(54) МЕХАНИЧЕСКАЯ РУКА
726762
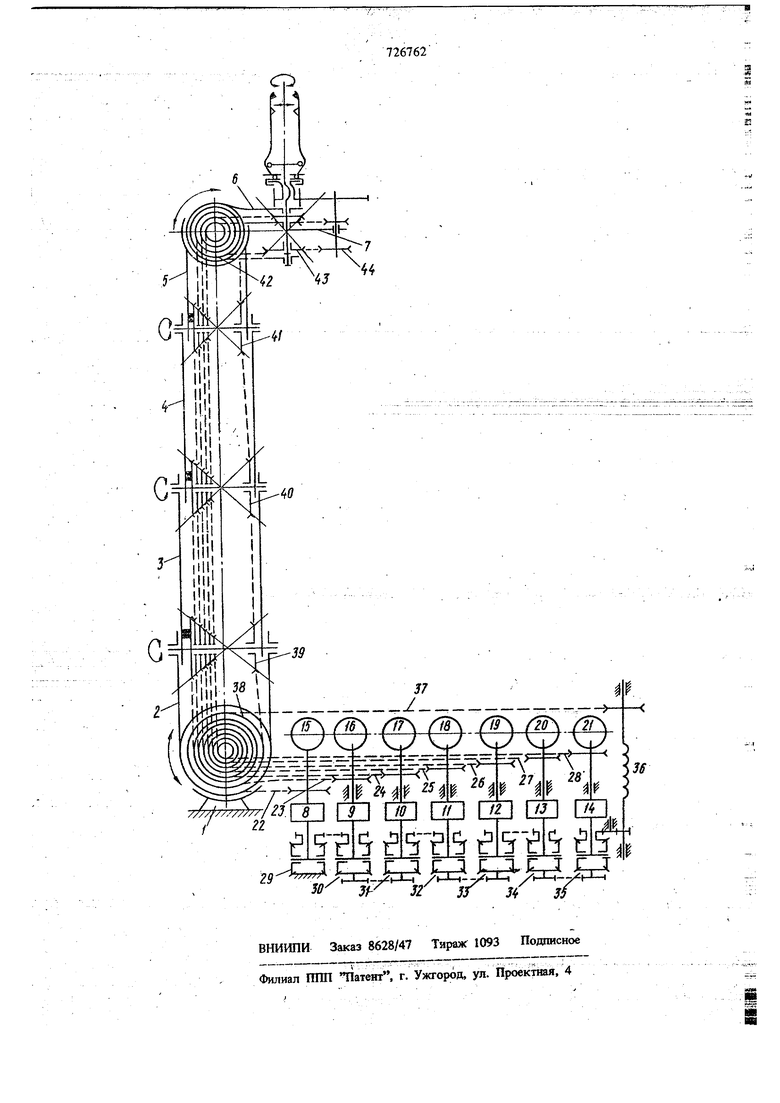
15-21, ITlBaHjjyrHx - к предыдущему и последующему дифференциалам ряда. Крайний дифференциал 35 ряда одаим из свободнШ входов свяШтор оно1«Г36 второй шец которого соединен с тросовой ветвью 37, про пущенной через установленные в щарнирах женьев 2-7 с ВОЭМб шббтШ вра1ЦёйШТр6лйкй 38-43, и укреплен на ведомол элементе звена 7 ролика 44. Другой крайний дифференциал 29 своим свобод1аш входном закреплен на ос-: . швании 1.-.™-., - -: Механическая рука работает следующим образом. ,.,, л, . ,.:.-; , - -При вращении приводов 15-21 движения перб№ тт-Щтт(&1 рЪсШт пкрер цам 28, которте осуществляют перемещения звень- ев 2-7. Кроме того, через согласующие редукторы 8- 4 движения передаются на сумматорььдифферешлиалы 29-35, суммирующие движения приводов и 6бесй1ЩШВДеврЙцегаге торсиона 36 без его раскрутки, поддерживая заданное торсионом натяжение тросовой ветви 37, которая через ролики 38-43 и ролик 44 обестечивает татяжение во всех кинематических
ШхГ ------- - -- - ----Ф о р м у л а и 3 о б р е т е и и я 1. Механическая рука, содержащая основание, щаркирно соединенные звенья, индивидуальные приводы каждого звена, приводные /цепи, механи.зм натяжения, содержащий натяжной элемент и кинематическую цепь, о т л ич а ю-щ а я с я тем, что, с целью упрощения конструкции, уменьщения веса и увеличения надежности, мех|шизм натяжения снабжен рядом сумматоров-дифференциалов, число которых равно числу натягиваемых приводных цепей, один вытсод каждого из сумматоров-дифферейдаалов подключен к индивидуальному приводу, двэ других - к предыдущему ипоследующему дифференциалам ряда, а два свободных входа крайних дифференциалов ряда соответственно к основагаю и к натяжному
элементу. -; :; : V
-. . ..., , .- . - I :
2. Рука по п. 1, отличающая с я теТм, что кинематическая цепь механизма натяже1тя 1вьшолнена в виде тросовой передачи, ,, элеш1п этого механизма - в виде торсиона.
Источники информации, принятые во внимание при экспертизе 1. Дистанционно управляемые роботы-манипуляторы. Сб, статей Под ред. Е. П. Попова, М., Мир, 1976, с. 184.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU699747A1 |
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1980 |
|
SU946917A1 |
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука с программным управлением | 1980 |
|
SU1000269A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
.i
- , .--,v - j,, .я«,.
,.,.,x,.. .-.iiu aiiat Sf aii&Siss::.Чякдав
to-cAd
SrJ-- irr r
;i,,;,-;,iii,qi:;i5,...-;:;y./:
.- iS-sr - -чй Si
y;«y l «gttbfe; a fH J j iv-«fl.-g.ia.
.--.-iJ-.. :-:..
