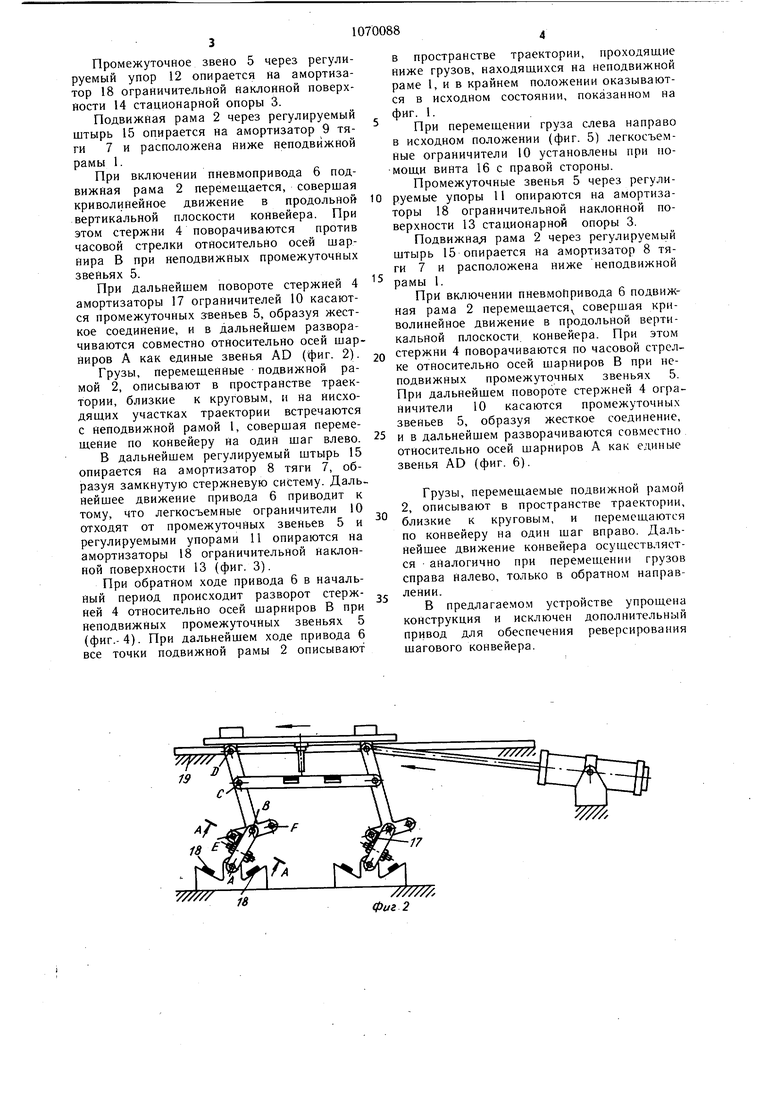
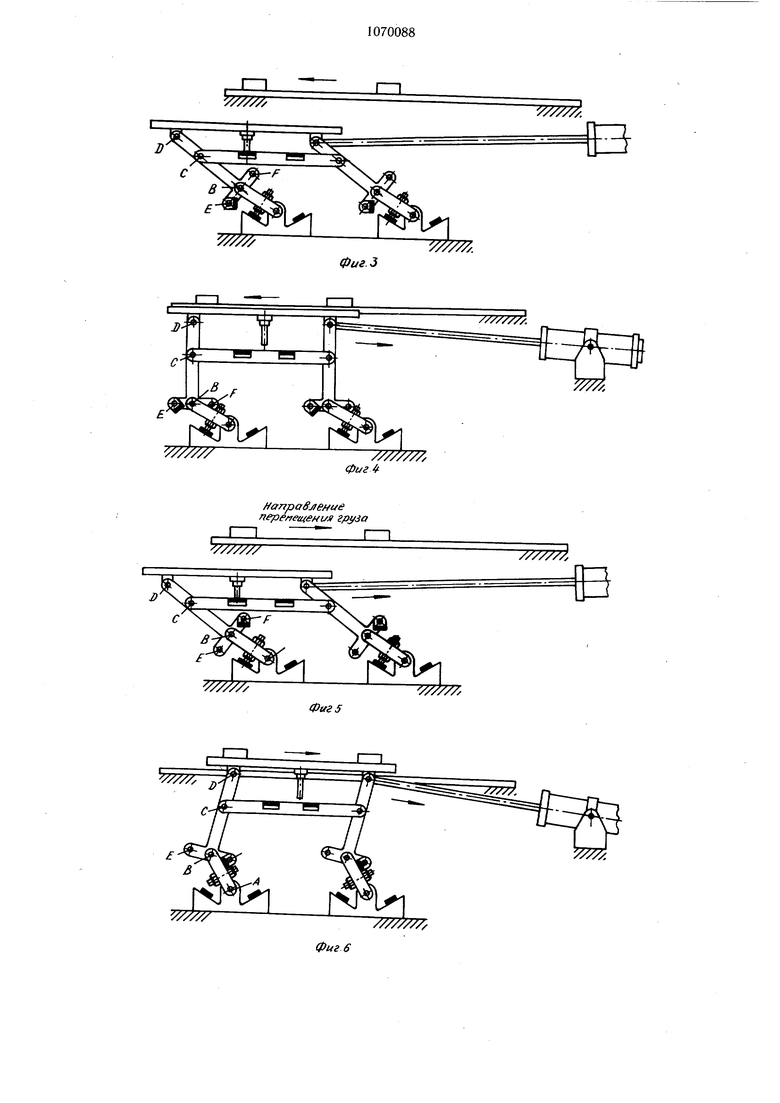
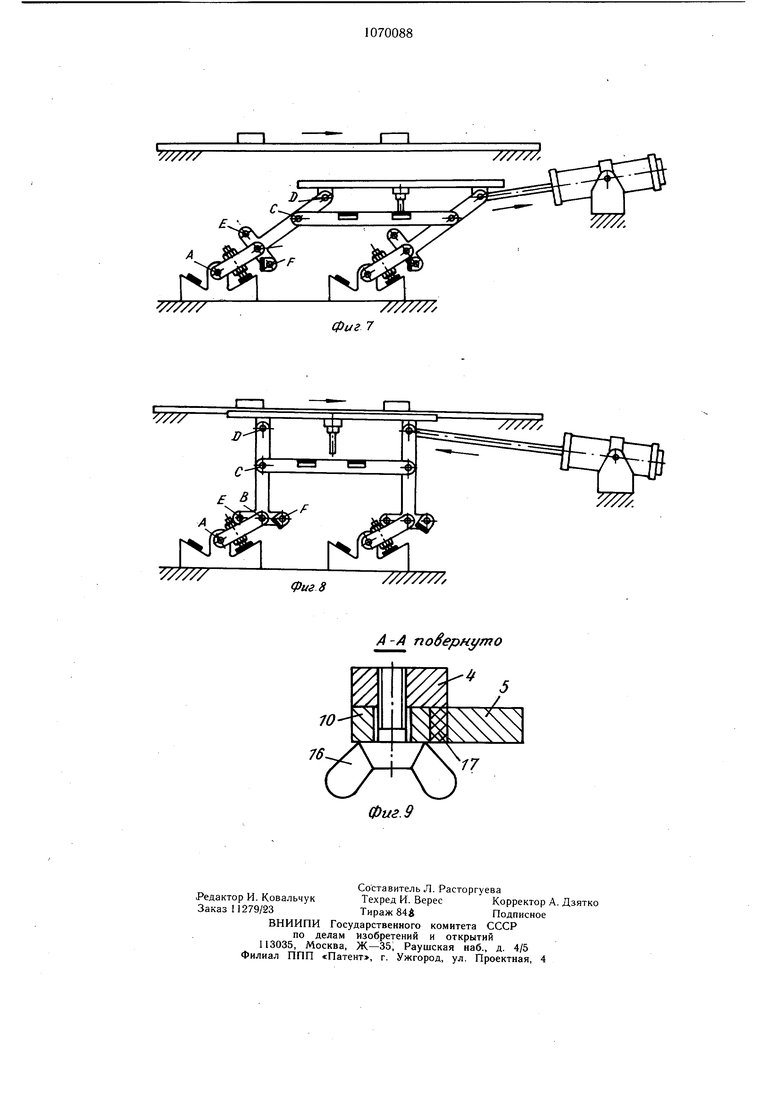
Изобретение отйосится к подъемно-транспортным устройствам, в частности к шаговым конвейерам для перемещения штучных грузов с одной рабочей позиции на другую. Известен шаговый реверсивный конвейер содержащий подвижную раму с шарнирно укрепленными на ней стержнями, неподвижную раму с направляющими в виде роликов для поддержания подвижной рамы, профилированные опоры, установленные с возможностью взаимодействия со стержнями, и силовой привод 1. Недостаток данного конвейера - ударное взаимодействие элементов конструкции в момент касания подвижной рамы о ролики при рабочем ходе конвейера и в момент соприкосновения концов стержней с профилированными опорами при обратном ходе, что снижает долговечность конвейера. Кроме того, существует возможность попадания посторонних тел в раскрываюш.ийся шарнир стержень-опора, что приводит к снижению надежности работы конвейера. Наиболее близким по технической сущности к предлагаемому является шаговый реверсивный конвейер, содержащий установленную на основании неподвижную раму, подвижную раму с шарнирно закрепленными на ней стержнями, расположенные на основании опоры для стержней и привод возвратно-поступательного перемещения подвижной рамы 2. Недостатком известного конвейера является сложность его конструкции, обусловленная тем, что для обеспечения реверсирования перемещения груза использован дополнительный привод. Цель изобретения - упрощение конструкции конвейера. Указанная цель достигается тем, что в шаговом реверсивном конвейере, содержащем установленную на основании неподвижную раму, подвижную раму с шарнирно закрепленными на ней стержнями, расположенные на основании опоры для стержней и привод возвратно-поступательного .перешения подвижной рамы, каждый стержень шарнирно связан с опорой посредством промежуточного звена с двусторонним упором и имеет ограничитель поворота стержня, установленный с возможностью перестановки его по разные стороны относительно промежуточного звена и взаимодействия с последним, причем каждая опора выполнена с двумя ограничительными наклонными поверхностями, а каждый двусторонний упор установлен с возможностью взаимодействия с соответствующей ограничительной наклонной пове|эхностью, при этом стержни связаны между собой посредством тяги, а подвижная рама имеет штырь, установленный с возможностью взаимодейстВИЯ с тягой. Причем тяга имеет амортизаторы, установленные с возможностью взаимодействия со штырем. Кроме того, каждая ограничительная наклонная поверхность имеет амортизатор. Каждый ограничитель поворота стержня имеет амортизатор. На фиг. 1-4 схематически изображен реверсивный шаговый конвейер, крайние и промежуточные положения за один полный цикл работы при направлении перемешения груза справа налево; на фиг. 5- 8 - то же, слева направо; на фиг. 9 - разрез А-А на фиг. 2 (крепление съемного амортизируюшего упора). Реверсивный шаговый конвейер содержит неподвижную раму 1, подвижную раму 2, кинематически связанную со стационарными опорами 3 посредством двух шарнирйо соединенных и последовательно расположенных элементов-. стержней 4 и промежуточных звеньев 5. Подвижная рама 2 шарнирно соединена с приводом 6 возвратно-поступательного пере.мещения. Стержни 4 соединены между собой шарнирно тягой 7, снабженной двумя амортизаторами 8 и 9, а каждый из них имеет в своей нижней части легкосъемный ограничите.ть 10 поворота. стержней 4, установленный с возможностью перестановки его по разные стороны относительно промежуточного звена 5 и взаимодействия с последним. Промежуточные звенья 5 снабжены двусторонними регулируемыми упорами 11 и 12. Каждая из стационарных опор 3 выполнена с двумя ограничительными наклонными поверхностями 13 и 14, а каждый двусторонний упор 11 или 12 установлен с возможностью взаимодействия с соответствуюшей ограничительной наклонной поверхностью 13 или 14. В нижней части подвижной рамы 2 закреплен регулируемый по длине штырь 15, установленный с возможностью взаимодействия с тягой 7, точнее с амортизаторами 8 и 9, закрепленными на тяге 7. Крепление ограничителей 10 поворота стержней 4 осуществляется винтом 16. При этом для смягчения удара каждый ограничитель 10 поворота стержня 5 и каждая ограничительная наклонная поверхность 13 и 14 имеют соответственно амортизатор 17 и 18. Неподвижная рама 1 и опоры 3 установлены на основании 19. Шаговый реверсивный конвейер работает следующим образом. При перемещении груза справа налево в исходном положении (фиг. 1) легкосъемный ограничитель 10 установлен при помощи винта 16 с левой стороны нижней части стержня 4 в очке Е так, что при взаимодействии с промежуточным звеном 5 (фиг. 2) он соприкасается с ним всей поверхностью. Промежуточное звено 5 через регулируемый упор 12 опирается на амортизатор 18 ограничительной наклонной поверхности 14 стационарной опоры 3. Подвижная рама 2 через регулируемый штырь 15 опирается на амортизатор 9 тяги 7 и расположена ниже неподвижной рамы 1. При включении пневмопривода 6 подвижная рама 2 перемещается, совершая криволинейное движение в продольной вертикальной плоскости конвейера. При этом стержни 4 поворачиваются против часовой стрелки относительно осей шарнира В при неподвижных промежуточных звеньях 5. При дальнейшем повороте стержней 4 амортизаторы 17 ограничителей 10 касаются промежуточных звеньев 5, образуя жесткое соединение, и в дальнейшем разворачиваются совместно относительно осей шарниров А как единые звенья AD (фиг. 2). Грузы, перемешенные подвижной рамой 2, описывают в пространстве траектории, близкие к круговым, и на нисходящих участках траектории встречаются с неподвижной рамой 1, совершая перемещение по конвейеру на один шаг влево. В дальнейшем регулируемый штырь 15 опирается на амортизатор 8 тяги 7, образуя замкнутую стержневую систему. Дальнейшее движение привода 6 приводит к тому, что легкосъемные ограничители 10 отходят от промежуточных звеньев 5 и регулируемыми упорами 11 опираются на амортизаторы 18 ограничительной наклонной поверхности 13 (фнг. 3). При обратном ходе привода 6 в начальныи период происходит разворот стержней 4 относительно осей щарниров В при неподвижных промежуточных звеньях 5 (фиг.-4). При дальнейшем ходе привода 6 все точки подвижной рамы 2 описывают в пространстве траектории, проходяш.ие ниже грузов, находящихся на неподвижной раме 1, и в крайнем положении оказываются в исходном состоянии, показанном на фиг. 1. При перемеш,ении груза слева направо в исходном положении (фиг. 5) легкосъемные ограничители 10 установлены при помощи винта 16 с правой стороны. Промежуточные звенья 5 через регулируемые упоры 11 опираются на амортизаторы 18 ограничительной наклонной поверхности 13 стационарной опоры 3. Подвижная рама 2 через регулируемый штырь 15 опирается на амортизатор 8 тяги 7 и расположена ниже неподвижной рамы 1. При включении пневмопривода 6 подвижная рама 2 перемещается совершая криволинейное движение в продольной вертикальной плоскости, конвейера. При этом стержни 4 поворачиваются по часовой стрелке относительно осей шарниров В при неподвижных промежуточных звеньях 5. При дальнейшем повороте стержней 4 ограничители 10 касаются промежуточных звеньев 5, образуя жесткое соединение, и в дальнейшем разворачиваются совместно относительно осей шарниров А как единые звенья AD (фиг. 6). Грузы, перемещаемые подвижной рамой 2, описывают в пространстве траектории, близкие к круговым, и перемещаются по конвейеру на один шаг вправо. Дальнейшее движение конвейера осуществляется аналогично при перемещении грузов справа налево, только в обратном направлении. В предлагаемом устройстве упрощена конструкция и исключен дополнительный привод для обеспечения реверсирования шагового конвейера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1977 |
|
SU648477A1 |
| Шаговый конвейер | 1977 |
|
SU745807A1 |
| Шаговый конвейер | 1986 |
|
SU1350083A1 |
| Шаговый конвейер | 1986 |
|
SU1411241A1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Устройство для удаления ила | 1985 |
|
SU1293124A1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Шаговый конвейер | 1978 |
|
SU727529A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
1. ШАГОВЫЙ РЕВЕРСИВНЫЙ КОНВЕЙЕР, содержащий установленную на основании неподвижную раму, подвижную раму с шарнирно закрепленными на ней стержнями, расположенные на основании опоры для стержней и привод возвратно-поступательного перемещения подвижной рамы, отличающийся тем, что, с целью упрощения конструкции конвейера, каждый стержень щарнирно связан с опо ///Y fff рой посредством промежуточного звена с двусторонним упором и имеет ограничитель поворота стержня, установленный с возможностью перестановки его по разные стороны относительно промежуточного звена и взаимодействия с последним, причем каждая опора выполнена с двумя ограничительными Наклонными поверхностями, а каждый двусторонний упор установлен с возможностью взаимодействия с соответствующей ограничительной наклонной поверхностью, при этом стержни связаны между собой посредством тяги, а подвижная рама имеет щтырь, установленный с возможностью взаимодействия с тягой. 2.Конвейер по п. 1, отличающийся тем, что тяга имеет амортизаторь, установленные с возможностью взаимодействия со штырем. (Л 3.Конвейер по п. 1, отличающийся тем, что каждая ограничительная наклонная поверхность имеет амортизатор. 4.Конвейер по п. 1, отличающийся тем, что каждый ограничитель поворота стержня имеет амортизатор. 00 00 HanpaS/ifHue перемещения уза ///////. Фиг1
V////// у/////
//////л .
HanpaSjieHutf перепещенил груза
////7////
фиг у/////
Фиг 7 ///////
А-А повернуто
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаговый конвейер | 1978 |
|
SU727529A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаговый конвейер | 1976 |
|
SU624836A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
