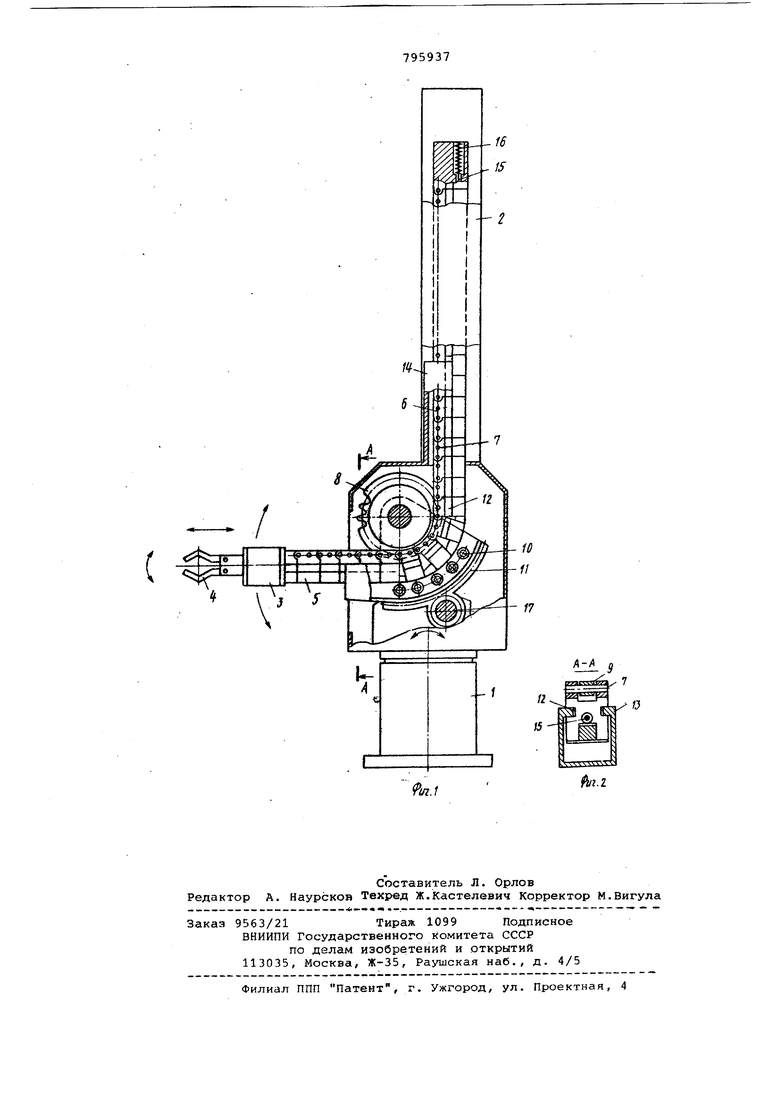
(54) МАНИПУЛЯТОР 13 зубчатого сектора 11,установленного на корпусе 2 манипулятора, и вертикальными направлякяо ими 14 корпуса 2, за счет которых цепь 5 не может самопроизвольно ломаться при вращении звездочки 8 в Hanfjasлении против часовой стрелки. При вращении звездочки 8 по часовой стрелке цепи 5 не позволяют самопроизвольно поворачиваться силы гравитации. Силовое замыкание звень 6 цепи 5 осуществляется с помощью троса 1.5, проходящего через все звенья б, и натяжной пружины 16. Поворот манипулятора вокруг вертикальной оси осуществляется с по.мощью электропривод.а, установленного на неподвижном основании 1 (не показан), Качание руки 3 осуществляется от электропривода, установленного в корпусе 2 и взаимодействующего через шестерню 17 с зубчатым сектором 11, центр качания которого совмещен с центром вращения звездоч ки 8. Манипулятор работает следующим образом. По сигналам от системы управления манипулятором три его приводных двигателя приходят в движение (вмес или поочередно в зависимости от необходимости) . При &ТОМ корпус 2 ма нипулятора вместе с рукой 3 повора чивается относительно неподвижного основания 1 до нужного азимутально го направления. Необходимое перемещение Захватно го устройства 4 по высоте обеспечивается качанием руки 3 за счет поворота зубчатого сектора 11 при вращении шестерни 17 от электропри вода. При этом обкатка звеньев б цепи 5 с увеличением коэффициента пер крытия зубьев звездочки 8 прои ходит при вращении шестерни 17 прю тив часовой стрелки, и рука 3 поднимается вверх. При вращении шесте ни 17 по часовой стреяке зубчатый сектор .11 поворачивается против ч совой стрелки,)меньшее число звень б цепи 5 входит в зацепле ние со зв дочкой 8, и рука 3 оцускается. Необходимое радиальное выдвижение захватного устройства 4 обеспечиватся выдвижением или втягиванием руки 3 от электропривода, взаимодействующего через звездочку 8 на звенья б цепи 5. При вращении звездочки 8 по часовой стрелке рука 3 вьдвигается, а при вращении звездочки 8 против часовой стрелки рука 3 втягивается. Когда все три привода манипулятора отработают задамщие сигналы, захватное устройство 4 манипулятора выходит в заданную точку рабочей зоны, срабатывает механизм захвата, деталь или заготовка зажимается и переносится в любую другую точку рабочей зоны. Предлагаемый манипулятор занимает ограниченную производственную площадь и может работать в горизонтальных и . наклонных шахтах, имея при этом хорошую маневренность, что позволяе ему иметь преимущества при работе в стесненных условиях, а также при создании новых производств с оптимальной и компактной компоновкой оборудования. Формула изобретения Манипулятор, содержащий основание, корпус, поворотное устройство, механическую руку,выполненную в виде втулочно-пальцевой цепи, на рабочем конце которой установлено захватное устройство, а другой конец цепи размещен в вертикальных направляющих, и механизм вьщвижения руки, содержащий приводную звездочку, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен расположенным в корпусе механизмом качаиия руки, выполненнс в виде поворотного сектора с расположенными на его торце направляющими роликами, установленного соосно со звездочкой ме ханиьма вьивижения руки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 524596, кл. В 25 J 5/02, 1975.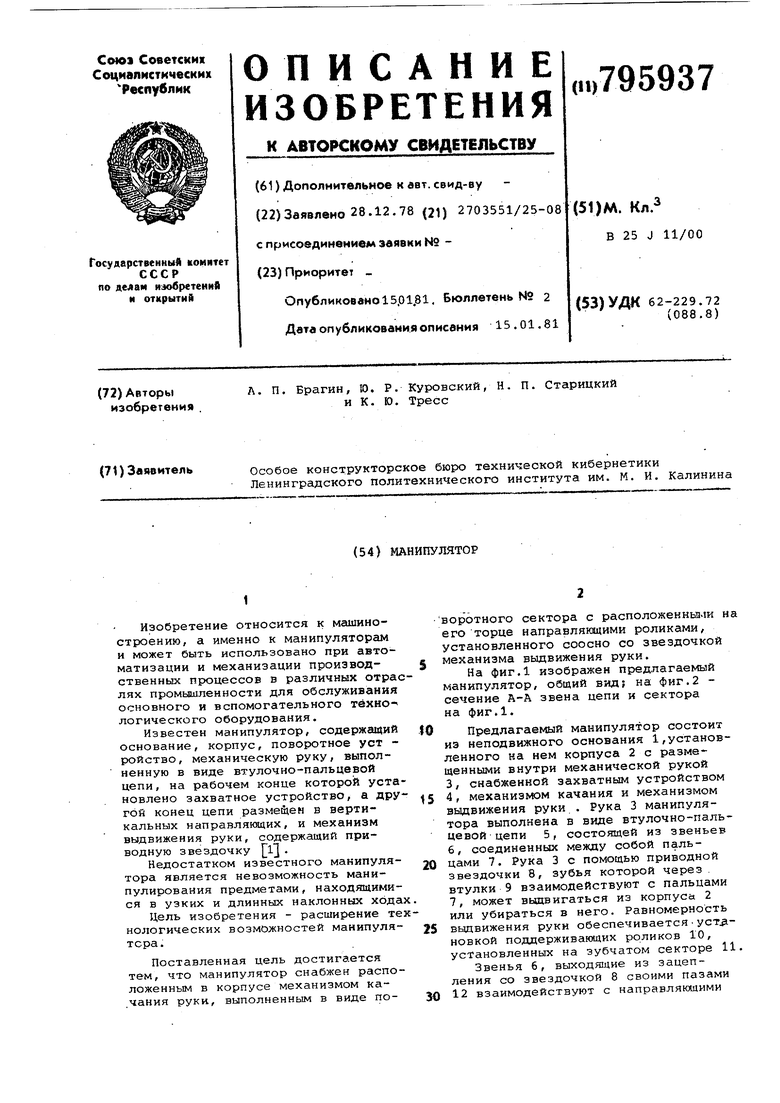
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Рука манипулятора | 1983 |
|
SU1076276A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| Устройство для перегрузки изделий | 1989 |
|
SU1668129A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| Манипулятор | 1984 |
|
SU1217652A1 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ НА ВНУТРЕННЮЮ ПОВЕРХНОСТЬ СТЕКЛЯННЫХ КОЛБ СВЕТИЛЬНИКОВ С ПОСЛЕДУЮЩИМ ОБЖИГОМ ГАЗОВЫМИ ГОРЕЛКАМИ | 2002 |
|
RU2256977C2 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |