Фиг.2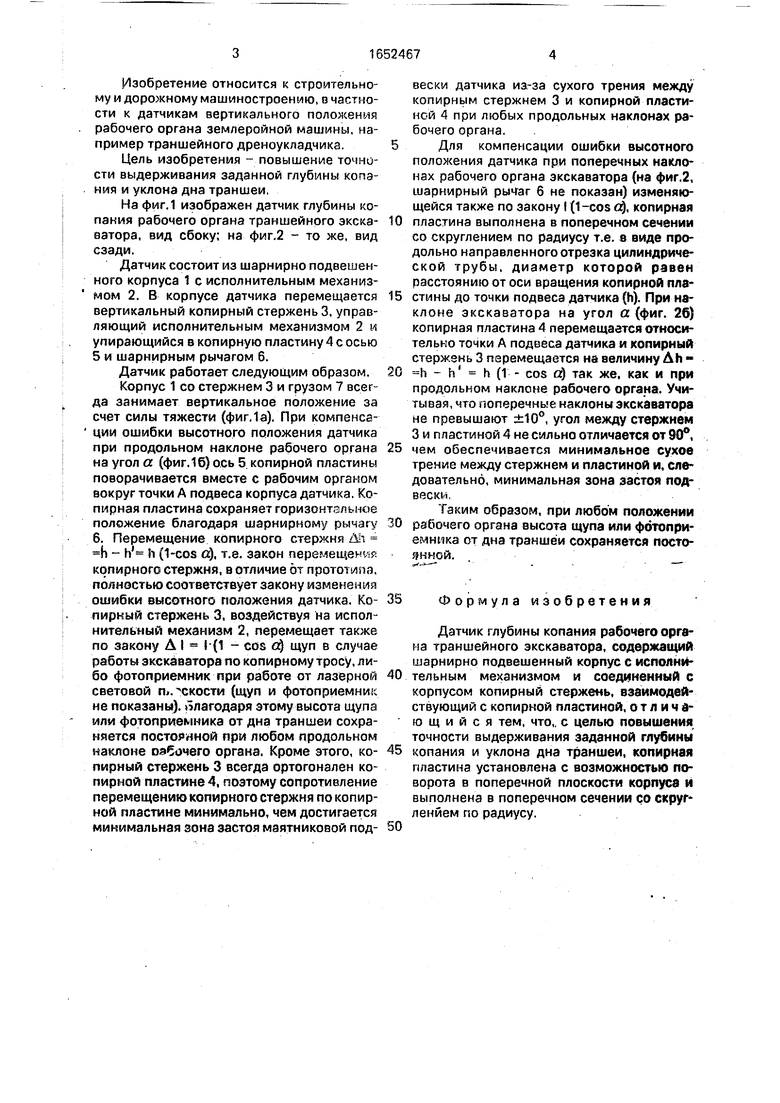
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1970 |
|
SU269800A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Датчик глубины копания | 1974 |
|
SU560031A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| Устройство для автоматического выдерживания заданного уклона дна щели к щелерезу непрерывного действия | 1979 |
|
SU874904A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Датчик глубины копания землеройной машины непрерывного действия | 1978 |
|
SU740903A1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
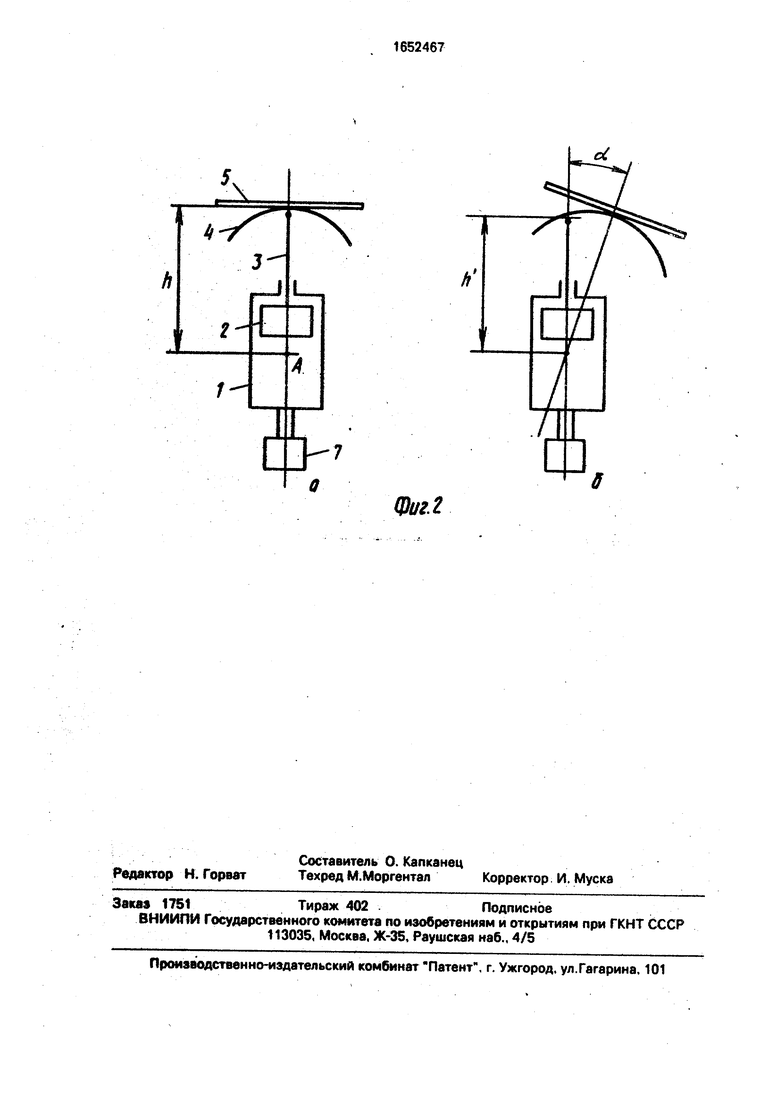
Изобретение относится к строительному и дорожному машиностроению. Цель - повышение точности выдерживания заданной глубины копания и уклона дна траншеи. Датчик состоит из шарнирно подвешенного корпуса 1 с исполнительным механизмом 2. В поперечной плоскости корпуса 1 установлена с возможностью поворота копирная пластина 4, выполненная в поперечном се-, чении со скругленном по радиусу, С корпусом 1 соединен копирный стержень 3, взаимодействующий с пластиной 4. За счет силы тяжести корпус 1 со стержнем 3 и грузом 7 всегда занимает вертикальное положение. При продольном или поперечном наклоне рабочего органа ось 5 пластины 4 поворачивается вместе с рабочим органом вокруг точки подвеса корпуса 1 датчика. Пластина 4 сохраняет горизонтальное положение благодаря шарнирному рычагу или скруглению по радиусу. Стержень 3. воздействуя на исполнительный механизм 2, перемещает щуп или фотоприемник. Благодаря этому высота щупа или фотоприемника от дна траншеи сохраняется постоянной при любом продольном наклоне рабочего органа, 2 ил. (Л С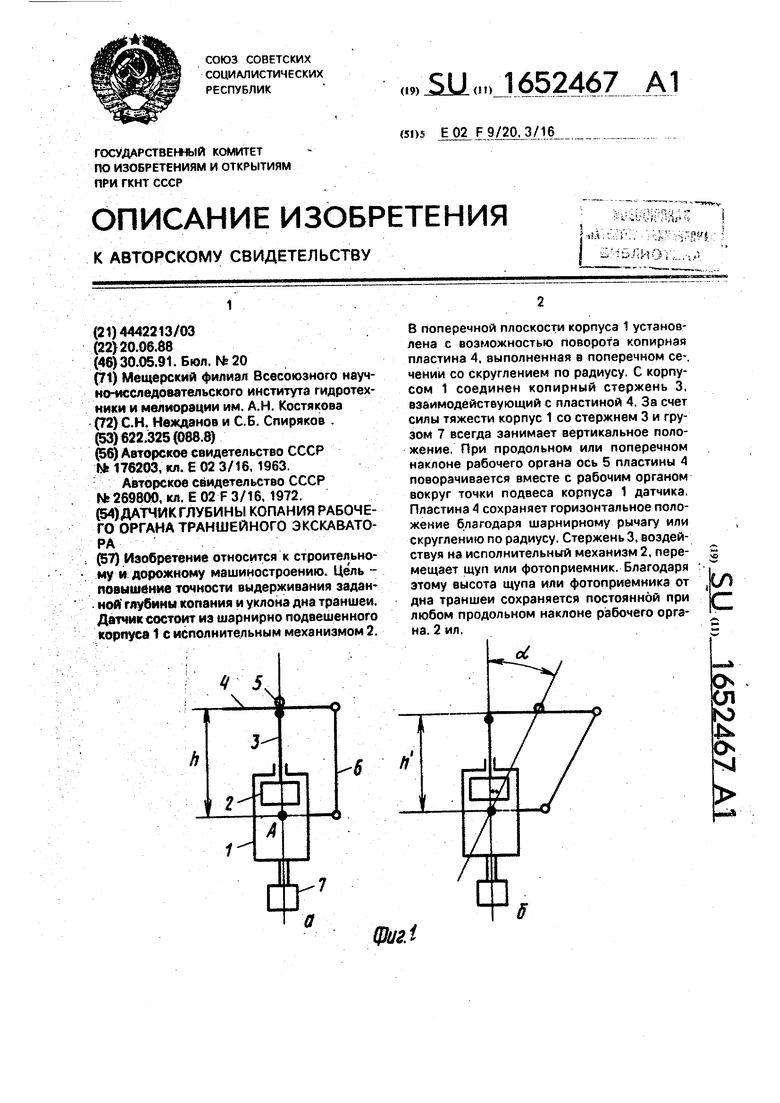
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ ГЛУБИНЫ КОПАНИЯ К МНОГОКОВШОВОМУ ЭКСКАВАТОРУ | 0 |
|
SU176203A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 0 |
|
SU269800A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
