О
vl
со
00
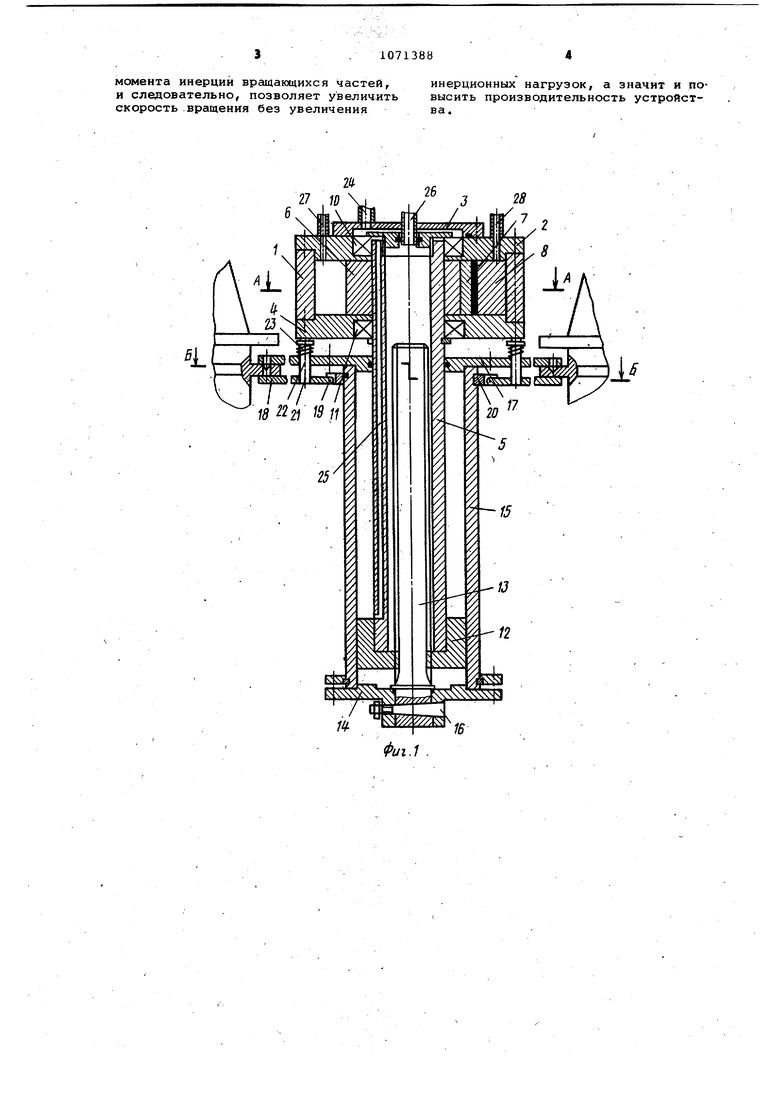
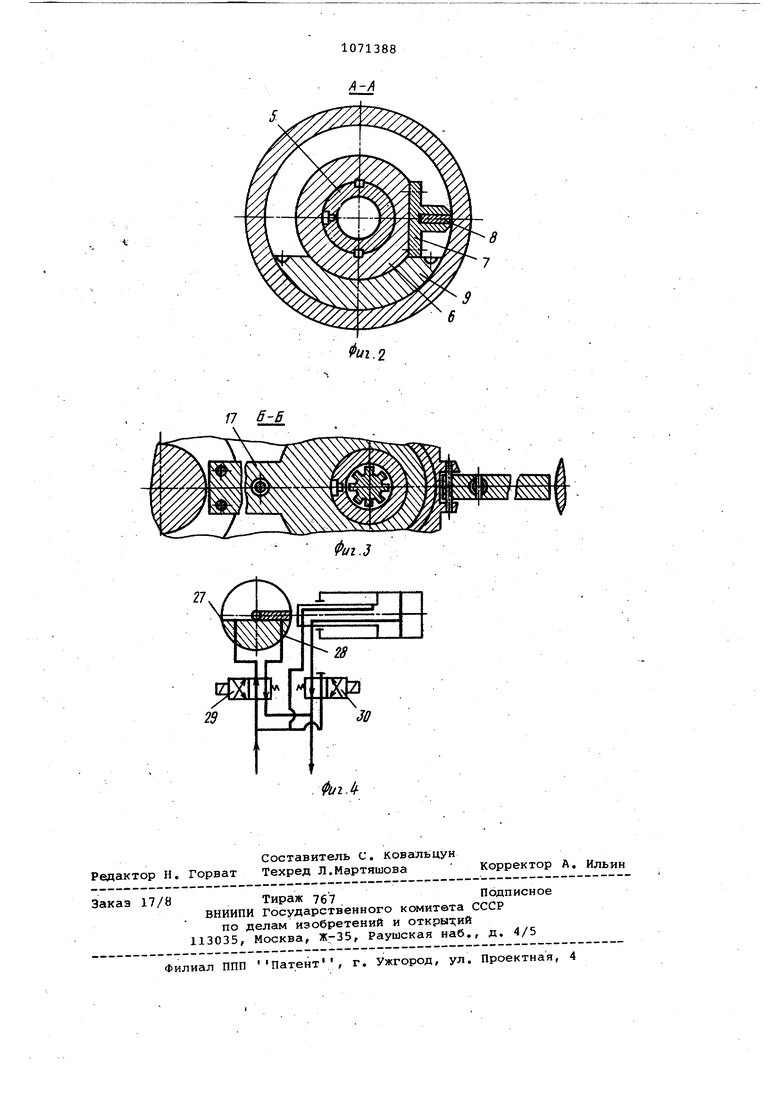
сх Изобретение относится к машиностроению и может быть использовано для автоматической смены инструмен та в металлорежущих станках. Известен автооператор для автом тической смены инструмента, содержащий мсилентный и линейный цилиндры, двуплечую руку с захйатами ин струментов, например, в виде непод в-ижных и зажимных планок til. Недостатками данного автооператора являются значительная величин размаха руки, большие осевые габар ты и сложность конструкции. Цель изобретения - повышение про изводительности и надежности работы устройства. Указанная цель достигается тем, что автооператор, содержащий момент ный и линейный цилиндры, двуплечую руку с захватами инструментов,, например, в виде неподвижных и зажим ных планок, снабжен расположенными с возможностью взаимодействия с корпусом моментного цилиндра и зап жимными планками подпружиненными толкателями и жестко закрепленным на корпусе линейного цилиндра шлице вым валом, двуплечая рука закреплена на верхней части корпуса линейно го цилиндра, шток которого является .валом мсяиентного цилиндра и выполнен полым со шлицевым отверстием, в.котором установлен вышеупомянутый шлицевый вал. На фиг.1 изображен автоЬператор продольный разрез; на фиг,2 - раз рез А-А на фиг,1; на фиг,3 - разре Б-Б на фиг,1; на фиг,4 - гидравлическая схема работы автооператора, Устройство состоит из моментного линейного .цилиндров и двуплечей руки, Моментный цилиндр включает в се бя корпус 1, крышки 2-4; вал 5, несущий кольцо б с вилкой 7 и шибером 8, сектор 9, Для уменьшения трения при вращении в качествеопор на вал 5 насажены подшипники 10 и 1 На вал 5 моментного цилиндра, одновременно являющегося штоком линейного цилиндра, насажен поршень 12, в котором выполнено шлицевое отверс тие, куда входит шлицевый вал 13, ,жестко закрепленный на крышке 14 корпуса 15 линейного цилиндра штифтом 16.Верхняя крышка 17 корпуса лине ного цилиндра одновременно является н подвижными планками руки захвата инст иента. Зажимные планки 18 закреплены на осях 19, сидящих на фланце 20, закрепленном на корпусе линейно 7О цилиндра, В зажимных планках 18 закреплены посредством-осей 21 толкатели 22, взаимодействующие с корпусом моментного цилиндра посредством пружины 23. Рабочая среда в штоковую полость корпуса линейного цилиндра поступает через отверстие 24 в крышке 3 и канал 25, выполненный в стенке вала 5 в бесштоковую полость через отверстие 26 и центральный канал, выполненный путем среза зуба на шлицевом валу 13, Рабочая среда в корпус 1 моментного цилиндра поступает через отверстия 27 и 28, выполненные на крышке 2. Схема управления содержит два распределителя с электроуправлением 29 и 30, Автооператор работает следующим образом, В исходном положении давление подается в штоковую полость корпуса линейного цилиндра через отверстие 24 и канал 25 и в левую полость моментного цилиндра через отверстие 27V Планки двуплечей руки разжаты, корпус линейного цилиндра находится в крайнем верхнем положении. При включении электр.омагнита распределителя 30 рабочая среда через отверстие 26 и центральный канал на шлицевом валу 13 поступает в бесштоковую полость корпуса линейного цилиндра. Усилие, созданное за счет разности площадей штокового и бесштокового торцев поршня 12, перемещает корпус 15 вниз. Неподвижные планки перемещаются вместе с корпусом 15, зажим;ные планки 18 разворачиваются вокруг .осей 19 и зажимают .оправку инструмента. При дальнейшем ходе цилиндра происходит извлечение оправки инструмента. Как только корпус 15 дойдет до упора поршня 12 в крышку 14, включается электромагнит распределителя 29, Рабочая среда поступает в правую полость корпуса моментного цилиндра через отверстие 28, происходит разворот автооператора на 180°. После разворота выключается распределитель 30, бесштоковая полость корпуса 15 соединяется со сливом. Корпус линейного цилиндра перемещается вверх, вставляя оправки инструмента в шпиндель и спутник. Когда толкатели 22 коснутся корпуса 1 моментного цилиндра, планки 18 разойдутся, освобождая инструмент. Применением предлагаемой конструкции автооператора достигается уменьшение потребного размаха двуплечей руки, так как сокращение осевого габарита- неподвижной части автооператора позволяет располагать моментный цилиндр вплотную к гильзе даже при небольших вылетах шпиндельной гильзы. Сокращение размаха двуплечей руки приводит к уменьшении
момента инерции вращающихся частей, и следовательно, позволяет увеличить скорость вращения без увеличения
инерционных нагрузок, а значит и повысить производительность устройства.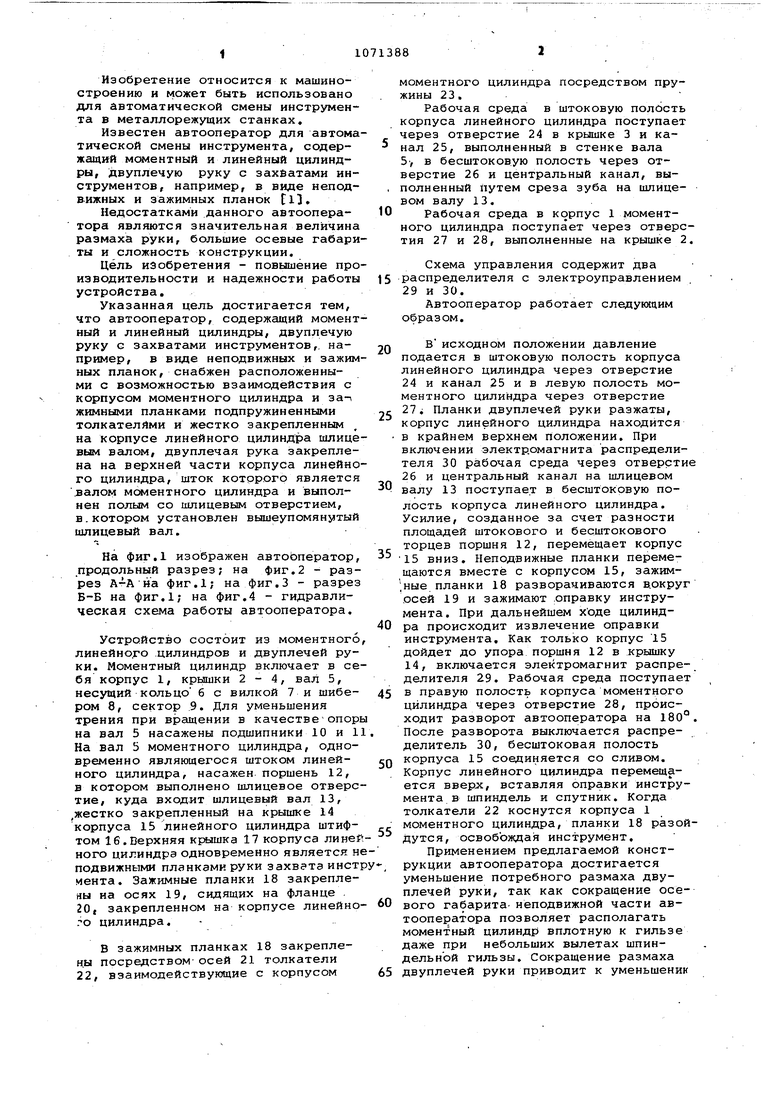
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для автоматической смены инструмента | 1982 |
|
SU1071387A1 |
| Автооператор для автоматической смены инструментов | 1986 |
|
SU1449313A1 |
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
| Устройство автоматической смены инструмента | 1987 |
|
SU1450951A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство автоматической смены инструментов | 1982 |
|
SU1050847A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Гидросистема металлорежущего станка | 1977 |
|
SU659356A1 |
| Автооператор для металлорежущих станков | 1983 |
|
SU1144844A2 |
| ГИДРОСИСТЕМА МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU352741A1 |
АВТООПЕРАтбР ДЛЯ АВТОМАТИЧЕСКОЙ СМЕНЫ ИНСТРУМЕНТА, содержащий моментный и линейный цилиндры, двух плечую руку с захватами инструментов, выполненными в виде неподвижных, и зажимных планок, о т л и ч а ю щи .йс я . тем, что, с целью повышения производительности и надежности работы устройства, он снабжен расположенными с возможностью взаимодействия с корпусом моментного цилиндра и зажимными планками подпружиненными толкателями и жестко закрепленным на корпусе линейного цилиндра шлицевым Всшом, при этом двухплечая рука зак рёплёна на верхней части корпуса линейного цилиндрэ, шток которого является валом моментного цилиндра и выполнен полым со ашицевьол отверстием, в котором установлен вышеупомянутый ошицевый вал. fS
| Манипулятор для автоматической смены инструмента | 1974 |
|
SU516506A1 |
