанционного управления выполнены в верхней чарти рычага и дополнительных щек, а упоры закреплены на рычаге.
й-ft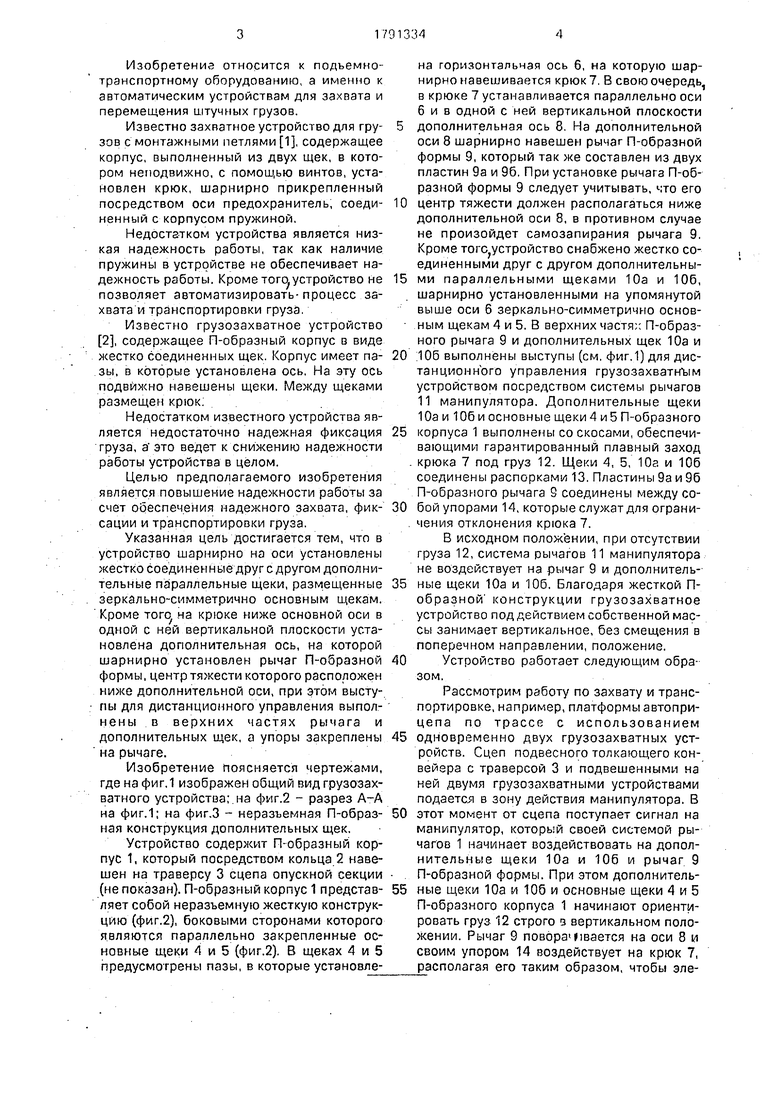
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1068372A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| Грузозахватный орган | 1987 |
|
SU1555256A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| Грузозахватное устройство | 1980 |
|
SU931656A1 |
Использование: для автоматического захват i грузов, преимущественно крупнога- баритн ых, при их подъеме и транспортировке, Сущность изобретения: устройство .. . . -. -., . - - 3 содержит П-образный корпус 1 с параллельными щеками 4, установленный между щеками на оси 6 крюк 7, П-образный рычаг 9, центр тяжести которого располагается ниже оси 8 его установки, и дополнительные параллельные щеки 10. Верхние части рычага 9 и дополнительных щек 10 выполнены с выступами для дистанционного управления посредством рычагов 11 манипулятора, которые при наведении устройства на груз разведены в стороны. Дополнительные щеки 10 вместе с основными 4 ориентируют груз в вертикальном положении. После зацепления груза крюком 7 рычаг 9 освобождается от воздействия рычага 1.1 манипулятора и поворачивается на оси 8, запирая груз. 3 ил. Ё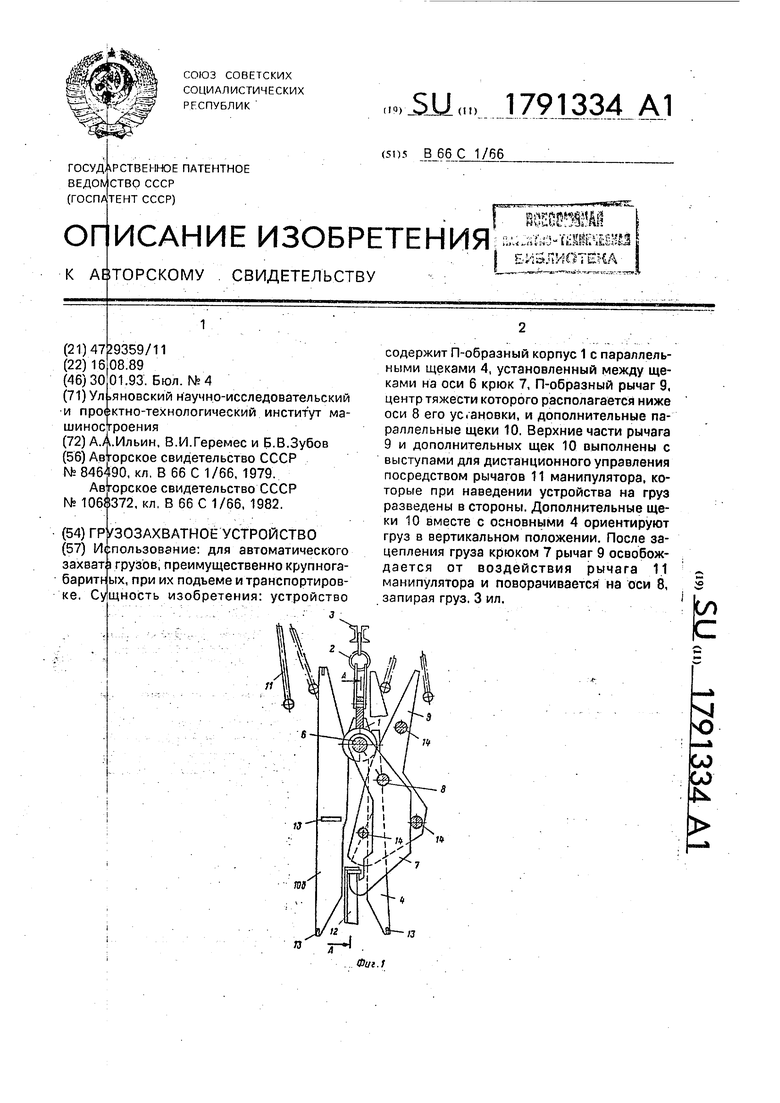
| Способ осахаривания древесных опилок | 1922 |
|
SU846A1 |
| Бюл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Электромагнитный счетчик электрических замыканий | 1921 |
|
SU372A1 |
