Изобретение относится к машиностроению, а именно к средствам автоматизации технологических процессов производства деталей и может быть использовано, например, в штамповочном производстве.
Цель изобретения - упрощение конструкции за счет уменьшения числа приводных двигателей.
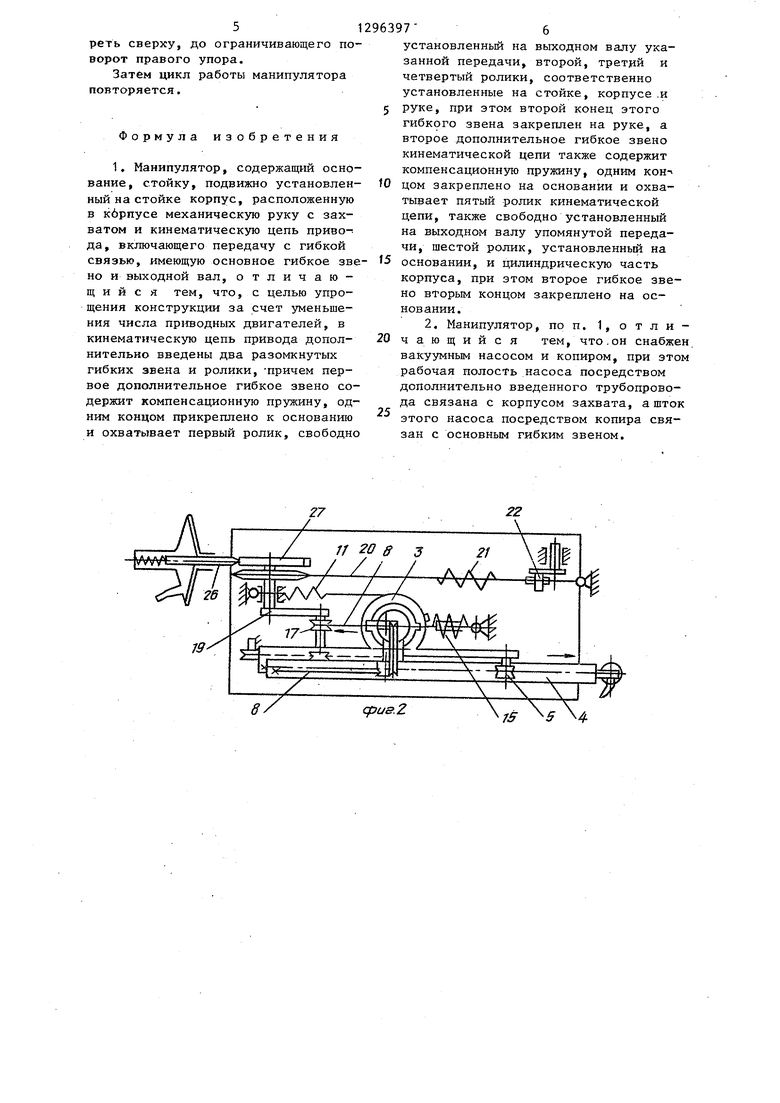
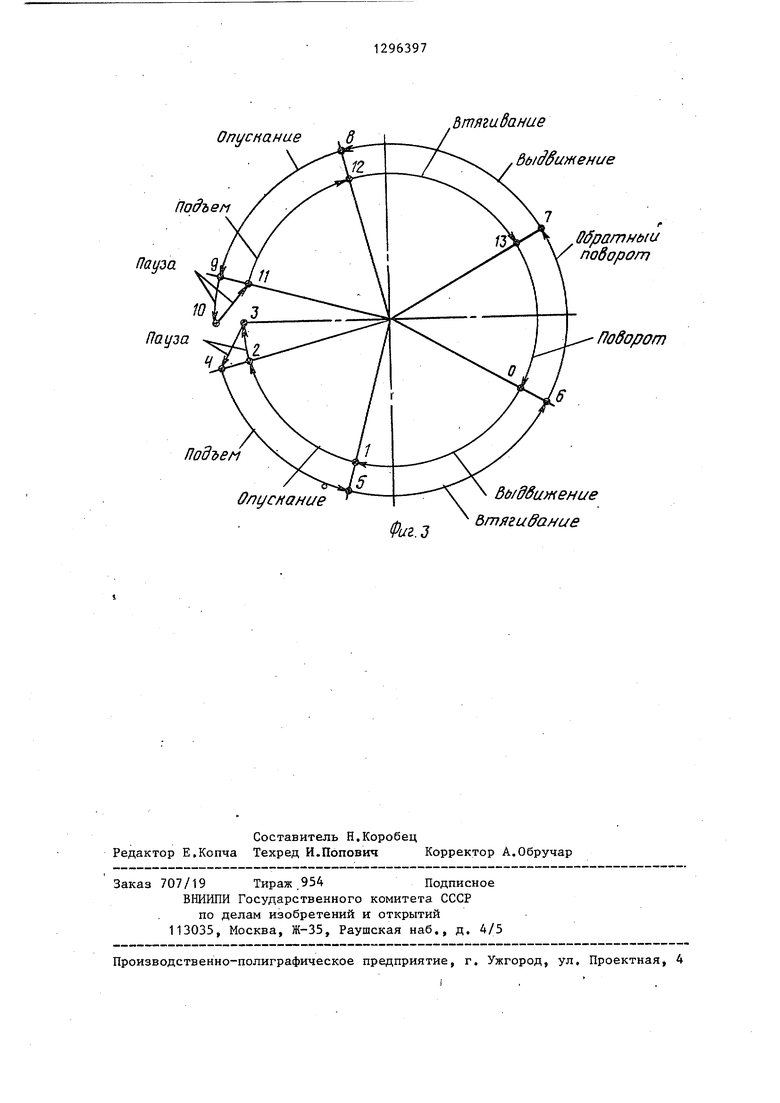
На фиг. 1 схематически изображен манипулятор, общий вид{ на фиг, 2 - то же, вид сверху; на фиг, 3 - схема работы манипулятора.
Манипулятор состоит из основания
1,на котором установлена цилиндрическая стойка 2, несущая корпус 3,
.посаженный на нее центральным отверстием с возмолшостыо продольного и углового смещения и несущий механическую руку 4, выполненную в виде штанги, размещенной с возможностью, прямолинейного перемещения между направляющими роликами 5 корпуса 3, механизма вертикального перемещения механической руки, включающего пару продольного скольжения:, стойка 2 - корпус 3 с упорами 6 и 7 на стойке
2,гибкое звено 8 и возвратную пружину 9 сжатия, расположенную между упором 6 и нижним торцом корпуса 3, механизма горизонтального перемещения механической руки, состоящего из механизма поворота механической руки, включающего шарнирную пару скольжения: стойка 2 - корпус 3 с двумя упорами, ограничивающими поворот корпуса 3 относительно стойки 2 в обе стороны (упоры не показаны) , гибкое звено 10, которое огибает цилиндрическую часть поверхности корщ са 3, возвратную прзокину 11 растяжений с неподвижно зафиксированным одним концом, и механизма прямолинейного перемещения механической руки, включающего линейную кинематическую пару: корпус 3 - рука 4 с упорами 12 и 13 на корпусе 3, гибкое звено 8, которое закреплено одним концом на механической руке 4, и возвратную пружину 14 растяжения, закрепленную одним концом па корпусе 3, а другим - на механической руке 4, Гибкие звенья включают компенсационные пружины 15 и 16 растяжений с телескопическим ограничителем сжатия с неподвюкно зафиксированными одними концами и другими -концами, соединенными с гибкими звеньями 8 и 10, огибающими шарнирные ролики 17, установленные на- выходном валу передачи с гибкой связью привода, при этом возвратные и компен- сационные пружины подобраны такими, что сила пружины 15 больше суммы сил пружин 14 и 9, сила пружины 9 больше силы 14, а сила пружины 16 больше силы пружины 11,
Привод выполнен в виде вертикально установленного на основании 1 ведомого колеса 18 с выходным валом 19, на котором размещены шарнирные ролики 17, и цепи 20, огибающей колесо 18 и одним концом соединенной с возвратной пружиной 21 растяжения, второй конец которой зафиксирован неподвижно, а другим - шарнирно закрепленной на конце входного вала
22 .двигателя, установленного также на основании 1.
Механическая рука 4 манипулятора снабжена вакуумным захватом 23, сое- диненным гибким трубопроводом 24 с установленным на основании 1 мембранным вакуумным насосом 25, подпружиненный рабочий шток 26 которого упирается в кулачковьш копир 27 ведомо- го колеса 18,
Манипулятор работает следующим образом.
В исходном положении рука 4 находится в крайнем верхнем положении и втянута, а ролики 17 выходного вала
19занимают положение, показанное на фиг, 1 и обозначенное на фиг, 3 позицией О,
При движении входного вала 22 двигателя по часовой стрелке из положения, показанного на фиг, 1, цепь
20под действием пружины 21 смещается, поворачивая колесо 18 и соответственно выходной вал 19 с роликами 17 по часовой стрелке, В исходном положении корпус 3 с рукой 4 находится в крайнем правом угловом положении - упирается в правый упор, ограничивающий поворот корпуса 3
по часовой стрелке, если смотреть сверху, поэтому при перемещении роликов 17 из позиции О в позицию 1 пружина 11 нагружена: находится в растянутом состоянии и в работе не
участвует, а растягивается прулсина 16, предотвращая обрыв гибкого Звена 10, так как усилие срабатывания (возврата в исходное состояние) npji жины 11 меньше усилия, необходимого
для растяжения пружины 16, Одновре- , менно смещается гибкое звено 8, выдвигая руку 4 и растягивая пружину 14,. при этом пружины 9 и 15 неподвижны, так как для их соответственно сжатия и растяжения необходимо усилие большее, чем для пружины 14, Когда рука 4 своим выступом упирается в упор.13 корпуса 3, выдвижение руки заканчивается, в этот момент ролики. 17 занимают позицию 1, На фиг, 1 и 2 стрелками показаны направления движения конструктивных элементов манипулятора во время выдвижения руки 4,
При перемещении роликов 17 из позиции 1 в позицию 2 пружина 11 остается неподвижной, а пружина 16 продолжает растягиваться, предотвращая обрыв, и затем сжиматься, сохраняя натяжение гибкого звена 10, Продолжающееся смещаться гибкое звено 8, сжимая пружину 9, опускает корпус 3 с рукой 4 до упора 6, при зтом пружины 14 и 15 неподвижны, так как упор 13 предохраняет пружину 14 от дальнешиего растяжения, а для растяжения пружины 15 необходимо уси- ,лие большее, чем для пружины 9,
Во время перемещения роликов 17 из позиции 2 в позицию 3 работа гибкого звена 10 аналогична работе предыдущего режима, а упор 6 предохраfO
сжимается, сохраняя натяжение гибкого звена 8, Пауза продолжается.
Во время вращения колеса 18 насос 25 постоянно упирается подпружиненным штоком 26 в кулачковый копир 27 колеса 18 и в интервале позиций 0-2 включен, а в паузе - между позициями 2 и 4 шток 26, соединенный с мембраной насоса 25, выключает и включает насос, после чего деталь за счет разности давлений прижимается к захвату 23,
При перемещении роликов 17 из позиции 4 в позицию 5 работа гибко- .5 го звена 10 аналогична работе пре- дьщущего режима: пружина 16 сжимается, при этом разжимается пружина 9, поднимая корпус 3 с вьщвинутой рукой 4 и прижатой к захвату 23 деталью до упора 7,
При перемещении роликов 17 из позиции 5 в позицию 6 пружина 16 продолжает сжиматься, а в поднятом корпусе 3 под действием сжимающейся пружины 14 втягивается 4 с деталью до упора 12,
При перемещении роликов 17 из позиции 6 в позицию 7 гибкое звено 8
сначала ослабляется, затем натягивается, пружины 15, Г4 и 9 неподвижны, а пружина 16 сжата, сжимается пружина 11, поворачивая поднятый корпус 3 с втянутой рукой 4 с деталью.
20
25
30
опирающейся на разжатую пружину 9. няет пружину 9 от дальнейшего сжатия, г
I,35 против часовой стрелки, если смотт.е, пружина 9 также, как и пружина
- реть сверху до ограничивающего пово14, неподвижна, при этом сжимается
пружина 15, предотвращая обрыв гибкого звена 8, Во время паузы рука 4
1-1 Г
40
рот левого упора.
23
вьщвинута и опущена и захватом упирается в деталь.
При достижении роликами 17 позиции 3 входной вал 22, продолжая движение по часовой стрелке, проходит .свое крайнее положение, после кото- 45 рого пружина 21 перестает сжиматься и смещать на себя цепь 20, так как шарнирный конец входного вала 22, к которому прикреплена цепь 20, перестает приближаться к колесу 18 и 0 начинает удаляться, перемещая цепь 20 в обратном направлении, в результате чего колесо 18 движется против часовой стрелки.
Во время перемещения роликов 17 из позиции 3 в позицию 4 работа гиб-- кого звена 10 обратна предыдущей, при зтом работа гибкого звена 8 также обратна предьщущей: пружина 15
При дальнейшем перемещении роликов 17 в интервале позиций 7-13 рабо та манипулятора повторяется, т.е, ру ка 4 выдвигается и опускается и после паузы поднимается и втягивается, с той разницей, что гибкое звено 10 сначала ослабляется, затем натягивается при неподвьганой сжатой пружине. 16, а деталь при отключенном насосе 25 во время середины паузы отсоединяется от захвата- 23, например за счет силы тяжести детали, .
При возврате манипулятора без детали в исходное положение: при перемещении роликов 17 из позиции 13 в позицию О, выходной вал 19, поворачиваясь по часовой стрелке при неподвижной пружине 16 с помощью гибкого звена 10, поворачивает поднятый корпус 3 с втянутой рукой 4 без детали по часовой стрелке, если смог
сжимается, сохраняя натяжение гибкого звена 8, Пауза продолжается.
Во время вращения колеса 18 насос 25 постоянно упирается подпружиненным штоком 26 в кулачковый копир 27 колеса 18 и в интервале позиций 0-2 включен, а в паузе - между позициями 2 и 4 шток 26, соединенный с мембраной насоса 25, выключает и включает насос, после чего деталь за счет разности давлений прижимается к захвату 23,
При перемещении роликов 17 из позиции 4 в позицию 5 работа гибко- .5 го звена 10 аналогична работе пре- дьщущего режима: пружина 16 сжимается, при этом разжимается пружина 9, поднимая корпус 3 с вьщвинутой рукой 4 и прижатой к захвату 23 деталью до упора 7,
При перемещении роликов 17 из позиции 5 в позицию 6 пружина 16 продолжает сжиматься, а в поднятом корпусе 3 под действием сжимающейся пружины 14 втягивается 4 с деталью до упора 12,
При перемещении роликов 17 из позиции 6 в позицию 7 гибкое звено 8
|
сначала ослабляется, затем натягивается, пружины 15, Г4 и 9 неподвижны, а пружина 16 сжата, сжимается пружина 11, поворачивая поднятый кор пус 3 с втянутой рукой 4 с деталью.
0
5
0
рот левого упора.
При дальнейшем перемещении роликов 17 в интервале позиций 7-13 работа манипулятора повторяется, т.е, рука 4 выдвигается и опускается и после паузы поднимается и втягивается, с той разницей, что гибкое звено 10 сначала ослабляется, затем натягивается при неподвьганой сжатой пружине. 16, а деталь при отключенном насосе 25 во время середины паузы отсоединяется от захвата- 23, например за счет силы тяжести детали, .
При возврате манипулятора без детали в исходное положение: при перемещении роликов 17 из позиции 13 в позицию О, выходной вал 19, поворачиваясь по часовой стрелке при неподвижной пружине 16 с помощью гибкого звена 10, поворачивает поднятый корпус 3 с втянутой рукой 4 без детали по часовой стрелке, если смогреть сверху, до ограничивающего поворот правого упора.
Затем цикл работы манипулятора повторяется.
Формула изобретения
1. Манипулятор, содержащий основание, стойку, подвижно установленный на стойке корпус, расположенную в кбрпусе механическую руку с захватом и кинематическую цепь привода, включающего передачу с гибкой связью, имеющую основное гибкое зве но и выходной вал, отличающийся тем, что, с целью упрощения конструкции за счет уменьшения числа пp iвoдныx двигателей, в кинематическую цепь привода дополнительно введены два разомкнутых гибких звена и ролики, -причем первое дополнительное гибкое звено содержит компенсационную пружину, одним концом прикреплено к основанию и охватывает первый ролик, свободно
10
15
20
25
установленный на выходном валу указанной передачи, второй, третей и четвертый ролики, соответственно установленные на стойке, корпусе .и руке, при этом второй конец этого гибкого звена закреплен на руке, а второе дополнительное гибкое звено кинематической цепи также содержит компенсационную пружину, одним кон- цом закреплено на основании и охватывает пятый ролик кинематической цепи, также свободно установленный на выходном валу упомянутой передачи, шестой ролик, установленный на основании, и цилиндрическую часть корпуса, при этом второе гибкое звено вторым концом закреплено на основании.
2. Манипулятор, по п. 1, отличающийся тем, что.он снабжен. вакуумным насосом и копиром, при этом рабочая полость насоса посредством дополнительно введенного трубопровода связана с корпусом захвата, а шток этого насоса посредством копира связан с основным гибким звеном.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1202861A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Манипулятор | 1979 |
|
SU841960A1 |
| Манипулятор | 1985 |
|
SU1321577A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1985 |
|
SU1663034A1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |
| Манипулятор | 1983 |
|
SU1154085A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
Изобретение относится к машиностроению, а именно к средствам автоматизации технологических процессов производства деталей, и может быть использовано, например, в штамповочном производстве. Целью изобретения является упрощение конструкции за счет уменьшения числа приводных двигателей. Кинематическая цепь привода для вертикального и горизонтального перемеш;ений механической руки 4 выполнена в виде двух разомкнутых гибких звеньев 8 и 10. Гибкое звено 8 содержит компенсационную пружину 15, одним концом прикреплено к основанию 1 и охватьшает первый ролик 17, свободно установленный на выходном валу 19 передачи с гибкой связью, и ролики соответственно установленные на стойке 2, корпусе 3 и руке 4. При этом второй конец гибкого звена закреплен на руке. Гибкое звено 10 также содержит компенсационную пружину 16, одним концом закреплено на основании и охватывает второй ролик, свободно установленный на выходном валу упомянутой передачи, а также ролик, установленный на основании, охватывает цршиндрическую часть корпуса и вторым концом закреплено на основании. 1 з.п. ф-лы, 3 ил. 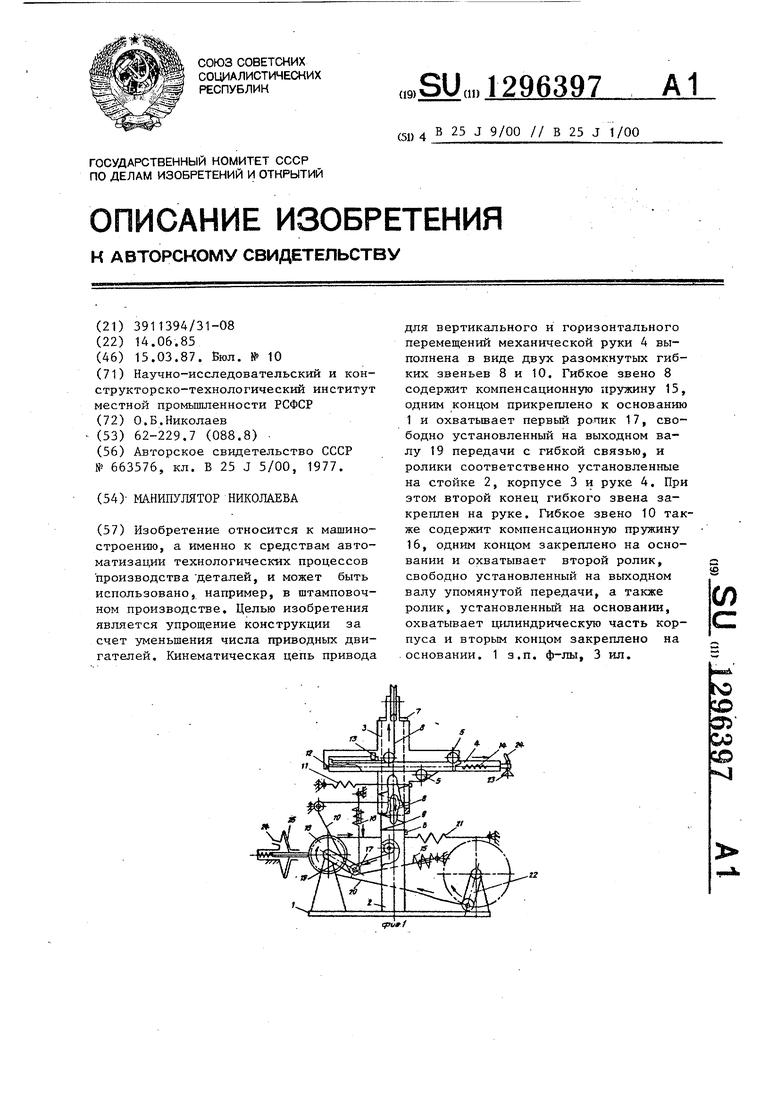
cpua.Z
15 5 4
Опуснание 6
flodbefi
Пауза
Пауза
Подъем
Олуснание
дтягибанае
Вд/ итение
Обратный no6opofrj
Поворот
Фиг.З
5б/9ви мение дтягивание
| Манипулятор | 1977 |
|
SU663576A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
