vj
Изобретение относится к машиностроению, а именно к манипуляторостроению и может быть использовано при механизации и автоматизации основных и вспомогательных процессов в промышленности.
Известна механическая рука, содержащая закрепленные на основании шарнирно соединенные звенья с индивидуальными приводами каждого звена, состоящими из приводных и натяжных тросовых кинематических цепей с механизмом натяжения и дифференциальным механизмом передачи движения звена 1.
Недостатком этого устройства являются большие размеры шкивов, что снижает грузоподъемность манипулятора.
Цель изобретения - повышение грузоподъемности.
Указанная цель достигается тем, что механическая рука, содержащая закрепленные на основании шарнирно соединенные звенья с индивидуальными приводами каждого звена, состоящими из приводных и натяжных тросовых кинематических цепей с механизмом натяжения и дифференциальным механизмом передачи движения звена, снабжена шатуном, шарнирно, в виде параллелограмма, связываюшим основание с приводом, шарнирно закрепленным на первом звене, индивидуальные приводы каждого из звеньев руки попарно связаны через водило и солнечное колесо дифференциального механизма, их приводные тросовые кинематические цепи попарно связаны червячным механизмом натяжения, выход индивидуального привода предыдущего звена связан с водилом дифференциального механизма, выход индивидуального привода последующего звена связан с одним солнечным колесом того же дифференциального механизма, натяжная кинематическая цепь последующего звена связана с вторым солнечным колесом того же дифференциального механизма, при этом частные передаточные отношения звеньев по всем кинематическим цепям равны между собой, а передаточные отношения приводной и натяжной цепей разнополярны.
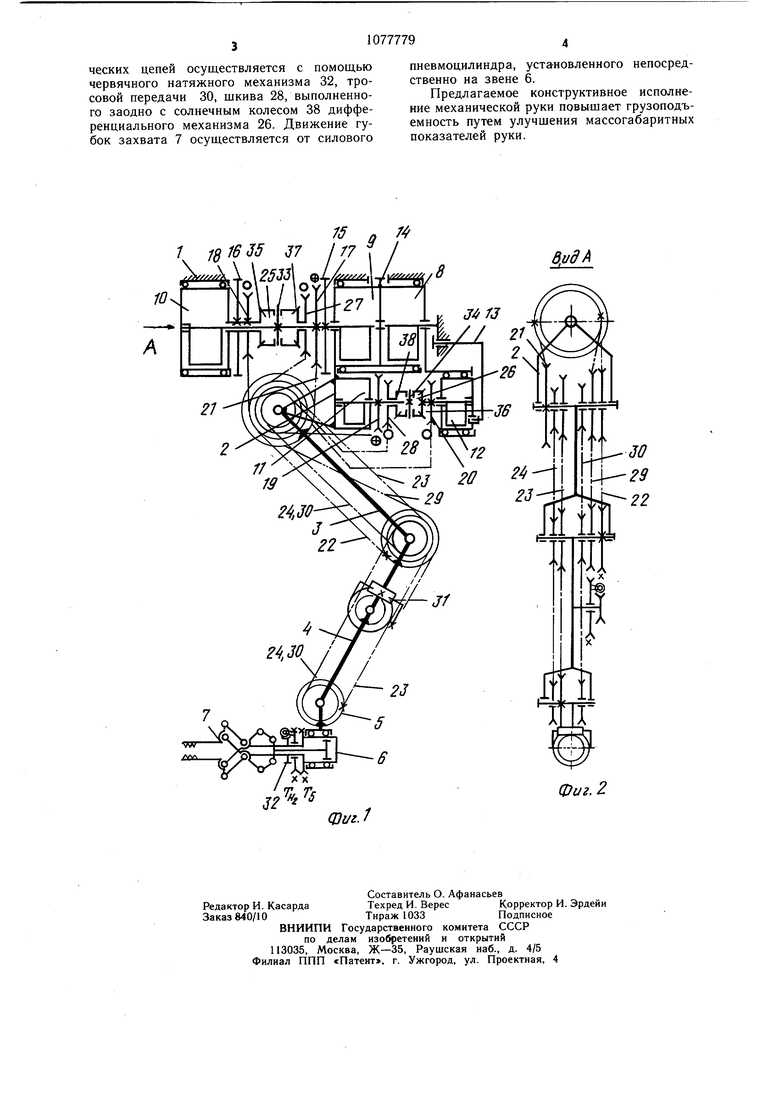
На фиг. 1 изображена кинематическая схема механической руки; на фиг. 2 - вид А на фиг. 1.
Механическая рука состоит из корпуса - основания 1, шарнирно соединенных, между собой звеньев 2-б и закрепленного с возможностью вращения на последнем из них захвата 7, установленных соосно в корпусе 1 индивидуальных приводов 8-10, звеньев 2-4 соответственно и приводов 11 и 12 звеньев 5 и 6 установленных на звене 2. Приводы 11 и 12 выполнены, например, в виде моментных пневмоцилиндров. Первая группа приводов 8-10 соединена между собой таким образом, что входной элемент последующего привода 8-10 закреплен выходным элементом предыдущего, причем ротор моментного пневмоцилиндра 8 закреплен на основании. Такая установка приводов 8-10 исключает кинематическое взаимовлияние движений звеньев 2-4 без применения дополнительного механизма компенсации.
Приводы 11 и 12 установлены на звене 2, первый - неподвижно, второй - с возможностью вращения, причем последний из них шарнирно, с помощью шатуна 13, сое0 динен с основанием 1 таким образом, что основание 1, корпус привода 12, шатун 13 и звено 2 образуют механизм шарнирного параллелограмма. Вид А показывает механизм параллелограмма, образованный основанием 1 и корпусом одного из приводов.
Такая установка приводов 11 и 12 обеспечивает независимость от качания механической руки относительно общей оси приводов 8-10 ориентации звена 6 с захватом относительно горизонта.
Q На выходных элементах приводов 8-10 закреплены зубчатые колеса - элементы 14-16, являющиеся входами к механизмам уравновешивания и построения стереотипных движений (не показаны).
Кинематические передачи движений
5 звеньям 3-6 содержат приводные (ведущие) шкивы - элементы 17-20, направляющие шкивы в шарнирах руки, тросы 21 - 24, ведомые шкивы, жестко соединенные со звеньями. Натяжные кинематические цепи обеих групп приводов 9 и 10, 11 и 12 со держат конические дифференциальные механизмы 25 и 26, шкивы 27 и 28, направляющие шкивы в шарнирах руки, тросы 29 и 30 и червячные натяжные механизмы 31 и 32, закрепленные на звеньях 4 и 6 соответственно. Водила 33 и 34 дифференциальных механизмов 25 и 26 жестко соединены с выходными элементами 15, 17, 19 приводов 9 и 11, одни солнечные колеса 35 и 36 - с выходными элементами 16, 18, 20 приводов 10 и 12, другие - 37 и 38 - со
0 шкивами 27 и 28 цепей натяжения.
Механическая рука работает следующим образом.
При подаче воздуха под рабочим давлением в полости моментных пневмоцилинд5 ров 8-12 происходит относительный поворот звеньев 2-6 соответственно. Движение звену 2 передается непосредственно с корпуса привода 8, на котором оно жестко закреплено; звену 3 - через шкив 17, тросовую передачу 21; звену 4 - через шкив 18, тросовую передачу 22. Натяжение этой пары кинематических цепей осуществляется с помогдью червячного натяжного механизма 31, тросовой передачи 29, шкива 27, выполненного заодно с солнечным колесом 37,
5 дифференциального механизма 25. Движение звену 5 передается через шкив 19, тросовую передачу 23; звену 6 - через шкив 20, трос 24. Натяжение этой группы кинематических цепей осуществляется с помощью червячного натяжного механизма 32, тросовой передачи 30, шкива 28, выполненного заодно с солнечным колесом 38 дифференциального механизма 26. Движение губок захвата 7 осуществляется от силового
пневмоцилиндра, установленного непосредственно на звене 6.
Предлагаемое конструктивное исполнение механической руки повышает грузоподъемность путем улучшения массогабаритных показателей руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1986 |
|
SU1323378A1 |
| Основный регулятор ткацкого станка | 1986 |
|
SU1342947A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Копирующий манипулятор | 1980 |
|
SU901045A1 |
| Устройство для погружения и извлечения сваи, шпунта | 1974 |
|
SU497379A1 |
МЕХАНИЧЕСКАЯ РУКА, содержащая закрепленные на основании шарнирно соединенные звенья с индивидуальными приводами каждого звена, состоящими из приводных и натяжных тросовых кинематических цепей с механизмом натяжения и дифференциальным механизмом передачи движения звена, отличающаяся тем, что. с целью повышения грузоподъемности, она снабжена шатуном, шарнирно, в виде параллелограмма, связывающим основание с приводом, шарнирно закрепленным на первом звене, индивидуальные приводы каждого из звеньев руки попарно связаны через водило и солнечное колесо дифференциального механизма, их приводные тросовые кинематические цепи попарно связаны червячным механизмом натяжения, выход индивидуального привода предыдущего звена связан с водилом дифференциального механизма, выход индивидуального привода последующего звена связан с одним солнечным колесом того же дифференциального механизма, натяжная кинематическая цепь последующего звена связана с вторым солнечi ным колесом того же дифференциального механизма, при этом частные передаточные (Л отношения звеньев по всем кинематическим цепям равны между собой, а передаточные отношения приводной и натяжной цепей разнополярны.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая рука | 1978 |
|
SU726762A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
