1
Изобретение относится к машинам непрерывного транспорта и может быть иопользовано в любой области иародного хозяйства, где требуется обеспечить перемещение грузов с заданным интервалом времени и шагом.
Известен шаговый конвейер, у перемещение на шаг осуществляется силовь1М цилиндром D-J.
Недостатком этого конвейера является ог раниченный по длине шаг, который зависит от хора, силового цилиндра.
Наиболее близким техническим решен ем из известньгк является шагооуй шнвей ер, включающий неподвижную раму, поо- вижную раму в виде носителя, установле ного на кривошипах, опирающиеся на связанные между собой тягами оси роликов, и привод в виде бесконечной цепи с толкателем Д7.20
Недостаток конвейера заключае-гся в том, что привод конвейера осуществляется от бесконечнойцепи через двуплечий рьгчаг. При такой конструкции на цепь всегда Действуют усилия под утлом к направлению движения цепи, которые ограничены и вызывают выход передачи из строя. Усилия под углом вызывают прогиб цепи, который наиболее значителен в центре ведомой ветви, что приводит к опусканию носителя с грузом.
Дополнительный прогиб приводит к сс скакиванию цепи со звездочки или к перескакиванию звеньев цепи через зубья звездочки.. Все это ведет к снижению надежности конвейера в работе.
Кроме того, конструкция конвейера не обеспечивает регулирование его рабочего хода.
Цель изобретения - повышение надежности ксшвейёра в работе и возможность регулирования рабочего хода конвейера.
Цель достигается тем, что конвейер снабжен копирной направляющей для носителя, выполненной с возможностью изменения ее длины, а тяги имеют упор, установленный с возможностью взаимодействия -,37 с толкателем цепи, при этом носитель сна жен механизмом фиксации и механизмом возврата его в исхойгое положение. Копирная направляющая в начале и на конце может иметь шаршфно затфепленные участки с крошитейнами и контргрузом, причем участок в начале паправ;гяющей мо жет быть установлен под углом к пей с упором на тфонштейны, а уч.асток па коще направляющей установлен с возможностью взаимодействия с кронштейном и связан с контргрузом. Механизм возврата носителя в исходно положение может быть выполнен в виде противовеса и гибкого элемента, один конец которого соешшен с носителем а дру гой - с противовесом. Механизм фиксации носителя может быть выполнен в виде амортизаторов, уотановленных иа тягах с возмо кностью взаимодействия с кривош1-шами. На чертеже изображен предлагаемый конвейер, момент начала рабочего хода. Конвейер состоит из неподвижной рамы 1, подвижной рамы 2 в видепараллелограмма, состоящего из носителя 3, шар нирно установле1люго на кривощипах 4, опирающихся на оси 5, и роликов 6„ Оси 5 связаны между собой тягами 7 а ролики 6 установлены в направляюща 8 На тягах 7 установлены упор 9 и механизм фиксации 10 носителя, выполненный в виде кронштейнов с амортизаторам установлеш1ыми с возмо кностью взаимодействия с кривошипами 4. На одной из осей, соединяющей носитель 3 с кривошипами 4, установлены ролики 11 для взаи модействия с копирными напрашшющими 1 Каждая копирная направляющая 12 вы полнена составной из трех горизонтально установленных участков , которые связаны между собой с помощью раздвиж ных стыков 16 и 17, а также имеется ;ша крайних участка 18 и 19. Участок 18 установлен щарппрпо под углом к участку 13, причем па участке 13 закреплен кронштейн 20 для взаимо действия с участком 18. Участок 19 связан с контргрузом 21 и установлен шарнирно с участком 15, при на участке 15 зайреплен кронш тейн 22 для взаимодействия с участком 19, а также имеется выступ 23, удержи вающий участок 19 под более острым углом, к горизонтали, чем учаЬток 18. Привод конвейера вьтолнен в виде за крепленной на звездочках 24 и 25 беско ной цепи 26 с толкате;шми 27. 7 Толкатель 27 имеет ролик 28 и крепится к звептлм цепи 26 за счет замены двух пальцев цепи на оси 29, на которые устанавливаются ролики 30. Ролики 30 смонт1фОБаны с возможноетыо перемещения по направляющим 31. Механизм возврата подвижной рамы в исходное положение вьтолнен в виде гибкого элемента 32, один конец которого закреплен на оси 5 подвижной рамы 2, а другой связан через отклоняющие ролики 33 с противовесом 34, Шаговый конвейер работает следующим образом,. При вращении бесконечной цепи 26 (npibBo)i от электродвигателя через редуктор и тормоз условно не показан) ролик 28 то/ кателя 27 входит в соприкосновение с упором 9 и начинает влево подвижной рамы 2 на роликах 6 по направляющим 8, при этом через гибкий элемент 32 преодолевается действие прбтивовеса 34. В период движения .рамы 2 влево ролики 30 толкателя 27 движутся по направляющим 31, что предохраняет цепь 26 от изгибантет. , При движении рамы 2 влево ролики 11 приходят в соприкосновение с участком 18 копирной направляющей 12 и, двигаясь по указанному участку, обеспечивают подъем носителя 3 над неподвижной рамой 1,при этом груз переходит с неподвижной рамы 1 на носитель 3. Подъем .носителя 3 длится до тех пор, пока ролики 11 не переходят на горизонтальный 5часток копирной направляющей 12. При движении роликов 11 по горизонтальному участкз копирной направляющей 1 2 происходит перенос груза на заданный шаг. Заданный шаг перемещения груза, а таюке его начало и окончание легко регул}фуются с высокой точностью за счет перемещения горизонтальных участков 1315 сооТветстветшо по раздвижным стыкам 16 и 17, Предусмотрена и грубая регулировка шага конвейера. Для этого участок 14 и направляющая 31 вьтолнены составными Изкусков мерной длины, например по 0,5 м, а на металлоконструкции поддерживающей опоры звездочек 24 и 25 предусмотрены отверстия с шагом 0,5 м для перестановки указанных опор. .; При грубой регулировке, например, в случае перехода на новый вид продукции, , когда требуется изменитьрабочийход, предполо JKHK-i, с четьфех до трех метров, учас
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1979 |
|
SU878683A2 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Установка для кирпича-сырца на полочные вагонетки | 1978 |
|
SU772869A1 |
| Шаговый конвейер | 1983 |
|
SU1165620A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Транспортно-складская система | 1986 |
|
SU1370032A1 |
| Шаговый конвейер | 1977 |
|
SU663636A1 |
| Шаговый конвейер | 1978 |
|
SU724402A1 |
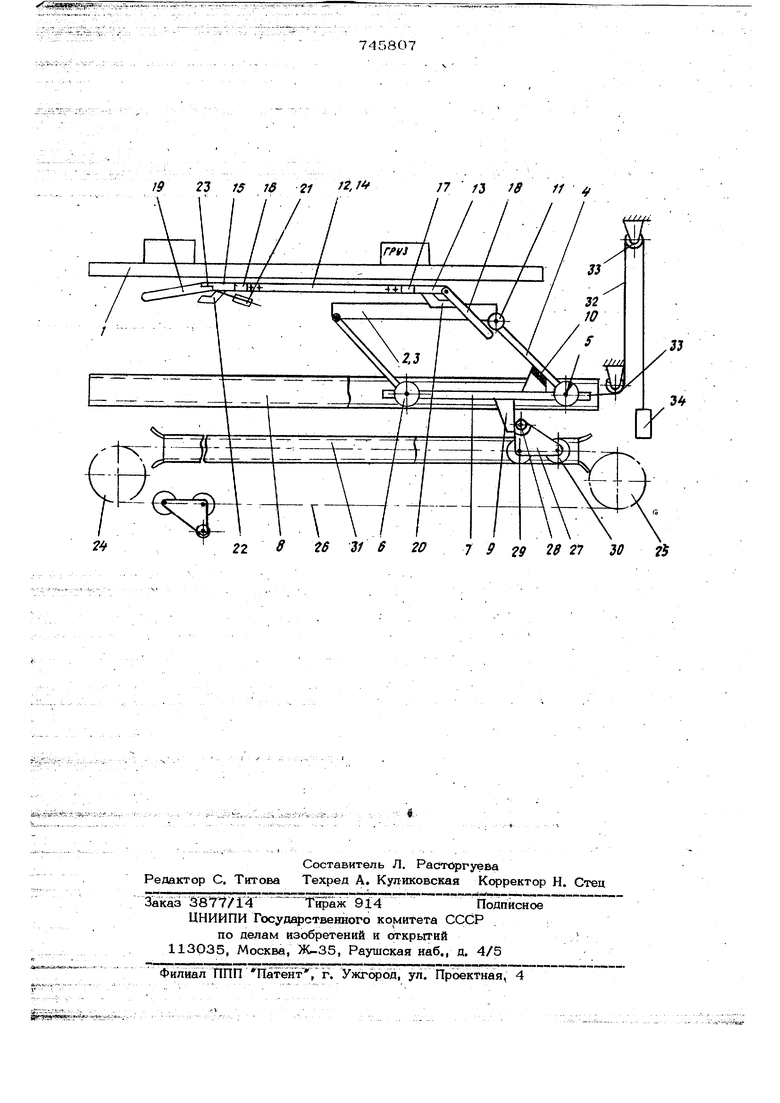
йаЁЙ&ЙЕи: :ток 14 и направляющая 31 за счет иьк частей уменьшается на 1 м, а такж на 1 м переносятся опоры звездочек 24 или 25, при этом цепь соответственно уменьшается. После движения по горизонтальному yiacTKy ролики 11 переходят на участок 19, при этом начинается поворот этого участка до тех пор, пока он не соприкос нется с кронштейном 22,при этом пре одолеЬается действие контргруза 21, При движении роликов 11 по участку 19 происходит опускание носителя 3 до тех пор, пока кривошипы 4 не лягут на амортизаторы механизма фиксации 10, n этом груз переходит с носителя 3 на не подвижную раму 1. При движении толкателя 27 по звездочке 24 он выходит из соприкосновения с упором 9, и начинается холостой ход подвижной рамы 2 вправо под действием противовеса 34, . Предварительно под действием контргруза 21 участок 19 поднимается, пока не упрется в выступ 23, при этом обесп чивается свободный проход роликов 11 м мо участка 19 при движении подвижной рамы 2 вправо. В конце хода вправо ролики 11 поднимают участок 18 и проходят дальше, после чего участок 18 снова опускается на кронштейн 2О, Предусмотрены амортизатор и тормозное устройство в виде регулируемой подпружиненной лыжи для взаимодействия с роликами 6 подвижной рамы 2, что обеспечивает плавную остановку рамы при ходе ее вправо. При подходе толкателя 27 к упору 9 цикл повторяется. Конструкция данного конвейера обеспе чивает надежную работу и регулирование его рабочего хода. Формула изобретения 1. Шаговый конвейер, включающий неподвижную раму, подвижную раму в виде сост 07.6 носителя, установленного на кривошипах, опирающихся на связанньсе между собой тягами оси роликов, и привод в виде бесконечной цепи с толкателем, о- т л н ч а- ю щ и и с я тем, что, с целью повышения его надежности в работе и обеспечения возможности регулирования рабочего хода конвейера, он снабжен копирной направляющей для носителя, выполненной с возможностью изменения ее длины, а тяги имеют упор, установленный с возможностью взаимодействия с толкателем цепи, при этом носитель снабжен механизмом фиксации и механизмом возврата его в исходное положение, . 2.Шаговый конвейер по п. 1, о т л ичающийся тем, что, копирная направляющая в начале и на конце имеет шарнирно закрепленные участки с кронштейнами и контргрузом, причем участок в начале направляющей установлен под углом к ней с упором на кронштейны, а участокна конце направляющей установлен с возможностью взаимодействия с кронштейном и связан с контргрузом, 3,Конвейер поп, 1,отлнча ющ и и с я тем, что механизм возврата носителя в исходное положение выполнен в виде противовеса и гибкого элемента, один конец которого соединен с. носителем, а другой - с противовесом. 4о Конвейер поп, 1, отлича ю- щ и и с я тем, что фиксации носителя выполнен в виде амортизаторов, установленныхна тягах с возможностью взаимодействия с кривошипами. Источники информации, ринятые во внимание при экспертизе 1,Спиваковский А, О, и др. Транспорирующие машины. Атлас кснструкций, М,,, Машиностроение, 1971, с, бО, 2,Авторское свидетельство СССР 54358О, кл, В 65 G 25/О4, 1975 прототип). 22 8 t6 J/ 6 20 7 9 29
745807 /7 /J / 11 28 2 30 f$
