Изобретение относится к устройствам для транспортирования грузов, а именно к шаговым конвейерам, и может быть использовано Б любой отрасли народного хозяйства, где требуется обеспечить перемещение грузов с заданным интервалом и шагом. Цель изобретения - повышение надежности работы конвейера. На фиг. I изображен конвейер в момент; начала рабочего хода; на фиг. 2 - разрез Л--А на фиг. 1. Конвейер состоит из неподвижной рамы 1, подвижной рамы 2, выполненной в виде двух механизмов: четырехзвенного кривошипного механизма и параллелограмма. Кривошипный механиз.м состоит из носителя 3, снабженного стойками 4, 1иарнирпо закрепленными на кривошипах 5, жестко смонтированных на осях 6 и 7 роликов 8. Оси 6 и 7 связаны .1ежду собой тягами 9 с возможностью coBepuiaTb в них врашательиое движение, а ролики 8 установлены, в направляющих 10. Параллелограм.м содержит рычаги 11, плечи которых меньше плечей кривошипов, причем оптимальное соотношение их длин 1:2, так как при таком соотношении плечей дуга траектории движения носителя достаточно приближена к вертикальной прямой, и которые жестко закреплены на осях 6 и 7 под прямым угломугол, при котором приложенное к рычагу усилие будет наименьшим, - относительно кривошипов 5, соединительное звено 12, niapHHpHo связывающее между собой рычаги 11 и тяги 9. На тягах 9 установлен механизм 13 фиксации носителя 3 в нижнем положении в виде амортизаторов-стаканов и механизм фиксации 14 носителя 3 в верхнем положении в виде подпружиненной запирающей собачки 15, взаимодействующей с кулачком 16,жестко установленным на оси 7. На неподвижной раме 1 жестко закреплен упор 17, снабженный установочным винтом 18, а также откидной упор 19, имеющий ролик 20, пружину 21 возврата и выполненный с возможностью перестановки вдоль неподвижной рамы, для чего неподвижная рама снабжена отверстиями, в которые крепится откидной упор 19. Привод конвейера выполнен в виде закрепленного концами к тяге 9 гибкого элемента 2.2, связанного через отклоняющие ролики 23 с лебедкой 24. Шаговый конвейер работает следующим образом. При вращении барабана лебедки 24, например, против часовой стрелки (привод от электродвигателя через редуктор с реверсивным м.еханизмом и тормоз, на чертеже не показаны) гибкий эле.мент 22 одним концом наматывается на барабан „тебедки 24, а другим концом, сматываясь, перемещает подвижную раму 2 на роликах 8 в направляющих 10. При движении рамы 2 влево рычаг 11 приходит в соприкосновение с винтом 8 упора 17 и при д,альнейшем движении рамы 2 рычаг 11, упираясь з винт 18, поворачивает ось 6 и одновременно через соединительное звено 12 поворачивает ось 7 против часовой стрелки, при этом поворачиваются жестко закрепленные на оси кривошипы 5 и обеспечивают посредством стоек 4 подъем носителя 3 в верхнее положение. При этом груз переходит с неподвижной рамы 1 на носитель 3. Поскольку плечо кривошипов 5 больше плеча рычагов 11, а шарниры, соединяющие кринопи-шы 5 со стойками 4 носителя 3, в исходном по.пожении расположе1 ы ниже осей 6 я 7, подъем носителя происходит 10 дуге окружности, близкой к вертикальной прямой. За счет этого не происходит повреждений i-руза или его упаковки. При переходе груза с неподвижной ра мы 1 на носитель 3 запирающая собачка 15 взаимодейств)ет с кулачком 16, поворачиваюпшмся с осью 7, заходит в выемку к лачка 16 и фиксирует носитель.3 с грузом в верхнем положении. От конечного выключателя (не показан) вращение барабана лебедки 24 меняется на противопоотожное. Подвижная рама 2 с грузом перемещается вправо на заданный шаг. Регулирование длины рабочего хода конвейера осуществляется за счет установочного ви}5та 18 упора 17, а также за счет перемещения упора 19 путем его перестановки в отверстия (не показаны), выполненные в неподвижной раме 2. После перемещения подвижной рамы 2 с грузом на заданный шаг запирающая собачка 15 упирается в ролик 20 упора 19 и, поворачиваясь вокруг своей оси, выходит из выемки кулачка 16. Носитель под действием собственного веса и веса, груза опускается, груз укладывается на неподвижную раму 1. При дальнейшем опускании носителя кривощипный механизм и параллелограмм подвижной рамы 2 занимают исходное положение, причем носитель 3 приводится во взаи.модействие с механизмо.м 13 фиксации. При перемещении подвижной рамы 2 вправо на ша1 изменяется вращение лебедки 24 барабана на противоположное. Цикл повторяется. Использование предлагаемого шагового конвейера гюзволяет упростить конструкцию, повысить надежность его работы, обеспечить быструю регулировку рабочего хода. Кроме того, подъем и опускание груза происходит по траектории, близкой к вертикальной прямой, что исключает возможность порчи груза или его упаковки при этих операциях.
1
/1
:ш-/
7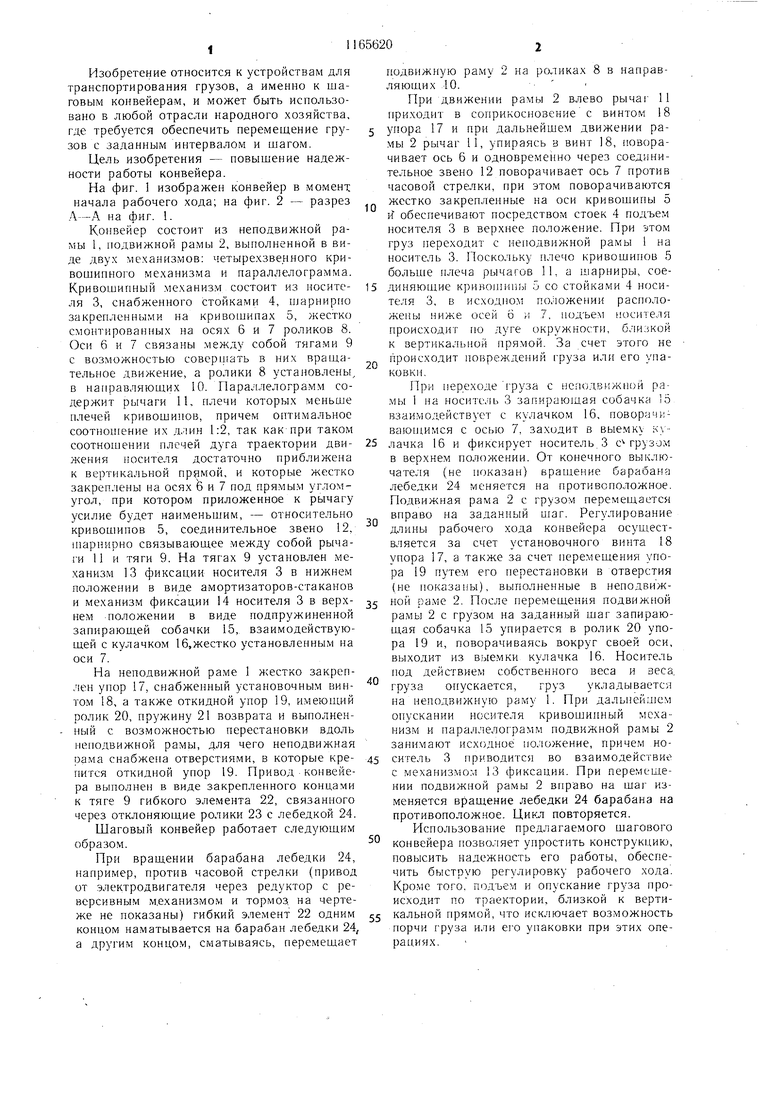
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU908690A1 |
| Шаговый конвейер | 1977 |
|
SU747777A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Тележечный шаговый конвейер | 1973 |
|
SU483318A1 |
| Шаговый конвейер | 1979 |
|
SU878683A2 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Установка для накопления кирпичей с зазором | 1985 |
|
SU1284836A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Шаговый конвейер | 1982 |
|
SU1063735A1 |
| Шаговый конвейер | 1975 |
|
SU666121A1 |
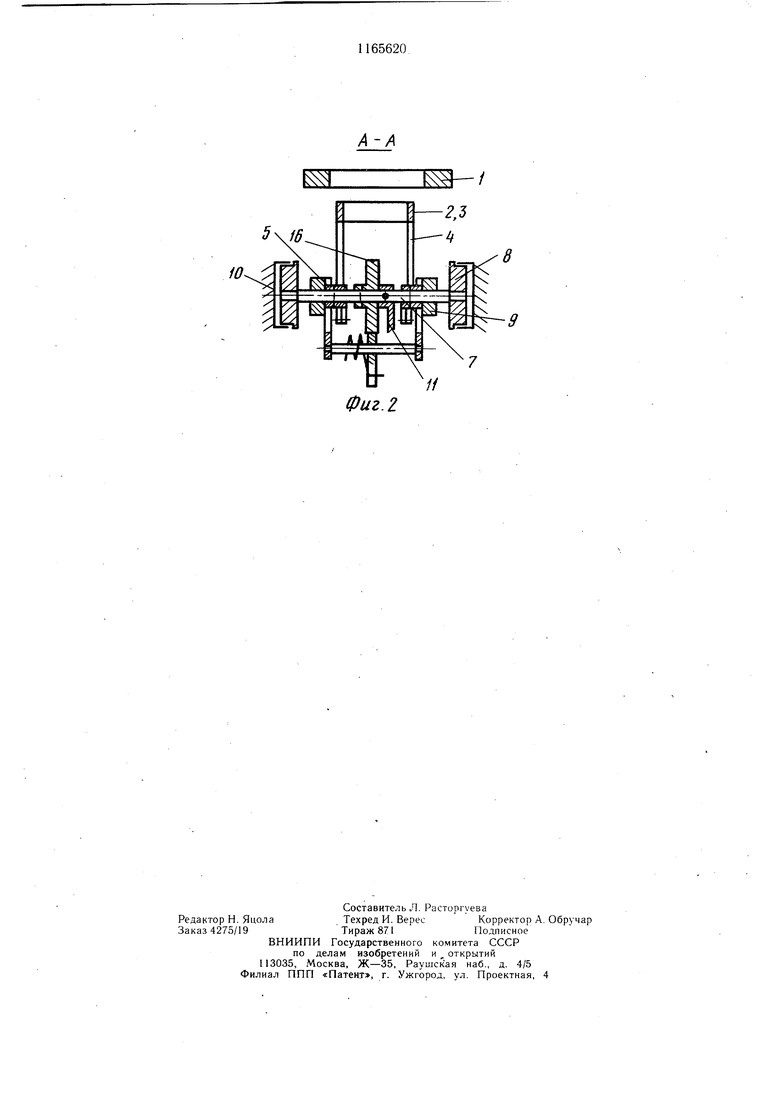
I. ШАГОВЫЙ КОНВЕЙЕР, содержащий неподвижную раму, подвижную раму с носителем, закрепленны.м на кривошипах, установленных на связанных .между собой тягами осях роликов, привод подвижной рамы и механизм фиксации носителя в нижнем положении, отличающийся тем, что, с целью повышения надежности работы конвейера, подвижная рама снабжена жестко смонтированными на осях роликов рычагами, образующими с тягами при помощи соединительного элемента шарнирный параллелограмм, стойками для носителя, щарнирно соединенными с кривошипами, каждый из которых смонтирован на соответствующей оси роликов жестко и под углом к рычагу, и ме.ханизмом фиксации носителя в верхнем положении, а неподвижная рама снабжена двумя упорами, один из которых установлен с возможностью взаимодействия с одним из рычагов, а другой - с механизмом фиксации носителя в верхнем положении. 2.Конвейер по п. 1, отличающийся тем, что кривошип и рычаг с.монтированы один относительно другого под прямым углом. 3.Конвейер по п. 1, отличающийся тем, i что механизм фиксации носитапя в верхнем (Л положении выполнен в виде жестко смонтированного на оси роликов кулачка и подС пружиненной к нему запирающей собачки, уста.новленной с возможностью поворота на подвижной раме.
| ШАГОВЫЙ КОНВЕЙЕР | 0 |
|
SU209291A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шаговый конвейер | 1977 |
|
SU745807A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
