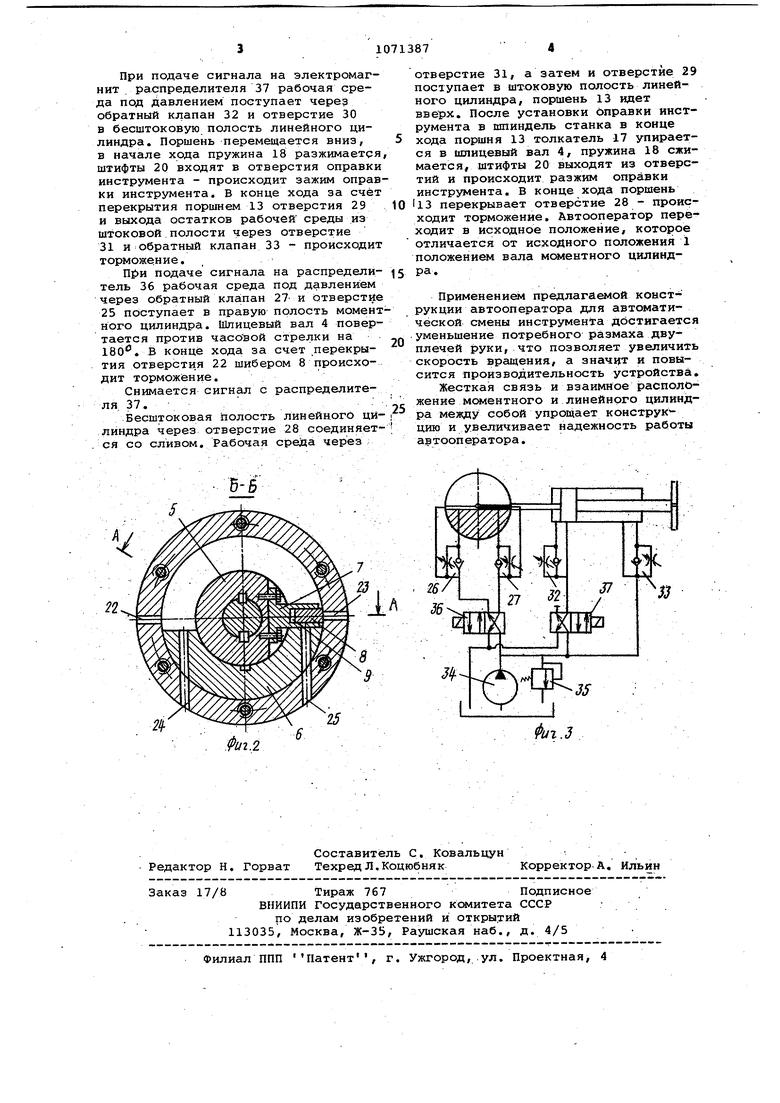
Изобретение относится к станкостро-ению и может быть использовано в устройствах автоматической см ны инструмента. Известен автооператор для автоматической смены инструмента, содержащий двуплечую руку q захватам инструментов, выполненными в виде неподвижных и зажимных планок при водимых в действие от отдельного гидроцилиндра tl3. Недостатками известного автоопе ратора являются сложность конструк ции и наличие отделяемого.привода зажимных планок. Известен также автооператор для автоматической смены инструмента, содержащий моментный и линейный ци линдры, двуплечую руку 23. Недостатками известного решения являются значи -ельная величина раз ха руки и сложность конструкции. Цель изобретения - повышение производительности и надежности ра боты устройства. . Указанная цель достигается тем, 1ЧТО-автооператор для автоматическо смены инструмента, содержащий моментный и линейный цилиндры, двупл чую руку, например в виде неподвиж ной и зажимной планок, снабжен вза имодействующим с валом моментного цилиндра подпружиненным толкателем на котором установлена зажимная., планка, и штифтом, расположенным на фланце моментного цилиндра для фиксации поршня линейного цилиндра в верхнем положении, причем корпус линейного цилиндра жестко связан с корпусом моментного цилиндра, а вал его посредством шлицевого соединения - с поршнем линейного цилиндра, на котором установлена неподвижная планка. На фиг.1 изображен предлагаемый автооператор, общий вид, разрез А-А на фиг.2; на фиг.2 разрез Б-Б на фиг.1; на фиг.З - гидравлическая схема управления автооператором. Автооператор содержит гидравлический привод, состоящий из моментного и линейного цилиндра, захватного устройства. Моментный цилиндр .состоит из корпуса 1, фланцев 2 и 3 шлицевого вала 4, кольца 5, обеспечивакяцего герметизацию междУ полост ми моментного цилиндра и сектора 6, разделяющего полости моментного цилиндра и выполняющего роль упора. На кольце 5 крепится вилка 7 с шибером 8, уплотнение которого и прижим к корпусу 1-обеспечивается резиновым жгутом 9. Для уменьшения трения при вращении в качестве опор шлицевого вала 4 применены шарикоподшипники 10. Линейный гидроцилинд состоит из корпуса цилиндра 11,, жестко связанного винтами 12 с моментным цилиндром, поршня 13, связанного шлицевым соединением с валом 4 моментного цилиндра. Двухзахватная механическая рука состоит из неподвижной планки 14 и зажимной планки 15. Планка 14 жестко связа;наг с поршнем 13 винтами 16, а планка 15 установлена на толкателе 17,.снабженном упругим элементом 18, например пружиной, обеспечивающим зажим оправки инструмента. Для фиксации планки 15 от проворота относительно планки 14 предусмотрены штифты 19. Для надежного захвата оправки инструмента планка 14 снабжена штифтами 20 (по 2 на каждую оправку инструмента) . Для более точной угловой ориентации поршня в момент захвата оправки инструмента на фланце 3 моментного цилиндра установлен штифт 21, а на торце поршня 13 предусмотрены соответствукяцие отверстия. Для торможения вала 4 в конце поворота в корпусе 1 моментного цилиндра выполнены основные отверстия 22 и 23, соединенные с основной магистралью и расположенные .таким образом, что в конце поворота они перекрываются шибером 8, и дополнительные отверстия 24 и 25, соединенные с основной магистралью через дроссели с обратным клапаном 26 и 27. Для -торможения поршня в корпусе линейного цилиндра выполнены основные отверстия 28 и 29, соединенные с основной магист;ралью и которые в конце хода перекрываются поршнем, и дополнительные отверстия 30 и 3.1, соединенные с основной магистралью через дроссели с обратным клапаном 32 и 33. Гидросхема управления автооператором содержит насос 34, предохранительный клапан 35, распределители с электроулравлением 36 и 37, дроссели с обратными клапанами 26, 27, 32 и 33. Автооператор работает следующим образом.. , При включении насоса 34 рабочая реда под давлением поступает через тверстие 22 в левую полость момейтого цилиндра и через отверстие 29 штоковую полость линейного цииндра . Шлицевый вал 4 с КОЛЬЦОМ , вилкой 7,шибером 8 стоит в крайем положении по часовой стрелке. оршень 13 устанавливается в крайнее ерхнее положение и фиксируется тифтом 21. Пружина 18 на-толкателе 7 сжимается,. щтифты 20 планки 14 ыходятиз отверстий оправки инструента - происходит разжим оправки нструмента. В этом положении автоператор подводится к шпинделю стана., При подаче сигнала на электромагнит . распределителя 37 рабочая среда под давлением поступает через обратный клапан 32 и отверстие 30 в бесштоковую полость линейного цилиндра. Поршень перемещается вниз, в начале хода пружина 18 разжимается штифты 20 входят в отверстия оправки инструмента - происходит зажим оправ ки инструмента. В конце хода за счёт перекрытия поршнем 13 отверстия 29 и выхода остатков рабочей среды из штоковой полости через отверстие 31 и обратный клапан 33 - происходит торможение. подаче сигнала на распределитель 36 рабочая среда под давлением через обратный клапан 27- и отверстие 25 поступает в правую полость момент ного цилиндра. Шлицевый вал 4 повертается против часовой стрелки на 180. В конце хода за счет перекрытия отверстия 22 шибером 8 происходит торможение. Снимается сигнал с распределителя, 37. Бесштоковая полость линейного цилиндра через отверстие 28 соединяется со сливом. Рабочая среда через отверстие 31, а затем и отверстие 29 поступает в штоковую полость линей ного цилиндра, поршень 13 идет вверх. После установки оправки инструмента в шпиндель станка в конце хода поршня 13 толкатель 17 упирается в шлицевый вал 4, пружина 18 сжимается, штифты 20 выходят из отверстий и происходит разжим оправки инструмента. В конце хода поршень 13 перекрывает отверстие 28 - происходит торможение. Автооператор переходит в исходное положение, которое отличается от исходного положения 1 положением вала моментного цилиндра. Применением предлагаемой конструкции автооператора для автоматической смены инструмента достигается уменьшение потребного размаха двуплечей руки, что позволяет увеличить скорость вращения, а значит и повысится производительность устройства. Жесткая связь и взаимное расположение моментного и линейного цилиндра между собой упрощает конструкцию и увеличивает надежность работы автооператора.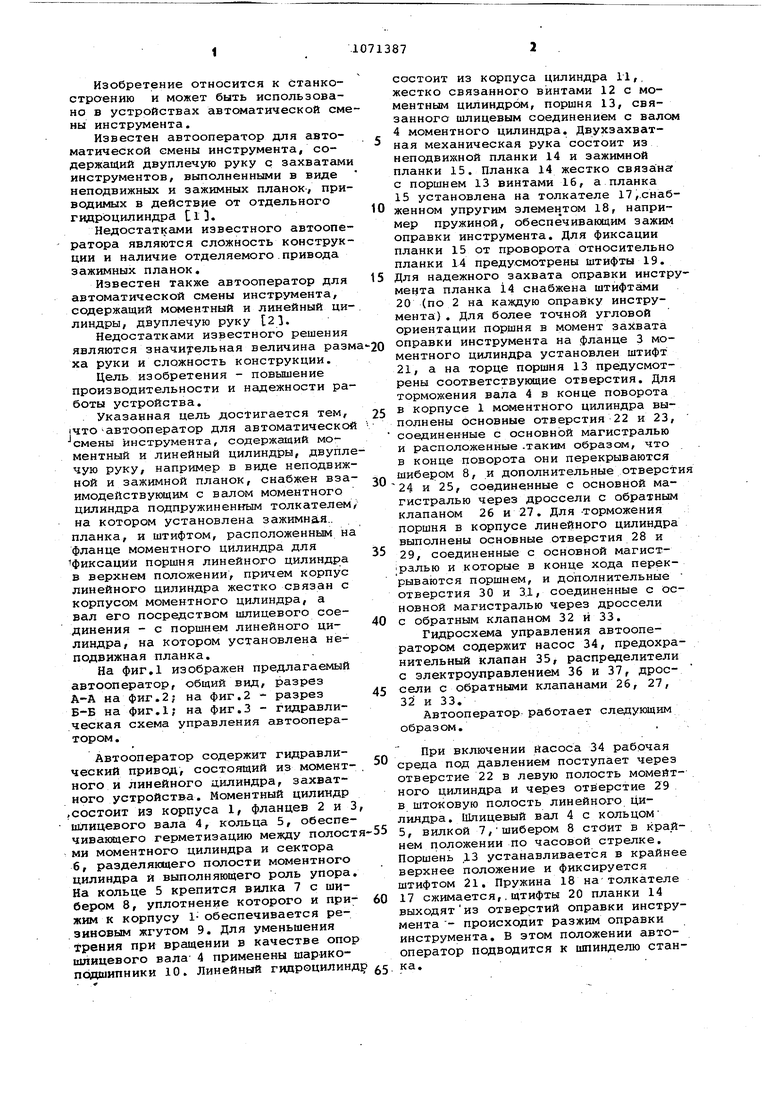
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для автоматической смены инструмента | 1982 |
|
SU1071388A1 |
| Автооператор для автоматической смены инструментов | 1986 |
|
SU1449313A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1450951A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Токарный автомат | 1978 |
|
SU768570A1 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| Устройство автоматической смены инструментов | 1982 |
|
SU1050847A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
АВТООПЕРАТОР ДО1Я АВТШАТ ЧВСКОЙ GMEIUI HHCTPS ffiHTA, содержа мш«еи1ный tt Линейный цилиндры, дв йлечую руку, например, в виде не00 оо подвижной и зажимной планок, о тл и ч а ю щ и и с я тем, что, с целью повышения производительности н надежности работы, он снабжен взаимодёйствукадим с валом моментрного цилиндра подпружиненным толкателем, на котором установлена зажимная планка:, и штифтсмл, расположенньам на фланце моментного цилиндра для фиксации поршня линейного цилиндра в. верхнал положений, причем корпус линейного цилиндра жестко связан с корпусом моментного цилиндра, а вал его посредством введенного шлицевого соединения - с поршнем линейного цилиндра, на котором установлена неподвижная планка.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3266141, КЛ | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
