Изобретение относится к устройствам для загрузки емкостей и может быть использовано в химической, строительной, пищевой и других отраслях народного хозяйства.
Известны устройства для загрузки ом костей, содержащие транспортер для набора ряда изделий, включающий в себя несколько пapaллev ьнo расположенных на (.jcновании цепей и механизм перемещения емкостей.
Недостатком известных устройств является низкая производительность, обусловленная прерывным процессом технологических операций.
Це.ль изобретения - повьппение производи ел ьности устройства.
Це;п достигается тем, что устройство для загрузкн е.мкостей, содержащее транспортер Д.1Я набора ряда изделий, включающий в себя несколько параллельно расположенных на основании цепей и механизм перемещения емкостей, снабжено установленным между цепя.ми со стороны выдачи изделий с транспортера с возможностью пере.мещения в горизонтальной и вертикальной плоскостях посредством кривощипного механизма съемником, а механизм перемещения емкостей расцоложен параллельно продольной оси транспортера.
Кроме того, устройство снабжено фиксирующим приспособлением для съемника, включающим в себя упорную щайбу, управляемый упор и храповик.
Помимо этого, механизм перемеиления емкостей содержит два расположенных на основании параллельно цепных привода, цепи которых размещены на четырех звездочках с образованием треугольного контура с горизонтальным и вертикальным участками, и две рамы для емкости, расположенные между цепями.
Ири этом на основании наклонно расположены направляющие рельсы, а рамы снабжены опорными ролика.ми, установленными с возможностью взаимодействия с рельсами.
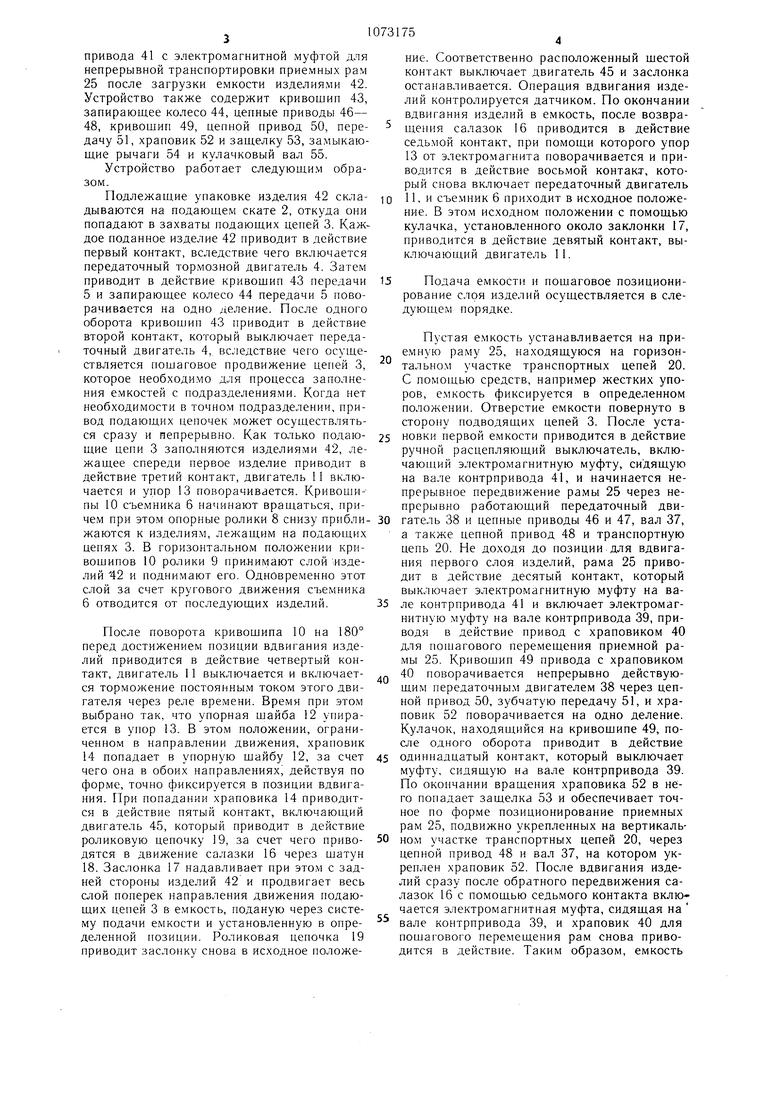
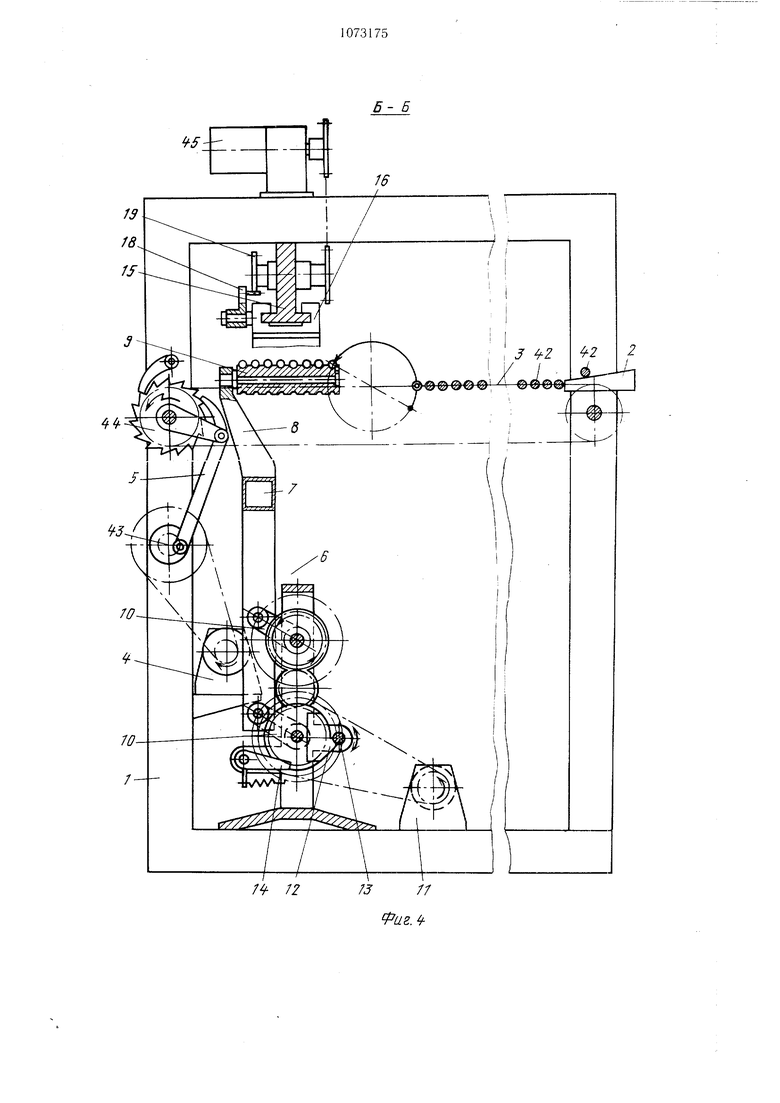
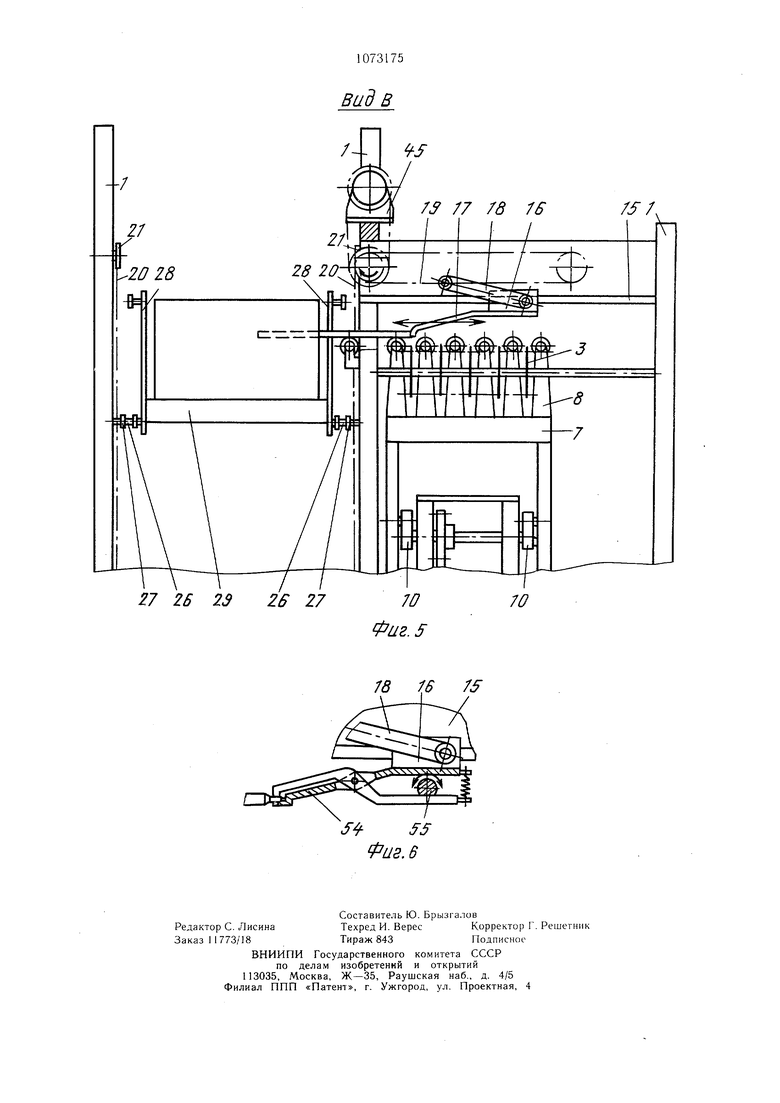
На фиг. 1 схематически изображено предлагаемое устройство, общий вид; на фиг. 2 то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - вид В на фиг. 1; на фиг. 6 - разгрузочное устройство.
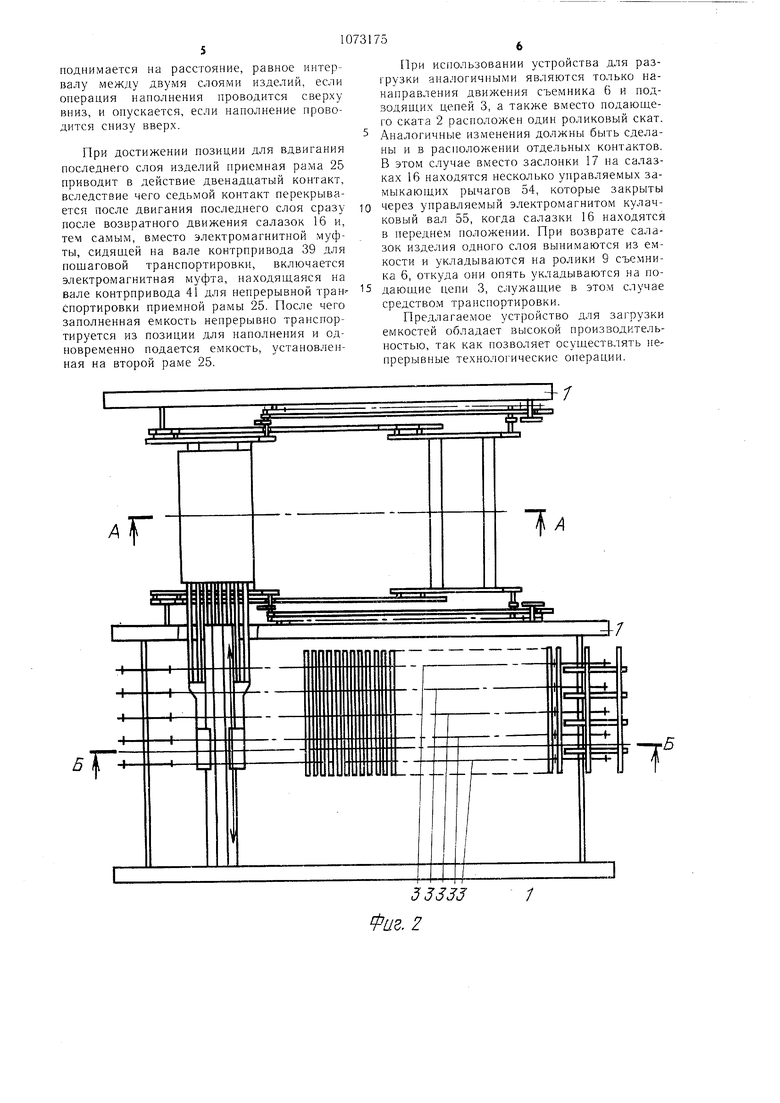
Устройство состоит из основания, образованного тремя вертикальными стенами Г, расположенного со стороны подачи изделий подающего ската 2, конец которого размещен над движущимися синхронно подающими цепями 3, снабженными профильными захватами (не показаны). Привод цепей 3 осуществляется с помощью приводного двигателя 4 через передачу 5 с запирающим кольцом. На стороне, противоположной подающему скату 2, под цепями 3 расположен съемник 6, на подъе.мных стержнях 7 которого смонтированы опорные ролики 8. Опорные ролики 8 и ролики 9 1)счсн;ли)жеиы между цепями 3. Привод съемника 6 осуществляется через четыре синхронно работающих кривопиша 10, которые, в свою очередь, приp,f) от редукторного тормозного двигателя 11. Для фиксирования положения съемника 6 имеется упорная Н1айба 12 вместе с управляюи им упором 13 и храповик 14. Над цепями 3 и съемником 6 расположен направляющий элемент 15, закрепленный на основании. На последнем установлены с возможностью перемещения салазки 16, на которых закреплена заслонка 17. Салазки 16 приводятся через щатун 18, который соединен с движущейся ро.шковой цепочкой 19. Механизм перемещения емкостей содержит рас5 положенные на повернутых друг к другу сторонах двух стен основания транспортные цепи 20, огибающие звездочки 21--24, расположенные так, что транспортные цепи 20 приходят между звездочками 24 и 21 вертикально вверх, между звездочками 21 и 22 - под углом 20° наклонно вниз, между звездочка.ми 22 и 23 - горизонтально и между звездочками 23 и 24 - под углом 45° нак юнно вниз. На ценях 20 на равных расстоя ниях установлены две приемные рамы 25 для емкостей с помощью болтов 26, на которых расположены опорные ролики 27. Приемные рамы 25 для емкостей состоят из двух угловых боковых частей 28, укрепленных между собой траверсами 29. Кроме расположенных вблизи наивысщих точек угловых боковых
0 частей 28 на болтах 26 опорных РО.ЛИКОВ 27, на концах перекладин боковых частей 28 находятся дополнительные опорные ролики 27. В зависимости от соответствующей позиции приемных рам 25 для емкостей эти опорные ролики 27 расположены в направля5 ющих рельсах 30 и 31, 32 и 33, а также 34 и 35 и, тем са.мым, поддерживают нрие.мные рамы для емкостей во время транспортировки. Направляющие рельсы закреплены на основании. Для поддержания перевода ири„ емных рам для е.мкостей из вертикального движения вверх в наклонное перемещение вниз и затем в горизонтальное положение на стенах 1 установлены поворотные колеса 36, которые движутся синхронно с транспорт, ными цепочками 20. Положение звездочек
5 21-24 на стенах 1 каркаса в зависи.мости от величины приемных ра.м 25 для е.мкостей и размера емкостей выбрано таким образом, что при транспортировке емкости остается свободное пространство для вала 37, с помощью которого осуществляется синхронный привод транспортных цепей.
Привод транспортных цепей 20 осуществляется от передаточного двигателя 38 через вал контрпривода 39 с электромагнитной муфтой и подводом с храповиком 40 для щаговой транспортировки приемных рам 25 для емкостей во время загрузки е.мкости и от приводного двигателя 4 - через вал контрпривода 41 с электромагнитной муфтой для непрерывной транспортировки приемных рам 25 после загрузки емкости изделиями 42. Устройство также содержит кривошип 43, запирающее колесо 44, цепные приводы 46- 48, кривошип 49, цепной привод 50, передачу 51, храповик 52 и защелку 53, замыкающие рычаги 54 и кулачковый вал 55.
Устройство работает следующим образом.
Подлежащие упаковке изделия 42 складываются на подающем скате 2, откуда они попадают в захваты подающих цепей 3. Каждое поданное изделие 42 приводит в действие первый контакт, вследствие чего включается передаточный тормозной двигатель 4. Затем приводит в действие кривошип 43 передачи
5и запирающее колесо 44 передачи 5 поворачивается на одно деление. После одного оборота кривошип 43 приводит в действие второй контакт, который выключает передаточный двигатель 4, вследствие чего осуществляется пошаговое продвижение цепей 3, которое необходимо для процесса заполнения емкостей с подразделениями. Когда пет необходимости в точном подразделении, привод подающих цепочек может осуществляться сразу и непрерывно. Как только подающие цепи 3 заполняются изделиями 42, лежащее спереди первое изделие приводит в действие третий контакт, двигатель 11 включается и упор 13 поворачивается. Кривошипы 10 съемника 6 начинают вращаться, причем при это.м опорные ролики 8 снизу приближаются к изделиям, лежащим на подающих цепях 3. В горизонтальном положении кривошипов 10 ролики 9 нри.нимают слой изделий 42 и поднимают его. Одновременно этот слой за счет кругового движения съемника
6отводится от последующих изделий.
После поворота кривошипа 10 на 180° перед достижением позиции вдвигания изделий приводится в действие четвертый контакт, двигатель 11 выключается и включается торможение постоянным током этого двигателя через реле времени. Время при этом выбрано так, что упорная шайба 12 упирается в упор 13. В этом положении, ограниченном в направлении движения, храповик 14 попадает в упорную шайбу 12, за счет чего она в обоих направлениях, действуя по форме, точно фиксируется в позиции вдвигания. При попадании храповика 14 приводится в действие пятый контакт, включающий двигатель 45, который приводит в действие роликовую цепочку 19, за счет чего приводятся в движение салазки 16 через шатун 18. Заслонка 17 надавливает при это.м с задней стороны изделий 42 и продвигает весь С/10Й поперек направления движения подающих цепей 3 в емкость, поданую через систему подачи емкости и установленную в определенной позиции. Роликовая цепочка 19 приводит засло} ку снова в исходное положение. Соответственно расположенный щестой контакт выключает двигатель 45 и заслонка останавливается. Операция вдвигания изделий контролируется датчиком. По окончании вдвигания изделий в емкость, после возвращепия салазок 16 приводится в действие седь.мой контакт, при помощи которого упор 13 от электро.магнита поворачивается и приводится в действие восьмой контакт, который снова включает передаточный двигатель 11, и съемник 6 приходит в исходное положение. В этом исходном положении с помощью кулачка, установленного около заклонки 17, приводится в действие девятый контакт, выключающий двигатель II.
Подача емкости и пощаговое позиционирование слоя изделий осуществляется в следующем порядке.
Пустая е.мкость устанавливается на приемную раму 25, находящуюся на горизонтальном участке транспортных цепей 20. С помощью средств, например жестких упоров, е.мкость фиксируется в определенном положении. Отверстие емкости повернуто в сторону подводящих цепей 3. После уста5 новки первой емкости приводится в действие ручной расцепляющий выключатель, включающий электромагнитную муфту, сидящую на вале контрпривода 41, и начинается непрерывное передвижение рамы 25 через непрерывно работающий передаточный дви0 гатель 38 и цепные приводы 46 и 47, вал 37, а также цепной привод 48 и транспортную цепь 20. Не доходя до позиции для вдвигания первого слоя изделий, рама 25 приводит в действие десятый контакт, который выключает электромагнитную муфту на ва5 ле контрпривода 41 и включает электромагнитную .муфту на вале контрпривода 39, приводя в действие привод с храповиком 40 для пошагового перемещения приемной рамы 25. Кривошип 49 привода с храповиком
.. 40 поворачивается непрерывно действующим передаточны.м двигателем 38 через цепной привод 50, зубчатую передачу 51, и храповик 52 поворачивается на одно деление. Кулачок, находящийся на кривошипе 49, после одного оборота приводит в действие
5 одиннадцатый контакт, который выключает муфту, сидящую на вале контрпривода 39. По окончании вращения храповика 52 в него попадает защелка 53 и обеспечивает точное по форме позиционирование приемных рам 25, подвижно укрепленных на вертикаль0 ном участке транспортных цепей 20, через цепной привод 48 и вал 37, на котором укреплен храповик 52. После вдвигания изделий сразу после обратного передвижения салазок 16 с помощью седьмого контакта включается электромагнитная муфта, сидящая на
вале контрпривода 39, и храповик 40 для пошагового перемещения рам снова приводится в действие. Таким образом, емкость поднимается на расстояние, равное интервалу между двумя слоями изделий, если операция наполнения проводится сверху вниз, и опускается, если наполнение проводится снизу вверх. При достижении позиции для вдвигания последнего слоя изделий приемная рама 25 приводит в действие двенадцатый коптакт, вследствие чего седьмой контакт перекрывается после двигания последнего слоя сразу после возвратного движения салазок 16 и, тем самым, вместо электромагнитной муфты, сидящей на вале контрпривода 39 для пошаговой транспортировки, включается электромагнитная муфта, находящаяся на вале контрпривода 41 для непрерывной тран спортировки приемной рамы 25. После чего заполненная емкость непрерывно транспортируется из позиции для паполнепия и одновременно подается емкость, установленная на второй раме 25. При использовании устройства для разгрузки аналогичпыми являются только панаправления движения съемника 6 и подводящих цепей 3, а также вместо подающего ската 2 расположен один роликовый скат. Аналогичные изменения должны быть сделаны и в расположении отдельных контактов. В этом случае вместо заслонки 17 па салазках 16 находятся несколько управляемых замыкающих рычагов 54, которые закрыты через управляемый электромагнитом кулачковый вал 55, когда салазки 16 находятся в переднем положении. При возврате салазок изделия одного слоя вынимаются из емкости и укладываются на ролики 9 съемника 6, откуда они опять укладываются на подающие цепи 3, служащие в этом случае средством транспортировки. Предлагаемое устройство для загрузки емкостей обладает высокой производительностью, так как позволяет осуществлять непрерывные технологические операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортирующее устройство для передачи, например, книжных блоков, в полиграфическом производстве | 1957 |
|
SU114516A1 |
| РАССАДОПОСАДОЧНАЯ МАШИНА | 1996 |
|
RU2102852C1 |
| Установка для производства формового мармелада | 1985 |
|
SU1340714A1 |
| Устройство для производства хлебного изделия | 1984 |
|
SU1405764A1 |
| Машина для устройства горизонтальной разметки | 1988 |
|
SU1599462A1 |
| УСТРОЙСТВО для ШТАБЕЛИРОВАНИЯ ЯЩИКОВ | 1972 |
|
SU327111A1 |
| Устройство для крашения пряжи | 1988 |
|
SU1553591A1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ДРЕНАЖНЫХ ТРУБ | 1970 |
|
SU271358A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ СЕМЕННЫХ ЛЕНТ | 1996 |
|
RU2103855C1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |
1. УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЕМКОСТЕЙ, содержащее транспортер для набора ряда изделий, включающий в себя несколько параллельно расположенных на основании цепей и механизм перемещения емкостей, отличающееся тем, что оно снабжено установленным между цепями со стороны выдачи изделий с транспортера с возможностью перемещения в горизонтальной и вертикальной плоскостях посредством кривошипного механизма съемником, а мехаВ низм перемещения е.мкостеи расположен параллельно продольной оси транспортера. 2.Устройство по п. 1, отличающееся тем, что оно снабжено фиксирующим приспособлением для съемника, включающим в себя упорную шайбу, управляемый упор и храповик. 3.Устройство по пп. 1 и 2, отличающееся тем, что механизм перемещения емкостей содержит два расположенных на основании параллельно ценных привода, цепи которых размещены на четырех звездочках с образованием треугольного контура с горизонтальным и вертикальным участками, и две рамы для емкости, расположенные между цепями. 4.Устройство по пп. 1-3, отличающееся & тем, что на основании наклонно расположены направляющие рельсы, а рамы снабже(Л ны опорными роликами, установленными с возможностью взаимодействия с рельсами. ОО СЛ
А
I А
JJJJJ из. 2 32 а /
А - А 272L 30
