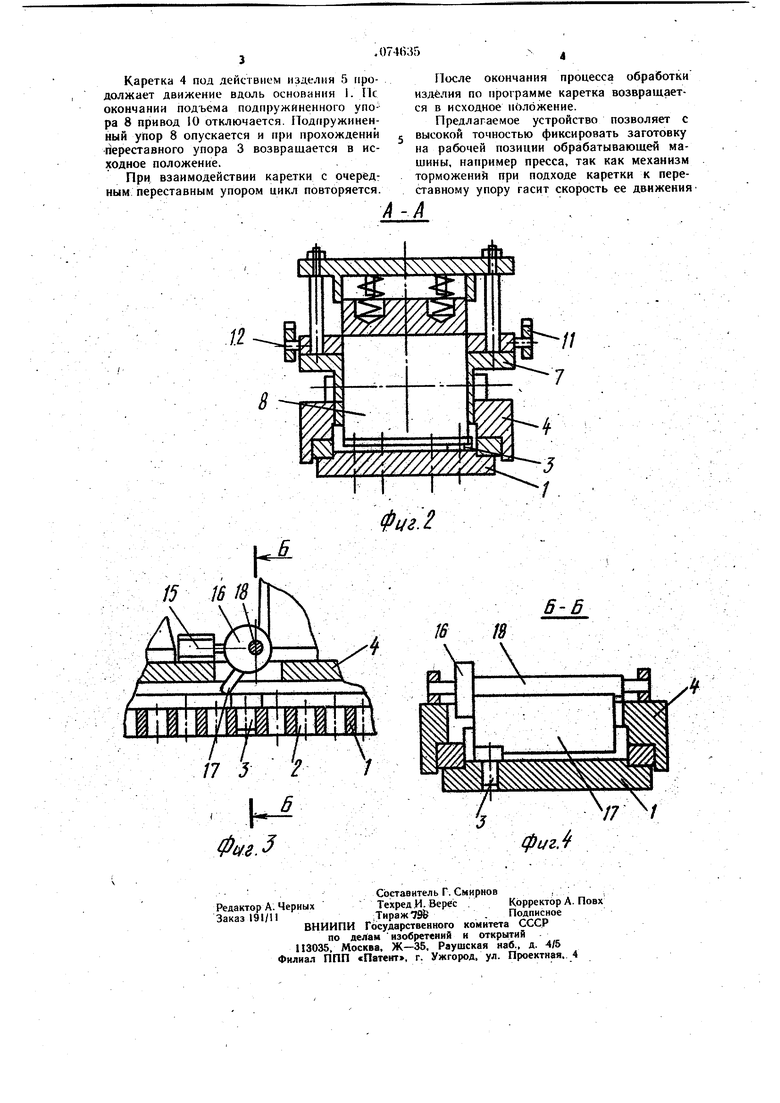
Изобретение относится к обработке металлов давлением и может быть использовано в различных отраслях машиностроения при изготовлении длинномерных изделий для фиксации заготовки на рабочей позиции обрабатывающей машины, например пресса. Наиболее близким к изобретению является устройство для фиксации длинномерных заготовок на рабочей позиции обра.батываюшей машины, например пресса, содержащее основание с гнездами и размещенными в них переставными упорами, установленную на основании с возможностью перемещения каретку, несущую подпружиненный упор, смонтированный с возможностью взаимодействия с одним из переставных упоров (}. Устройство недостаточно точно фиксирует заготовки на рабочей позиции, так как при встрече подпружиненного упора каретки с переставным упором возможен отход каретки, а следовательно, и фиксируемой ею заготовки.. Целью изобретения является повышение точности фиксации. Для достижения поставленной цели устройство для фиксаций длинномерных заготовок на рабочей позиции обрабатывающей машины, напри мер пресса содержащее основание с гнездами и размещенными в них переставными упорами, установленную на основании с возможностью перемещения вдоль основания каретку, несущую подпружиненный упор, смонтированный с возможностью взаимодействия с одним из переставных упоров, снабжено узлом торможе: НИИ перемещения каретки, содержащим электромагнит, размещенный на каретке с возможностью взаимодействня с основанием, и cifCTeMy его включения. При этом система включения выполнена в виде закрепленных на каретке поворотного sKcUeHtpHKa и датчика, электрй.ческн связанного с электромагнитом,флажка, установленного на эксцентрике с возможностью взаимодействия с датчиком и одним на переставных упоров. На фиг. 1 изображено устройство, общнй вид; на фиг. 2 - разрез А-А на фиг. i; иа фиг. 3 - положение эксцентрика с флажком в момент взаимодействия последнего с одним нз переставных упоров; на фнг. 4 - разрез Б-Б на фиг. 3. , Устройство содержит основание 1 с расположенными в нем гнездами 2 для переставных упоров 3. Гнезда 2 основания 1 могут быть расположены в один или более рядов. На основании 1 установлена каретка 4, которая имеет возможность перемещения вдоль основания 1 под действием изделия 5, соприкасающегося с ней своим передним торцом. На каретке 4 шарнирно с помощью оси 6 установлен корпус 7, в котором размещен подпружиненный упор 8. Корпус 7 удерживается в исходном положении с помоц1ью пружины 9. Подпружиненный упор 8 имеет возможность взаимодействия-с переставными упорами 3. Подъем подпружиненного упора 8 осуществляется с помощью привода 10, установленного на каретке 4, рычага 11 и планки 12, размещенной в корпусе 7. Датчик 13, размещенный на каретке 4, .позволяет управлять исполнительным органом обрабатывающей машины и приводом перемещения 5 (изображены) при взаимодействии с корпусом 7. Каретка 4 снабжена механизмом торможения, выполненным в виде электромагнита 14, электрически связанного с датчиком 15управления, и эксцентрика 16 с флажком 17. Эксцентрик 16 насажен на палец 18 и может поворачиваться при взаимодействии флажка 17 с переставным упором 3 и действовать на датчик управления 15. Эксцентрик 16 размещен перед кареткой так, что он опережает подпружиненный упор рабочем движении каретки, обеспечивая ее торможение. Устройство работает следующим образом. В соответствии с программой обработки заготовки в гнезда 2 основания 1 устанавливаются переставные упоры 3. Изделие 5 при дни жен ни .через зону обработки действует своим передним торцом на каретку 4,перемещая ее вдоль основания 1. Флажок 17 упирается в переставной упор 3 и отклоняется, иоворачивая эксцентрик 16на пальце 18. При этом эксцентрик 16 взаимодействует с датчиком 15 управления, который включает электромагнит 14. Начинается торможение каретки. При дальнейшем движении каретки с затуханэщей скоростью к переставному упору 3 приближается подпружиненный упор 8. При взаимо.действгш подпружиненного упора 8 с упором 3 корпус 7 отклоняется, поворачивается вокруг оси 6 и действует на датчик 13. В результате привод перемещения изделия отключается, исполнительный орган обрабатывающей машинь выполняет операцию обработки изделия, например рубку, пробивку отверстий и т. д. По окончании операции обработки исполнительный орган дает команду на включение привода 10, который через рычаг II и планку 12 осуществляет подъем подпружиненного упора 8 в корпусе 7. Под действием пружины 9 корпус 7 возвращается в исходное Положение, отключая Датчик 12. При этом отключается электро.магнит 14 и включается механизм перемещения изделия для подачи есо на очередную операцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения деталей из длинномерного материала | 1978 |
|
SU770619A1 |
| Устройство для загрузки изделий, преимущественно оснований корпусов интегральных схем, в кассеты | 1989 |
|
SU1762431A1 |
| Устройство для позиционированиядлиННОМЕРНыХ зАгОТОВОК | 1978 |
|
SU795649A1 |
| Перекладчик заготовок | 1989 |
|
SU1691290A1 |
| Устройство для обработки длинномерного материала | 1981 |
|
SU1017413A1 |
| Устройство для подачи и отбраковки упакованных предметов | 1987 |
|
SU1502421A1 |
| Автоматическая линия для упаковывания ампул | 1987 |
|
SU1521663A1 |
| Устройство для подачи и отбраковки упаковываемых предметов | 1987 |
|
SU1495211A2 |
| Способ обработки длинномерного проката и автоматический комплекс для его осуществления | 1987 |
|
SU1625557A1 |
| УСТРОЙСТВО ДЛЯ РАЗОБЩЕНИЯ ПАЧЕК ДЛИННОМЕРНЫХ ГРУЗОВ | 1992 |
|
RU2067073C1 |
1. УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ДЛИННОМЕРНЫХ ЗАГОТОВОК НА РАБОЧЕЙ ПОЗИЦИИ ОБРАБАТЫВАЮЩЕЙ МАШИНЫ, например пресса, содержащее основание с гнездами и разме5. /J 7 I J f фг щенными в них переставными упорами, установленную на основании с возможностью перемещения вдоль основания каретку, несущую подпружиненный упор, смонтированный с возможностью взаимодействия с одним из переставных упоров, отличающееся тем, что, с целью повыщения точности фиксации, оно снабжено узлом торможения перемещения каретки, содержащим электромагнит, размещенный на каретке с возможностью взаимодействия с основанием, и систему его включения. 2. Устройство по п. Ij отличающееся тем, что система включения выполнена в виде закрепленных на каретке поворотного эксцентрика и датчика, электрически связанного с электромагнитом, флажка, установленного на эксцентрике с возможностью взаимодействия с датчиком и одним из переставных упоров. /8 / 
| I | |||
| Устройство для позиционированиядлиННОМЕРНыХ зАгОТОВОК | 1978 |
|
SU795649A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
