(54) МЕХАНИЧЕСКАЯ РУКА
Г
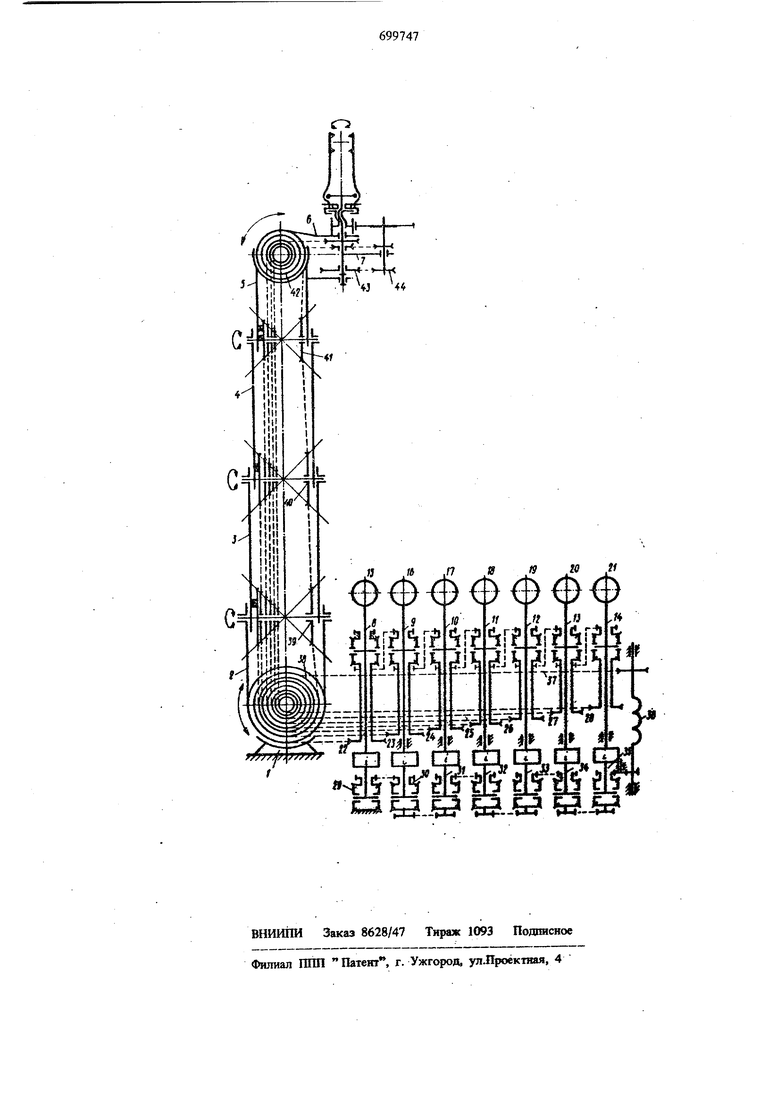
В НТВ pax, жестко закрепленных на звеньях l-l. Meханизм натяжения состоит из ряда связанных между собой дифференциалов 29-35 натяжного элемента в виде торсиона 36, тросовой ветви 37 пропущенной через установленные в шарнирах с возможностью вращения ролики 38-43 и укрепленной одним концом на ролике. 44 последнего звена 7. Второй конец тросовой ветви 37связан с торсионом 36, другой конец которого соединен с входом последнего дифференциала 35 механизма натяжения. При этом вход каждого из дифференциалов 29-35 этого механизма связан с входом соответствующего дифференциала 3-1 компенсации и с соответствующим И1цщвидуаг ьным приводом 15-21. Выход каждого из дифференциалов 8-14 механизма компенсации связан с приводным элементом одной из тросовых передач 22-28, причем один вход дифференциалов 8 и 29 механизмов компенсации и натяжения, расположенных первыми от основания 1, закреплен на основании. При вращении индивидуальных приводов 15-21 движения передаются на дифференциалы 8-14 механизма компенсации, а с него - тросовым передачам 22-28, которые перемещают звенья 2-7. Кроме того, вращение поступает на дифференциалы 29-35, которые суммируют движения индивидуал ных приводов и обеспечивают .вращение торсиона 36 без его раскрутки, поддерживая заданное торсионом натяжение тросовой ветви 37, ко торая через ролики 38-43 и ролик 44 обеспечивает натяжение шарнирно соединенных звеньев руки. Так как входы дифференциалов 8-14 механизма компенсации кинематически связаны с входами дифференциалов 29-35 механизма натяжения, то все дифференциалы 8-1.4 оказьтаются в контуре натяжения. Тем самым достига ется выборка зазора и натяжение всех дифференциалов и передач, установленных на основании. Механизм компенсации позволяет управлять индивидуальными приводами 15-21 без взаимо влияния других движений. Это достигается сзм мированием соответствз ощих движений с помощью дифференциалов 8-14. Например, если работает индивидуальный привод 15, передающи через тросовую передачу 22 движение звену 2, то в силу того, что тросы всех остальных тросовых передач 23-28 откатываются по своим направляющим роликам, звенья 3-7 также должны идти в движение (паразитное). Однако это не происходит, поскольку с индивидуального привода 15 движение передается и ira ряд последующих дифференциалов 9-14, которые через тросы передач 23-28 сообщают звеньям 3-7 движение на тот же угол в направлении, обратном паразитному. В результате при повороте индивидуального привода 15 повернется только звено 2, а относительные положения остальных звеньев 3-7 останутся при этом неизменными. Аналогично компенсируются при работе все другие индивидуальные приводы. Таким образом, механическая рука обеспечивает движение с семью степенями свободы при полном устранении зазоров в кинематических цепях и ПО.ПНОМ исключении кинематического взаимовлияния ийдивидуальпых приводов, что существенно расширяет ее функциональные возможности. Формула изобретения Механическая рука, содержащая основание, шарнирно соединенные звенья, индивидуальные приводы каждого звена, приводные цепи, механизм натяжения, содержащий натяжной элемент и дифференциалы, и механизм компенсации кинематического взаимовлияния перемещения звеньев, содержащий дифференциалы компенсации, отличающаяся тем, что, с целью расширения функциональных возможностей, дифференциалы компенсации связаны между собой последовательно и выход каждого из них связан с соответствующей приводной цепью, а вход - с индивидуальным приводом и входом соответствующего дифференциала механизма натяжения, последний представляет собой ряд последовательно соеданенных дифференциалов, причем свободный вход крайнего дифференциала компенсации и вход одного из крайних дафференциалов механизма натяжения закреплены на основании, а вход другого крайнего дифференциала механизма натяжения связан с натяжным элементом. Источники информации, принятые во внимание при экспертизе 1. Станки и инструменты, 1976, № 4, с. 4-6.
-i
да
ii;ii
f
ff Я
Л
,w ,r ,/ ,0
,s
TT 1т
ЛИЧИ ™ 
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1978 |
|
SU699746A1 |
| Механическая рука | 1978 |
|
SU708623A1 |
| Механическая рука | 1978 |
|
SU708624A1 |
| Механическая рука | 1978 |
|
SU726762A1 |
| Механическая рука | 1980 |
|
SU901044A1 |
| Механическая рука | 1978 |
|
SU828551A2 |
| Механическая рука | 1982 |
|
SU1077779A1 |
| Механическая рука | 1978 |
|
SU828550A1 |
| Механическая рука | 1980 |
|
SU998111A1 |
| Механическая рука | 1980 |
|
SU946917A1 |