.
///////////////////////////////////////////////////
сл
со
00
jO vj
Изобретение относится к сельскому хозяйству, в частности к групповому В(ждению самоходных сельскохозяйственных агрегатов или одного агрегата по параллельным траекториям, и может применяться в других областях техники, где необходимо иметь параллельные траектории.
Целью изобретения является упрощение конструкции и повьпиение надежности.
На чертеже показано предлагаемое
yCTpOflCTBO.
Устройство содержит формирователи I и 2 основной 3 и дополнительной 4 световых плоскостей, фотоприемную линейку 5 с фоточувствительнь ми ячейками 6, блок 7 электроники, привод 8 рулевого механизма агрегата 9.
Устройств(5 работает следующим образом.
При отклонении агрегата 9 по вертикали расстояние между освещенными ячейками не меняется и на выходе блока 7 электроники не вырабатывается корректирующий сигнал. При отклонении агрегата 9 от траектории движения меняется расстояние между фазо- чувствительными ячейками 6 и на выходе блока 7 вырабатывается пропорциональный этому изменению сигнал, который и воздействует на привод 8 рулевого механизма или индицируется на приборной панели, сигнализируя водителю о необходимости корректировки по соответствующему направлению.
Устройство позволяет исключить все механические части следящей сис- TeNfb фотоприемников и тем самым существенно упростить конструкцию и повысить производительность за счет увеличения скорости слежения; повысить точность и надежность устройства .
Формула изобретения
Устройство для параллельного вождения мобильных агрегатов, содержащее источники направленного излучения, устройства для создания световых плоскостей, расположенных под острым углом друг к другу, следящую систему с приемниками излучения, установленными на мачте агрегата, о тличающееся тем, что, с
целью упрощения конструкции и повышения надежности устройства, мачта установлена на агрегате неподвижно, а приемники излучения выполнены в виде
фоточувствительной линейки и включены в систему слежения рулевого механизма агрегата через электронный коммутатор .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением мобильного агрегата | 1981 |
|
SU1077590A1 |
| Способ автоматического вождения самоходной машины и устройство для его осуществления | 1989 |
|
SU1748682A1 |
| Способ управления движением мобильного агрегата | 1983 |
|
SU1135439A2 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Система группового управления самоходными агрегатами | 1982 |
|
SU1061716A2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
Изобретение относится к сельскому хозяйству, в частности к групповому вождению самоходных сельскохозяйственных агрегатов или одного агрегата по параллельным траекториям. Цель изобретения - упрощение конструкции и повышение надежности устройства. При отклонении агрегата 9 от траектории движения меняется расстояние между фоточувствительными ячейками 6 и на выходе блока 7 вырабатывается пропорциональный этому изменению сигнал, который и воздействует на привод 8 рулевого механизма (или индицируется на приборной панели, сигнализируя водителю о необходимости корректировки по соответствующему направлению). I ил.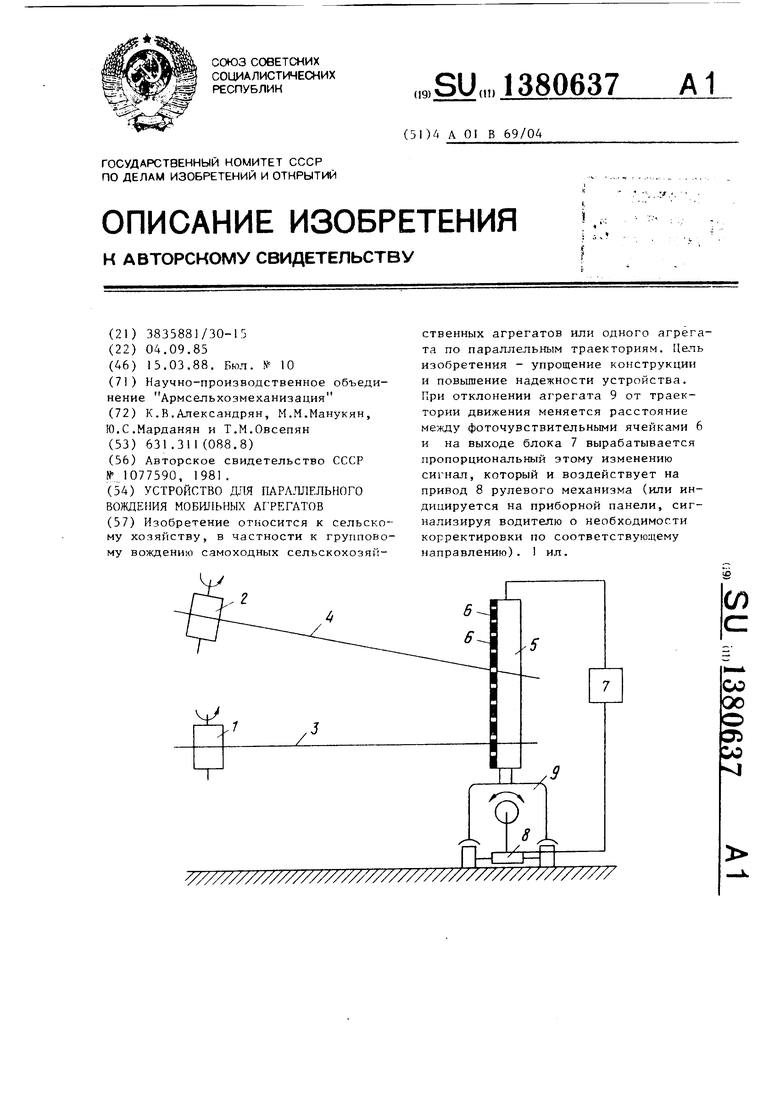
| Способ управления движением мобильного агрегата | 1981 |
|
SU1077590A1 |
