Изобретение относится к измерительной технике, а именно к средствам контроля профиля зубьев зубчатых колес (эвольвентомерам). Известны устройства для контроля профиля зубьев зубчатых колес, соде жащие основание с тангенциальньми направляющими, подвижную по этим направляющим измерительную каретку с радиальными направляющими, ползу подвижный по радиальным направляющим, датчик малых перемещений, установленный на ползуне, управляемые приводы координатных перемещений измерительной каретки и ползуна с задающими входами, позиционные датчики измерительной каретки и пол зуна с цифровыми выходами и информационно-вычислительный блок с ячей ками памяти границ контролируемого профиля, входы которого соединены с датчиком малых перемещений и упомя нутыми позиционными датчиками.Извес ное устройство может работать в двух р жимах:ручного управления,когда перем щения измерительной каретки и ползуна выполняют нажатием соответствующих кнопок, и автоматическом 1прорраммном), при котором измерительно каретке и ползуну задают согласован ные перемещения по траектории, соот ветствующей профилю контролируемого зуба. Режим автоматического (программного) измерения начинается от точки F, соответствующей ножке зуба и заканчивается в точке К, соответствующей его головке. До начала измерений точки F и К должны быть най дены в ручном режиме, а соответству щие им координаты У запоминаются в ячейках памяти информационно вычиспительного блока Cl. Недостатком известного устройства является трудоемкость настройки поскольку точки F и К оператор должен найти в ручном режиме, манипулируя кнопками перемещений по осям X и У, Цель изобретения - упрощение настройки прибора. Поставленная цель достигается тем, что устройство для,контроля профиля зубьев зубчатых колес, содержащее основание с тангенциальными направляющими, подвижную по этим направляющим измерительную каретку с радиальными направляющими, ползун, подвижный по радиальным направляющим, датчик малых перемещений, установленный на ползуне, управляемые приводы координатных перемещений измерительной каретки и ползуна с задающими входами, позиционные датчики измерительной каретки и ползуна с цифровыми выходами, а также информационно-вычислительный блок с ячейками памяти границ контролируемого участка профиля входы которого соединены с датчиком малых перемещений и позиционными датчиками, снабжено внешним по отношению к информационно-вычислительному бЛоку переключателемj соединяющим задающий вход привода координатных перемещений измерительной каретки либо с выходом датчика малых перемещений, либо с информационно-вычислительным блоком. Устройство для измерения профиля зубьев зубчатых колес схематически изображено на чертеже. Оно содержит основание 1, с тангенциально расположенными направляющими 2 (координата х), подвижную по направляющим измерительную каретку , 3 с радиальными направляющими 4 ( координата У), подвижным по этим направляю24им ползун 5 с датчиком б малых перемещений, на измерительном рычаге 7 которого смонтирован измерительный наконечник 8, взаимодействующий с контролируемым профилем. Измерительная каретка и ползун снабжены управляемытли приводами 9 и 10 координатных перемещений и позиционными датчиками 11 и 12 . Каждый из позиционных датчиков снабжен цифровыми блоками 13 и 14 и позиционными регуляторами 15 и 16. Для управления устройством служит информационно-вычислительный блок, состоящий из центрального процессора 17, пульта 18 управления и блока 19 памяти. В составе (последнего блока имеются ячейки 20 и 21 памяти, предназначенные для хранения значений координат границ рабочего участка профиля. На пульте управления находятся кнопки 22 - 25 ручного управления перемещениялш каретки, кнопки 26 и 27 переключения направления измерительного усилия, кнопка 28 стирания ячеек памяти, кнопка 29 включения режима настройки, кнопки 30 и 31 записи информации и кнопка 32 окончания автоматического цикла. Входы центрального процессора соединены с выходами цифровых блоков позиционных датчиков и датчика малых перемещений. Устройство содержит также внешний переключатель 33,позволяю щий соединять позиционный регулятор привода координатных перемещений измерительной каретки, либо с информационно вычислительным блоком, либо с датчиком малых перемещений, минуя информационно-вычислительный блок. Управляющие выходы процессора соединены с датчиком малых перемещений и с упомятуным переключателем. Устройство работает следующим образом. При первоначальном включении устройство работает в одном режиме с информационно-вычислительным бло-ком, а направление измерительного усилия устанавливается так, как это Необходимо для контроля правого профиля. Ячейки 20 и 21 памяти обнуляются, а сигнальные лампочки при кнопках 30 и 31 записи информации переключаются в мигающий режим. Перед началом измерения оператор должен выполнить настройку прибора на границы рабочего участка эвольвентного профиля. Для этого он переводит устройство в режим настройки нажатием кнопки 29. ЕСЛИ оператор предпочитает выполнить настройку по новому профилю, то он должен предварительно переключить на этот профиль измерительное усилие нажатием кнопки 27, После нажатия кнопки 29 внешний переключатель 33 соединит позиционный регулятор 15 привода координатных перемещений измерительной каретки непосредственно с датчиком малых перемещений, и устройство перейдет в следящий режим. Привод измерительной каретки будет перемещать последнюю до тех пор, пока измерительный наконечник 8 не придет во взаимодействие с контролируемым профилем (в рассматриваемом случае правым), после чего кнопки ручного управления по оси X (кнопки 22 и 23) будут заблокированы .
Манипулируя кнопками управления еремещением по оси У (кнопки 24 25) оператор может переместить змерительный наконечник к головке, ибо ножке зуба. Движение по оси X этом случае будет выполняться авоматически датчиком малых перемещеНИИ. Найдя точку F (границу ножки зуба), оператор должет нажать кнопку 30, чем вызовет занесение текущей координаты ползуна в ячейку 20 памяти, а после нахождения точки К границы головки зуба - кнопку 31, чем вызовет заполнение ячейки 21 памяти. На случай ошибочных действий оператора программой настройки предусмотрен контроль значений кнопок 30 и-.31. Вторая из упомятуных величин должна быть большей. Если это условие не выполняется. то информация в ячейках памяти стирается и настройку следует выполнить снова. Если же ячейки заполнены правильно, то устройство переходит в автоматический режим. Нажатием одной из кнопок 24 или 25 (+У или -У) вызывают согласованное движение приводом измерительной каретки и ползуна в соответствии с программой, определяющей профиль контролируемого зуба. Отклонения действительного профиля от номинального отмечает датчик б малых перемещений и передает в информационно-вычислительный блок для регистрации. При автоматическом программном ) контроле движение по координате У ограничено значениями кнопок 30 и 31, хранящимся в ячейках 20 и 21 памяти однако оператор длительным нажатием кнопок 24 и 25 может вывести измерительный наконечник и за границы этого участка (например, при перходе к контролю) профиля следующего зуба)7
Нс1жатие кнопки 32 (О) выводит усройство из автоматического цикла.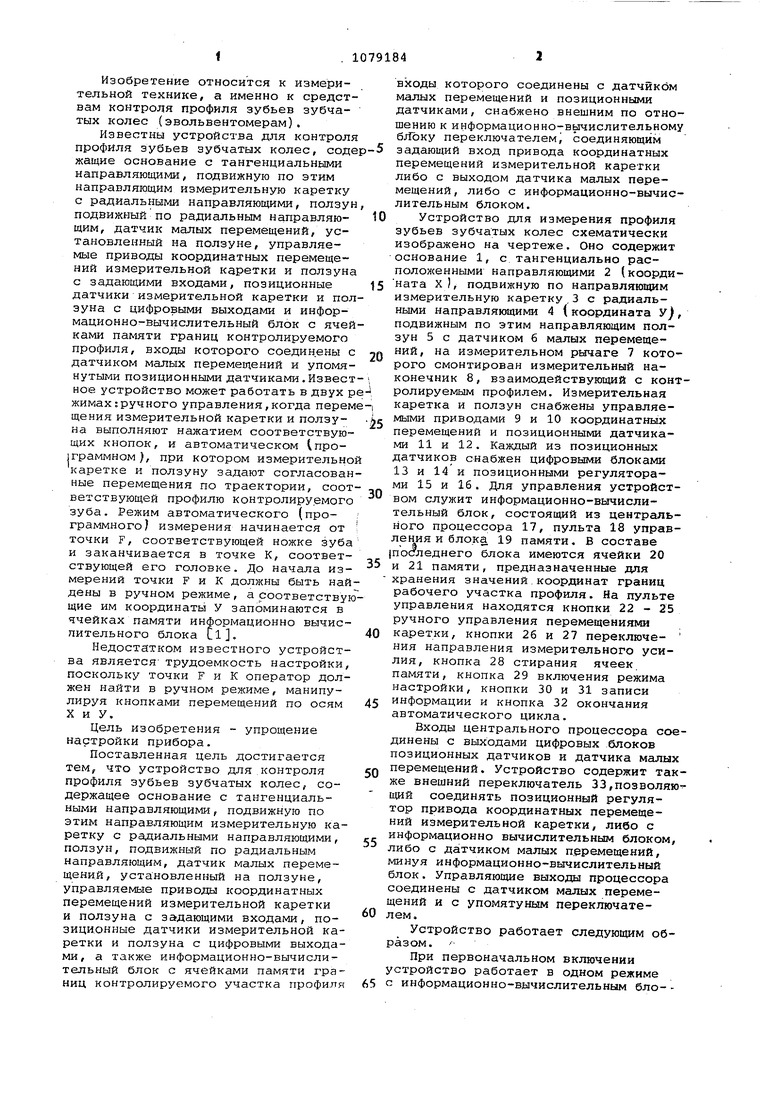
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОФИЛЯ ЗУБЬЕВ ЗУБЧАТЫХ КОЛЕС, содержгицее основание с тангенциальными направляющими, подвижную по этим направляющим измерительную каретку с радиальными направляющими, ползун, подвижный по радиальным направляющим, датчик малых перемещений, установленный на ползуне, управляемые приводы координатных перемещений измерительной каретки и ползуна с задающими входами, позиционные датчики измерительной каретки и ползуна ,с цифровыми выходами, а также информационно-вычислительный блок с ячейкаьм памяти границ контролируемого профиля, входы которого соединены с датчиком малых перемещений и позициоТГными датчиками, отличающееся тем, что, с целью упрощения настройки, оно снабжено внешним по отношению к информационно-вычислительноьту блоку переключателем, соединяющим задающий вход привода координатных % перемещений измерительной каретки сл с либо с выходом датчика малых перемещений, либо с информационно-вычислительным блоком. ИЗОБРЕТЕНИЙ « .29 со -27 00 4 -26 J2 .28 23 -24 -22