Изобретение относится к промышленному транспорту, а именно шаговым конвейерам.
Целью изобретения является повышение надежности работы и производительности конвейера.
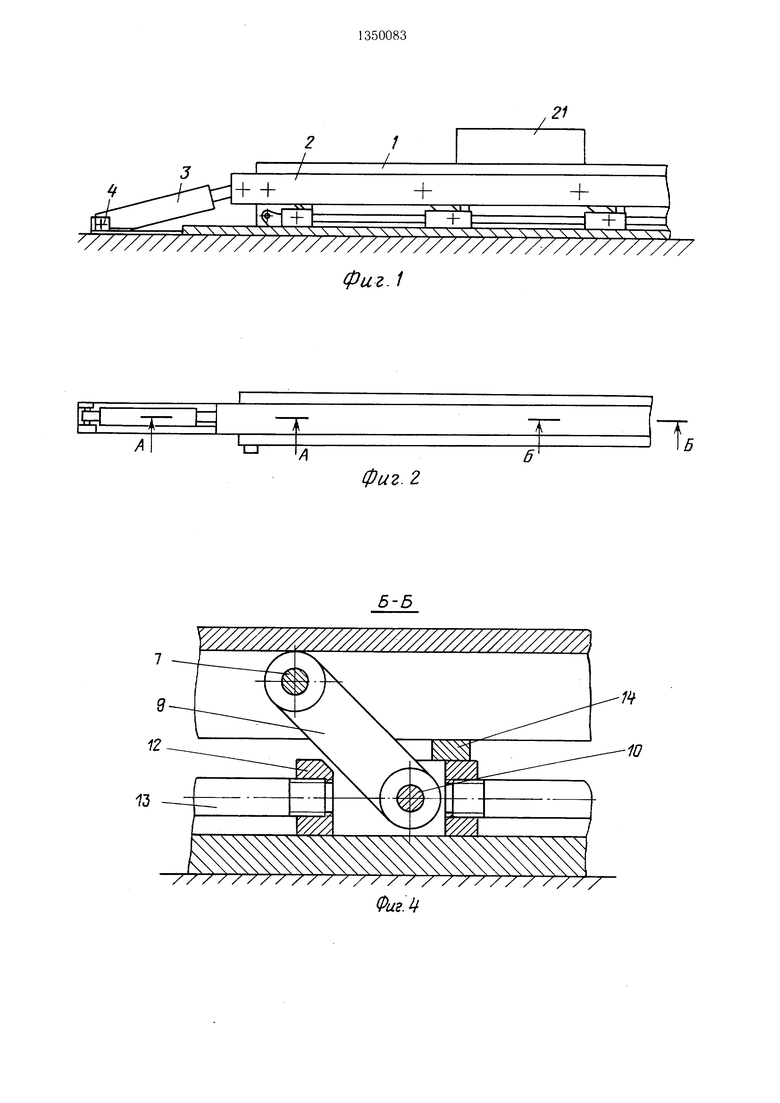
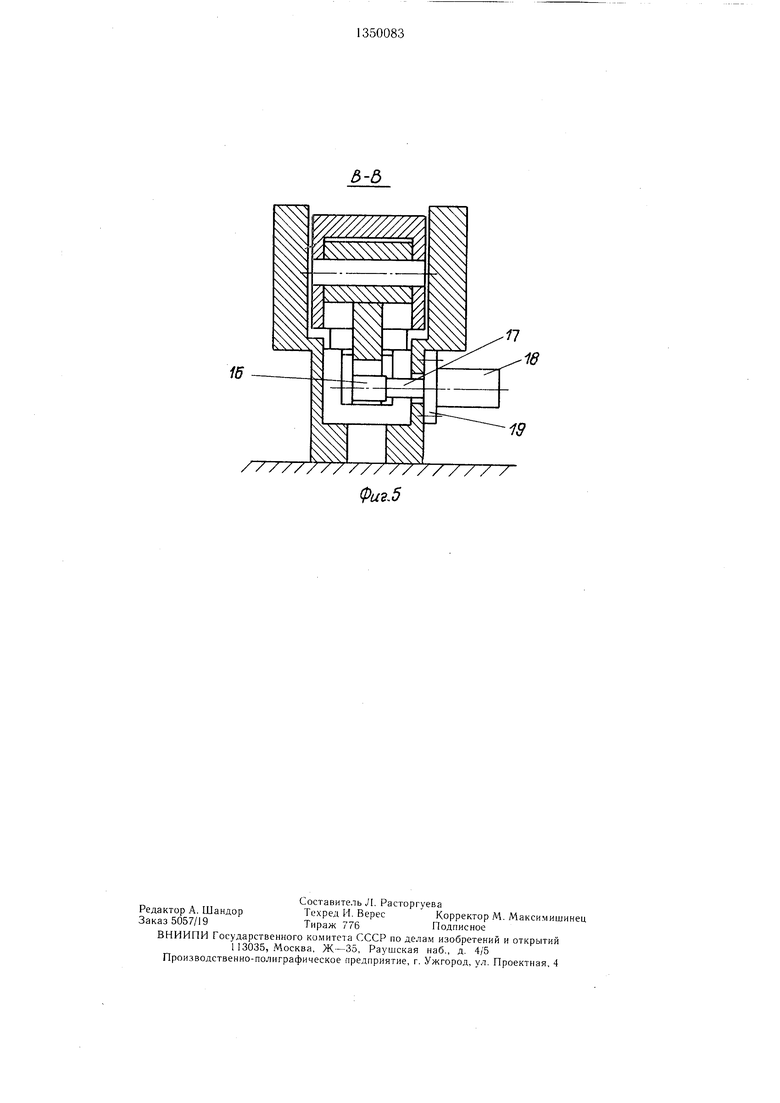
На фиг. I изображен предлагаемый конвейер, продольный разрез; на фиг. 2 - то же, в плане; на фиг. 3 - разрез А-А на фиг. 2; на фиг 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 3.
Шаговый конвейер включает установленную на фундаменте неподв.ижную раму 1, установленную с возможностью возвратно- поступательного перемеп;ения на опорах подвижную раму 2, связанную с приводом в виде силового цилиндра 3, корпус которого шар- нирно соединен осью 4 с неподвижной рамой 1, а шток 5 с помошью оси 6 шарнир- но соединен с подвижной рамой 2.
Подвижная рама 2 шарнирно соединена осями 7 с одними концами звеньев 8 и 9, другие концы которых шарнирно соединены осями 10 с перемещающимися в направляю- :Ш.их неподвижной рамы 1 двумя ползунами 11 и 12. Последние соединены между собой тягой 13 и снабжены ограничительными упорами 14, на которые укладывается в нижнем положении подвижная рама 2. Звенья 8 и 9, ползуны 11 и 12 и ограничительные упоры 14 составляют опоры подвижной рамы 2. Звено 8 имеет радиальную направляющую (например, окружность с центром в точке 15), контактирующую при подвижной рамы 2 с упорным роликом 16, установленным с возможностью возвратно-поступательного переменаения в направлении, перпендикулярном направлению транспортирования, штоком 17 вспо.мо- гательного цилиндра 18, закрепленного в отверстии неподвижной рамы 1 с помощью болтов 19. Звено 8 также имеет упорную площадку 20, расположенную с воз.можностыо взаимодействия с подвижной рамой 2 нри ее рабочем ходе.
Звено 8 при опоре на упорную плоц;ад- ку 20 наклонено к вертикали под углом 4- 5° в направлении, противоположном направлению транспортирования. Этот угол является оптимальным для всех реальных пар ползун - направляющая. Шаговый конвейер перемещает изделие 21.
Шаговый конвейер работает следующим образом.
В исходном положении подвижная рама 2 находится в крайнем левом положении (фиг. 1), при этом шток 5 гидроцилиндра 3 втянут, подвижная рама 2 лежит в нижнем положении на ограничительных упорах 14, упорный ролик 16 находится на радиальной направляющей звена 8.
Изделие 21 укладывается на неподвижную раму 1, включается силовой цилиндр 3, щток 5 начинает выдвигаться. Звенья 8 и 9 начинают поворачиваться вокруг осей-10, ролик 16 катится по радиальной направляющей звена 8 и подвижная рама 2 нодни
мается и принимает на себя изделие 21. Поворот звеньев 8 и 9 нроисходит до тех пор, пока звено 8 упорной площадкой 20 не упрется в подвижную раму 2, одновременно ролик 16 сходит с радиальной направляющей звена 8 и подвижная рама 2 с ползунами 11 и 12 и изделием 21 перемещается в направляющей неподвижной рамы 1 до тех пор, пока не кончится рабочий ход силового цилиндра 3.
Затем силовой цилиндр 3 включается на обратный ход, щток 5 начинает втягиваться, звенья 8 и 9 поворачиваются до тех пор, пока подвижная рама 2 не ляжет на упоры 14, после чего ползуны 11 перемещаются по направляюш.им неподвижной ра- .мы 1 вместе с подвижной рамой 2 в исходное положение.
При опускании подвижной рамы 2 изделие 21 вновь укладывается на неподвижную раму 1, но уже переместившись вдоль нее на
0 один Hjar.
Во время возврата шагового конвейера вспомогательный цилиндр 18 втягивает щток 17 с роликом 16 для обеспечения прохода звена В. После возвращения щагового конг вейера в исходное ноложение шток 17 с роликом 16 выдвигается и ролик 16 может контактировать с криволинейной направляющей звена 8.
Перемещение изделия 21 на последующие iJjarH осуществляется аналогично перQ вому шагу.
Формула изобретения
Шаговый конвейер, содержащий неподвижную раму, установленную с возможс ностью возвратно-поступательного перемещения на опорах по направляющей подвижную раму и привод подвижной рамы в виде силового цилиндра, отличающийся тем, что, с целью повышения надежности работы и производительности конвейера, он снабжен
0 упорным роликом, установленным с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном направлению транспортирования, а опоры подвижной рамы выполнены в виде двух расположенных в направляющей и связанных
между собой тягой ползунов с ограничительными упорами и двух звеньев, один конец каждого из которых шарнирно соединен с подвижной рамой, а другой конец - с соответствующим ползуном, при этом одно из звеньев имеет упорную площадку и радиальную направляющую, расположенную с воз- .можностью взаимодейст)ия с упорны.м роликом при подъеме подвижной рамы, причем упорная площадка расположена с возможностью взаимодействия с подвижной рамой
г при ее рабочем ходе, а звено с упорной площадкой при этом наклонено к вертикали под углом 4-5° в направлении, противоположном направлению транспортирования.
0
фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер-накопитель | 1986 |
|
SU1320133A1 |
| Шаговый конвейер | 1982 |
|
SU1027111A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Шаговый конвейер для перемещения труб | 1991 |
|
SU1838218A3 |
| Способ транспортирования изделий и шаговый конвейер для его осуществления | 1986 |
|
SU1406088A1 |
| Шаговый реверсивный конвейер | 1982 |
|
SU1070088A1 |
| Шаговый конвейер | 1979 |
|
SU804550A1 |
| Шаговый конвейер автоматической линии | 1982 |
|
SU1070087A1 |
Изобретение относится к промышленному транспорту. Цель - повышение надежности работы и производительности шагового конвейера. Конвейер включает установленную на фундаменте неподвижную раму (HP) и установленную на опорах по направляюшей с возможностью возвратно- поступательного перемещения подвижную раму 2, связанную с приводом в виде силового цилиндра (СЦ). Корпус СЦ шарнирно соединен осью с HP, а шток 5 осью 6 шарнирно соединен с рамой 2. Опоры рамы 2 выполнены в виде двух расположенных в направляющей и связанных между собой тягой ползунов с ограничительными упорами 14 и звеньев. Один конец каждого звена шарнирно соединен с рамой 2, а другой - с соответствующими ползунами. Звено 8 имеет упорную площадку 20 и радиальную направляющую, контактирующую при подъеме рамы 2 с упорным роликом (УР), установленным с возможностью возвратно-поступательного перемещения в направлении, перпендикулярном направлению транспортирования. Площадка 20 взаимодействует с. рамой 2 при ее рабочем ходе. Звено 8 с площадкой 20 наклонено к вертикали под углом 4-5° в направлении, противоположном направлению транспортирования, изделие укладывается на HP, включается СЦ и звенья опоры поворачиваются. При этом УР катится по радиальной направляющей звена 8. Рама 2 поднимается и принимает на себя изделие 21. При повороте звеньев звено 8 с площадкой 20 упирается в раму 2 и УР сходит с радиальной направляющей звена 8. Рама 2 с ползунами 11 перемещается по направляющей HP, пока не кончится рабочий ход СЦ. Возвращение рамы 2 в исходное положение происходит в рабочем порядке. 5 ил. А-А Ю (Л со О1 о о оо со Риг.} /5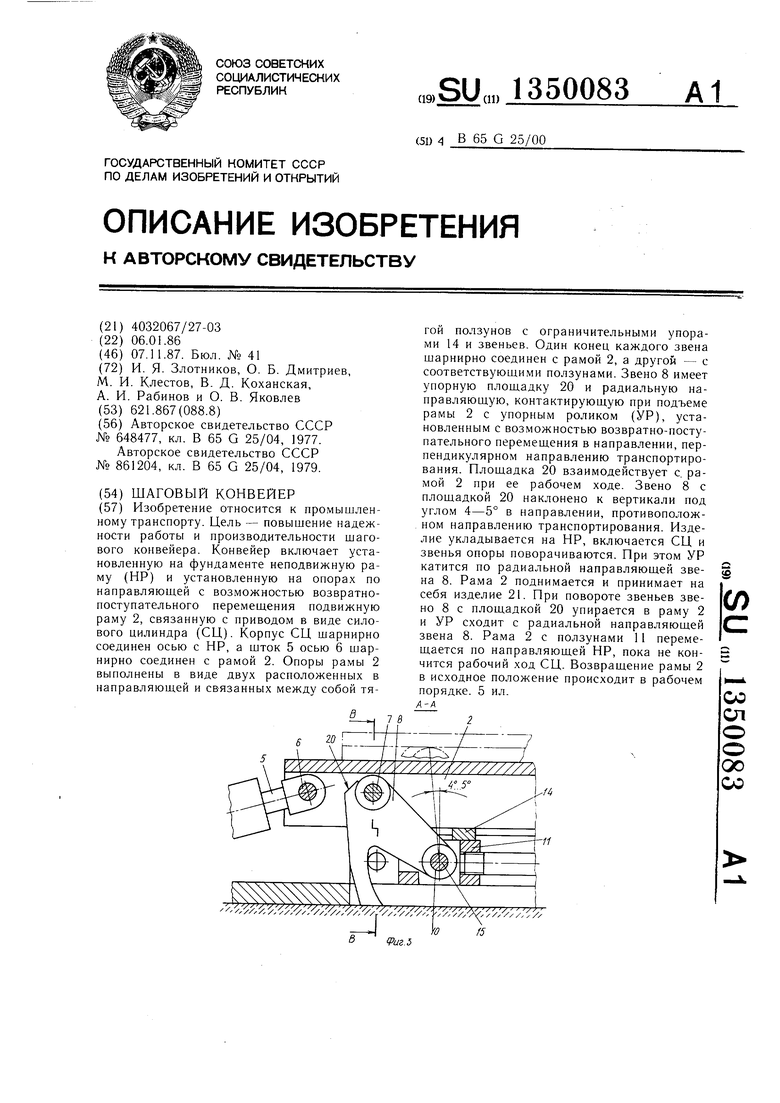
Н
ч
Т.
фиг. 2
%% %%%%%%%:%%
-/
//////// /// /////////// ////
Фиг.
////////////////// / Фи2,5
| Шаговый конвейер | 1977 |
|
SU648477A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шаговый конвейер | 1979 |
|
SU861204A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
