(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1977 |
|
SU745807A1 |
| Шаговый конвейер | 1979 |
|
SU878683A2 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Шаговый конвейер | 1980 |
|
SU882863A1 |
| Шаговый конвейер | 1977 |
|
SU663636A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНДИТЕРСКИХ ПЛАСТОВ | 1994 |
|
RU2101957C1 |
| Шаговый конвейер | 1980 |
|
SU908690A1 |
Изобретение относится к машинам непрерывного транспорта и может быть использовано в любой области народного хозяйства, где требуется обеспечить перемещение грузов с заданным интервалом времени и шагом.. Известен шаговый конвейер, у которого перемещение на шаг осуществляется от привода в виде бесконечной цепи с толкателем. Конвейер вкгазчает неподвижную раму, привод в виде бесконечной цепи с толкателем, подвижную раму в виде носителя, установленного на кривошипах, опирающихся на связанные между собой тягами оси роликов, установленных в направляющих, копириую направляющую для носителЯ|Вьтол- ненную с возможностью изменения ее длины, при этом тяги имеют упор, установленный с возможностью взаимодействия с толкателем цепи, а носитель снабжен механизмом фиксации возврата в исходное положение. Копир- ная направляющая для носителя в начале и на конце имеет шарнирно закрепленный участки с кронщтейном, причем участок в начале направляющей установлен под углом к ней с упором на кронштейн, а участок на конце направляющей установлен с возможностью взаимодействия с кронштейном и связан с контргрузом. Механизм возврата носителя в исходное положение выполнен в виде противовеса и гибкого элемента, один конец которого соединен с носителем, а другой - с противовесом. Механизм фиксации носителя вьшолнен в виде амортизаторов, установленных на тягах с возможностью взаимодействия с кривошипами D1Недостатк-ям янного конвейера являются сложность конструкции, не- , достаточная надежность в работе, отсутствие регулировки хода носителя, увеличение габаритных размеров. Сложность конструкции, недостаточная надежность в работе, увеличение габаритных, размеров вызваны выпо.пнением
механизма возврата носителя в исходное положение за счет противовеса.
Наиболее близким к предложенному является шаговый конвейер, включаюищй неподвижную раму, установленную на роликах в направляющих, подвижную раму с закрепленными на ней основным и дополнительным упорами, и привод в виде бесконечной цепи с толкателем, взаимодействующим с основным упором при рабочем ходе подвижной рамы, а .с дополнительным упором - при холостом ходе подвижной рамы 2.
Недостаток данного конвейера состоит в том, что размещение привода в виде бесконечной цепи с толкателем под направляющими, по которым движется носитель подвижной рамы, а также конструктивное выполнение основно.го дополнительного упоров приводит к ув личению габаритов конвейера. Кроме того, отсутствует регулировка хода носителя, при этом ход может менятьс в процессе работы конвейера и зависи от натяжения цепи (межцентрового расстояния).
Целью изобретения является уменьшение габаритов конвейера.
Указанная цель достигается тем, что направляющие расположены между ветвями цепи привода и снабжены ко. пирами, один из которых закреплен на них с возможностью взаимодействия с основным упором в конце рабочего хода подвижной рамы, а другой - с дополнительным упором в конце ее холостого хода, при этом основной и дополнительн1 1й упоры выполнены подпружиненными.
г.
При,ЭТОМ, с целью обеспечения
регулировки хода подвижной рамы, копиры установлены с возможностью их перемещения относительно продольной оси конвейера и последующей фикcaциe
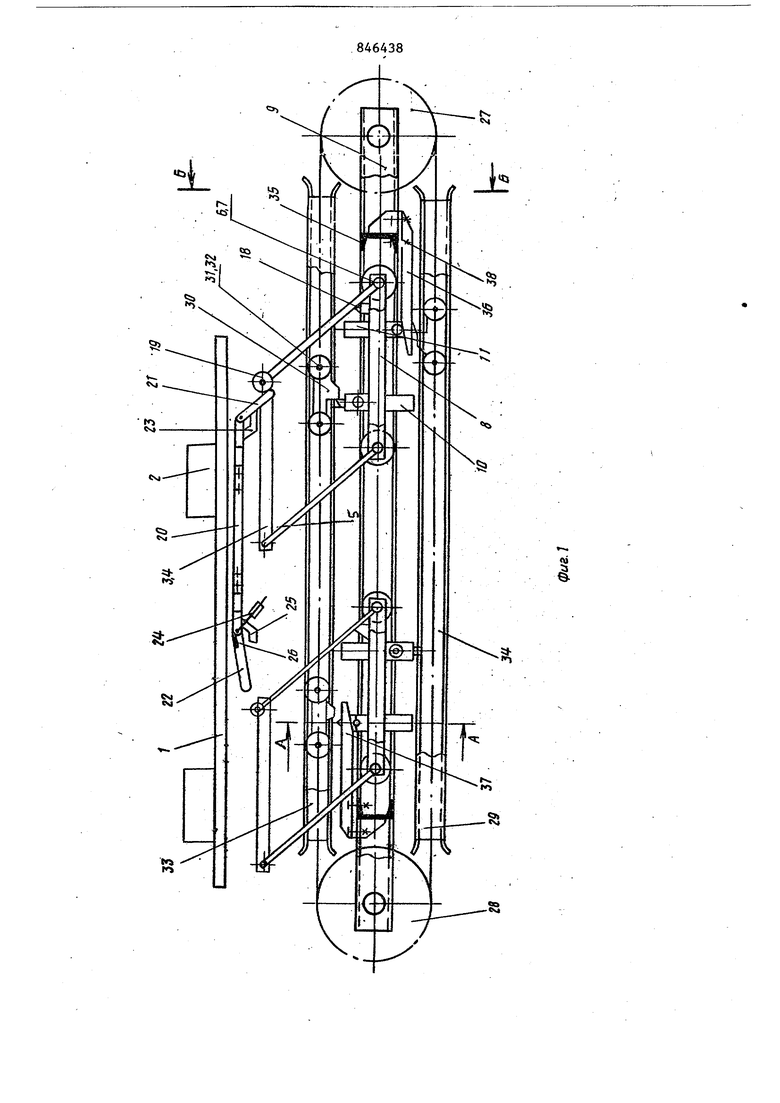
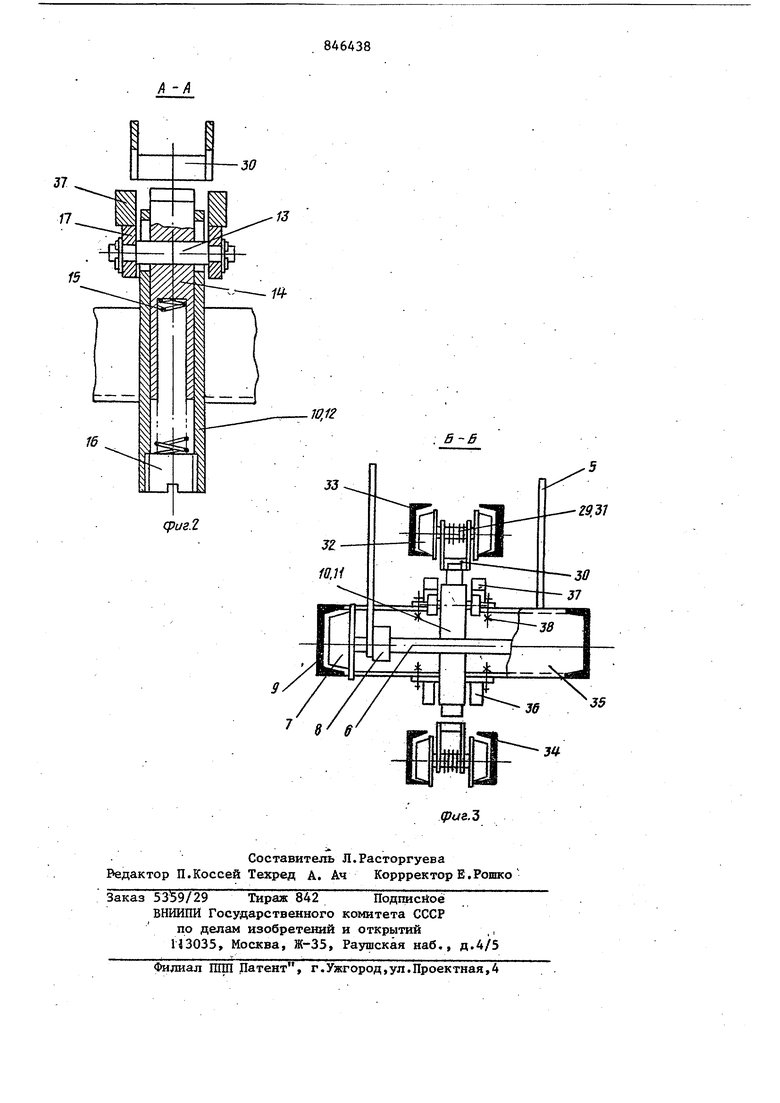
На фиг. 1 изображен конвейер, общий вид (тонкими линиями показаны носитель и толкатель в момент окончания рабочего хода), на фиг. 2 - рарез А-А (по упору ) на фиг.1 на фиг. 3 - разрез В-Б на фиг.1.
Конвейер состоит из неподвижной рамы 1, на которой лежит груз 2, и Подвижной рамы 3 iB виде параллелограмма, состоящего из носителя 4, шарнирно установленного на кривопшпах 5, опирающихся на оси 6 роликов
8,а ролики 7 установлены в направляющих 9 в виде, например, двух парал лельно установленных швеллеров. На. 8 закреплены основной упор Го рабочего хода и дополнительный упор 11 холостого хода. Упоры имеют одинаковую конструкцию, но развернуты в противоположную сторону. Каждый из упоров имеет корпус 12 с осевьм цилиндрическим отверстием и сквозным пазом. В отверстие корпуса 12 с возможностью возвратно-поступательного перемещения относительно паза устанавливается на оси фиксатор 14, который поджимается к краю паза пружиной 15 сжатия, при этом второй конец пружины 15 поджимается винтом 16, С двух сторон на оси 13 шарнирно установлены ролики 17. На тягах 8 также закреплен мехаршзм 18 фиксации носителя, выполненный в виде кронштейнов с амортизаторами, установленными с возможностью взаимодействия с кривошипами 5. На одной из осей, соединяющих носитель 4 с кривошипами 5, установлены ролики 19 для взаимодействия с копириыми направляющими 20, выполненными с возможностью изменения длины за счет раздвижных стыков. Направляющая 20 имеет два крайних участка 21 и 22.
Участок 21 установлен шарнирно под углом к направляющей 20, на которой закреплен кронштейн 23 для взаимодействия с -участком 21. Участок 22 связан с контргрузом 24 и установлен maproipHO к направляющей 20, на которой закреплен кронштейн 25 для взаимодействия с участком 22, а также имеется выступ 26, удерживающий участок 22 под более острым углом к горизонтали, чем участок 21. Привод конвейера выполнен в виде закрепленной на звездочках 27 и 28 бесконечной цепи 29 с толкателем 30. Последний крепится к звеньям цепи 29 за счет замены двух пальцев цепи на оси 31, на которые устанавливаются ролики 32, Последние смонтированы с возможностью перемещения по направляющим 33 и 34, которые расположены с двух сторон относительно направляющей 9 для роликов 7 носителя 4. Направляющие 33 и 34 вьтолнены в виде, например, двух параллельно установленных швеллеров. Между направляющими 9 закреплены связи 35, на которых крепятся копиры 36 « 37 для взаимодействия с подпружиненными упорами 10 и 11. Каждый из копиров 36 и 37 крепится к связи 35 через основ-ание, в котором выполнены пазы что обеспечивает возможность перемещения копиров относительно продольной оси конвейера с последующей фиксацией болтовым соединением 38. Шаговый конвейер работает следующим образом. При вращении бесконечной цепи 29 (привод от электродвигателя через ре дуктор и тормоз не показан) толкатель 30 входит в соприкосновение с фиксатором 14 .упора 10 и начинает движение влево рабочий ход) подвиж ной рамы 3 на роликах 7 по направляющим 9, при этом ролики 17 упора ,11 освобождаются от Копира Збг, а пру жина 15 возвращает фиксатор 14 в нижнее положение, подготавливая упор 1I к холостому ходу. В период движения рамы 3 влево ролики 32 толкателя 30 движутся по направляющим 33, что предохраняет цепь 29 от изгибания. П движении рамы 3 влево POHIJKH 19 приходят в соприкосновение с участком 2 направляющей 20, и, двигаясь по указанному участку, обеспечивают подъем носителя 4 над неподвижной рамой I, при этом груз 2 переходит с неподвиж ной рамы 1 на носитель 4. Подъем носителя 4 длится до тех пор, пока ролики 19 не перейдут на горизонтальны участок направляющей 20. При движении роликов 19 по горизоктальному участку направляющей 20 происходит перенос груза 2 на задан ный шаг. Заданный шаг перемещения груза, а также его начало и окончание регулируются с высокой точностью за счет изменения длины направляющей 20 при помощи раздвижных стыков. Пос ле движения по горизонтальному участ ку направляющей 20 ролики 19 переходят на участок 22, при этом начикается поворот указанного участка до тех пор, пока он не соприкоснется с кронштейном 25, при этом преодо левается действие контргруза 24. При движений роликов 19 по участку 22 происходит опускание носителя 4 до тех пор, пока кривошипы 5 не лягут на амортизаторы механизма 18 фиксации, при этом груз 2 переходит с носителя 4 на неподвижную раму 1. При дальнейшем движении ролики 19 перестают взаимодействовать с участком 22, который под действием 86 контргруза 24 поднимается до тех пор, пока не зафиксируется выступом 26. Одновременно происходит взаимодействие роликов 17 упора 10 с наклонным участком копира 37, в результате чего преодолевается действие пружины 15, и фиксатор 14 опускается, при этом он выходит из зацепления с толкателем 30 - собственно прекращается движение носителя 4. За счет перемещения относительно пазоз основания копира 37 обеспечивается регулировка хода носителя 4 при рабочем ходе, после регулировки положение фиксируется болтовым соединением 38. При холостом ходе обеспечивается возврат рамы 3 в исходное положение. В период холостого хода ролики 32 толкателя 30 движутся вправо по направляющей 34, что предохраняет цепь 29 от изгибания. При движении толкатель 30 входит в соприкосновение с фиксатором 14 упора 11 и начинает движение влево подвижной рамы i3 на роликах 7 по направляющим 9, при этом ролики 17 упора 10 освобождаются от копира 37, а пружина 15 возвращает фиксатор 14 в верхнее положение , подготавливая упор 10 к рабочему ходу. Подъем участка 22 под действием контргруза 24 обеспечивает свободный проход роликов 19 мимо него. В конце хода вправо ролики 19 поднимают участок 21 и проходят дальше, после чего участок 21 снова опускается на кронштейн 23. Ролики 17 упора 11 взаимодействуют с наклонным участком копира 36, в результате чего преодолевается действие пружины 15, и фиксатор 14 поднимается, при этом он выходит из зацепления с толкателем 30 - соответственно прекращается движение носителя 4. За снет перемещения относительно азов основания копира 36 обеспечиается регулировка хода носителя 4 ри холостом ходе, после регулировки оложение фиксируется болтовым соеинением 38. При подходе толкателя 0 к фиксатору 14 упора 10 начинаетя движение влево рамы 3, и цикл поворяется. Данный конвейер имеет небольшие абариты как по высоте, так и по лине, при этом обеспечивается регуировка хода носителя. Формула изобретения 1.Шаговый конвейер, включающий неподвижную раму, установленную на роликах в направляющих, подвижную ра му с закрепленными на ней основным и дополнительным упорами, и привод в виде бесконечной цепи с толкателем взаимодействующим с основным упором при рабочем ходе подвижной рамы, а с дополнительным упором - при холостом ходе подвижной рамы, о т л ичающийся тем, что, с целью уменьшения габаритов конвейера, направляющие расположены «жду ветвями цепи привода и снабжены копирами, один из которых закреплен на них с возможностью взаимодействия с основным упором в конце рабочего хода подвижной рамы, а другой - с дополйи 88 тельным упором в конце ее холостого хода, при этом основной и дополнительный упоры выполнены подпружиненными. 2. Конвейер по п.1, о т л и ч а ющ и и с я тем, что, с целью обеспечения регулировки хода подвижной рамы копиры установлены с возможностью их перемещения относительно продольной оси конвейера и последующей фиксацией. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке № 2540532/03, кл. В 65 G 25/04, 197.7. 2.Авторское свидетельство СССР по заявке № 2705581/03, кл. В 65 G 25/04, 1979 (прототип). . бВ
