4. Устройство по п. 1, отличающееся тем, что оно снаб.жено управляющим тактовым генерато.ром, выход которого соединен с вторым: входом регулятора хода регулируюэдего контура осевого привода, преобразователем углового перемещения
-В линейное, (роединенным с выходом осевого позиционного датчика, вычислителем положения поворотного стола, соединенным с выходом осевого позиционного датчика, переключателем, связанным входом с одним из выходов вычислителя положения поворотного стола, а выходом - с вторым входом регулятора хрда регулирующего контура привода вращения ,


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поэлементного контроля зубчатых колес | 1980 |
|
SU1242705A1 |
| Способ контроля профиля зуба зубчатых колес и устройство для его осуществления | 1980 |
|
SU1145938A3 |
| Устройство для контроля профиля зубьев зубчатых колес | 1980 |
|
SU1079184A3 |
| Устройство для поверхностного пластического упрочнения зубьев цилиндрических колес с тангенциальной подачей заготовки | 1986 |
|
SU1433607A1 |
| Устройство для контроля погрешностей зубчатых колес | 1990 |
|
SU1737254A1 |
| РЕГУЛЯТОР СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2106681C1 |
| СЕРВОПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ, ПРИВОДИМЫЙ В ДЕЙСТВИЕ ТЕКУЧЕЙ СРЕДОЙ | 2011 |
|
RU2548837C2 |
| Приспособление для контроля конических колес | 1989 |
|
SU1732138A1 |
| Кромкогибочная установка | 1990 |
|
SU1784339A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |

УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЗУБЧАТЫХ КОЛЕС., содержащее станину, установленные на ней радиальный ползун с кинематически связанным с ним радиальным позиционным датчиком, установленным на радиальном ползуне, радиальный привод, кинематически связанный с радиальным ползуном, тангенциальный ползун с кинематически связанным с ним тангенциальным позиционным датчиком, установленный на .тангенциальном ползуне осевой ползун с кинематически связанным с ним осевым позиционным датчиком и с датчиком линейных перемещений, расположенный на радиальном ползуне поворотный стол для установки зубчатых колес с кинематически связанным с ним поворотным позиционным датчиком, привод вращения, кинематически свяэанный с поворотным столом, тангенциальный привод, кинематически связанный с тангенциальным ползуном, осевой привод, кинематически связанный с осевым ползуном, три регули- рующих контура, каждый из которых состоит из тахогенератора, кинематически связанного с ним серводвигателя, кинематически связанного с соответствующим побиционным датчиком, электронный блок управления и-обработки данных, входы которого электрически соединены с выходами позиционных датчиков, регулирующих контуров и датчика линейных перемещений, отлич ающееся тем, что, с целью повышения точности контроля, каждый регулирующий контур снабжен регулятором хода, подключенным к его выходу регулятором скорости, вход серводвигателя соединен с выходом регулятора скорости, выход одного из позиционных датчиков соединен с одним из входов регулятора хода, а выход тахогенератора подключен к второму входу регулятора скорости 2. Устройство по п. 1, отли(У) чающееся тем, что оно снабжено управляющим тактовым генератором, выход которого соединен с вторым входом регулятора хода регулирующего контура привода вращения, преобразователем углового перемещения в линейное, соединенным с выходом поворотного позиционного датчика, вычислителем положения танО) генциального ползуна, вход которого соединен с выходом преобразоватедя углового перемещения в линейное, переключателем, связанным выходом о с одним из входов вычислителя положения тангенциального ползуна, а выходом - с вторым входом регулятора хода регулирующего контура тангенциального привода. 3. Устройство по пп. 1 и 2, отличающееся тем, что оно снабжено вычислителем положения осевого ползуна,, вход которого связан с выходом поворотного, позиционного датчика и переключателем, связанным входом с одним из выходов . вычислителя положения осевого ползуна, а вЫжодом - с вторым входом регулятора хода регулирующего контура осевого привода.
Изобретение относится к машиностроению, а именно к средствам контроля зубчатых колес.
Известно устройство для контроля параметров зубчатых колес, содержащеё станину, установленные на ней радиальный и осевой ползуны, каждый из которых снабжен приводом и по- . зиционным датчиком, поворотный стол датчик линейных перемещений, блок управления и обработки данных. При контроле, например, профиля зуба движение, обкатки осуществляется посредством двух перемещений: вращательного - стола и поступательного тангенциального ползуна. Электронный |блок управления и обработки данных непрерывно сравнивает данные, посланпые позиционными датчиками, стеоретическим угловым положением гцоворотного стола или тангенциального ползуна и вызывает коррекцию сигнала, посланного датчиком линейных перемещений 1Л.
Недостатком данного устройства является сложность электронного блока управления и обработки данных, что снижает точность и стабильность контроля.
Наиболее близким.к изобретению по технической Сущности является устройство для контроля параметров зубчатых колес, содержащее станину, установленные на ней радиальный ползун с кинематически связанным с ним радиальным позиционным датчиком установленным на радиальном ползуне радиальный привод, кинематически связанный с радиальным ползуном, тангенциальный ползун с кинематически связанным с ним тангенциальным позиционным датчиком, установленный на тангенциальном ползуне осевой ползун с кинематически связанным с ним осевым позиционным датчиком и с датчиком линейных перемещений, расположенный на радиальном ползуне поворотный стол для установки зубчатых колес с кинематически связанным с ним поворотным позиционным
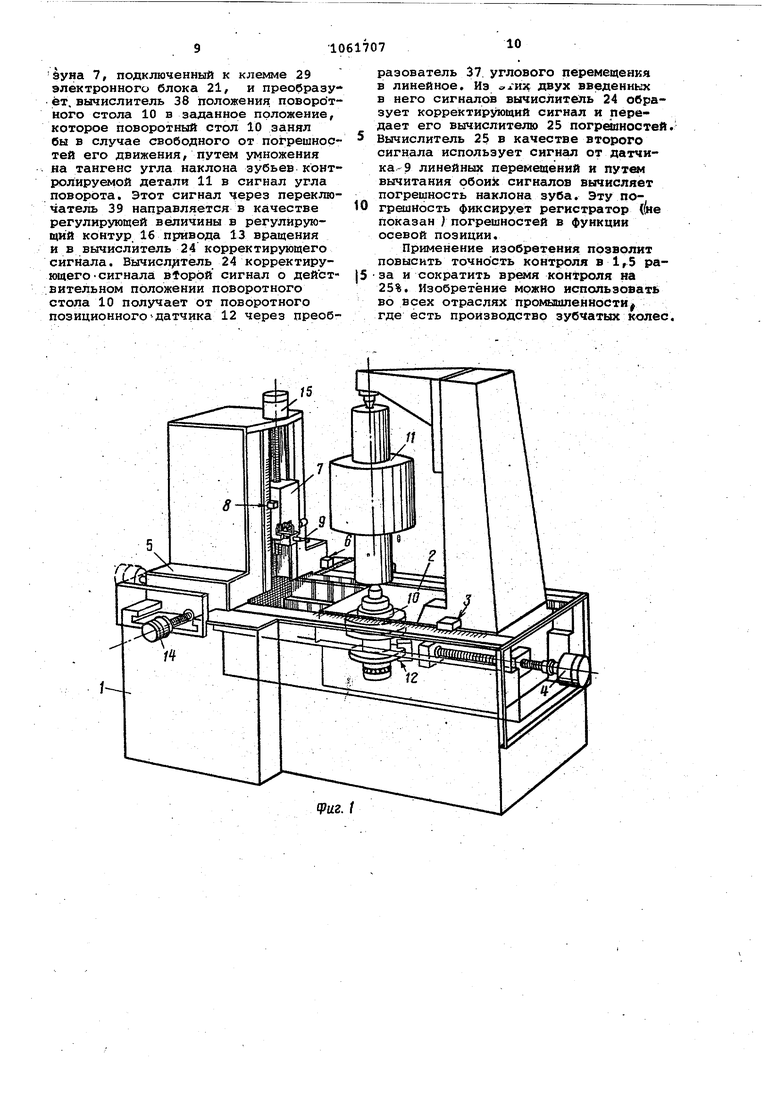
датчиком, привод вращения, кййематически связанный с поворотньм столом тангенциальный привод, кинематическ связанный с тангенциальный ползуном осевой привод, кинематически связанный с осевым ползуном, три регулирующих контура, кажгщй из которых состоит из тахогенератора, кинематически связанного с ним серводвигателя, кинематически связанного с соответствующим позиционным датчиком, электронный блок управяеВйя и обработки данных, входы которого электрически соединены с выходами позиционных датчиков, регуяиру Вд1ИХ контуров и датчика линейных .иерёме щений. Для измерения, например, профилА зуба в память электронного блока управления и обработки. Данных вводится желаемый профиль эвольвентно контролируемого зубчатого колеса, где он переводится в теоретический путь, вдоль которого долже перемещаться датчик линейных перемещений, чтобы соблюдать заданное расстояние между собой и измеряемой в данный момент боковой поверхность зуба при работающих приводе вращения и тангенциальном приводе. Электронный блок управления и обработки данных генерирует сигналы, необходимые для осуществления соответствующим образом скоординированного вращательного движения зубчатого колеса вокруг своей оси и тангенциального перемещения датчика линейных перемещений с ощупью ающим наконечником. Одновременно электронный блок управления и обработки данных использует электрические сигналы, поступающие от датчика линейных перемещений и задающие положение его ощупывающего наконечника относи тельно контролируемой боковой поверхности зуба в виде отклонения от заданного профиля. При этом посЛанные позициоиньот датчике привода вращения и тангенциального привода |;игналы непрерывно сравниваются электронным блоком управления и обработки данных с теоретическим угловым положением контролируемого .зубчатого колеса или с теоретически положением несущего датчик линейных перемещений тангенциального ползуна Каждре отклонение фактического по,. ложения от теоретического вызывает коррекцию посланных датчиком линей,ного перемещения сигналов. В резуль тате фиксируются сигналы, которые в некоторой степени свободны от погрешностей перемещения ползунов устройства C2J. Недостатком этого технического решения является наличие сложного запоминающего и вычислительного устройства для накапливания данных и приведения их во взаимное соответствие. Особенно снижается -точнос контроля, если вместо обработки данных после завершения операции контроля необходимо осуществить использование их во время самого процесса контроля. Цель изобретения - повышение точности контроля. Поставленная цель достигается тем, что в устройстве для контроля параметров зубчатых колес, содержащем станину, установленные на ней радиальный ползун с кинематичёс ки связанным с ним радиальным позиционным датчиком, установленным на радиальном ползуне, радиальный привоя, кинематически связанный с радис1льньф| пЬлзунс, тангенциальный ползун с кинематически связанным с ним тангенциальным позиционным датчиком, установленный на тангенциальном ползуне осевой ползун с кинематически связанным с ним осевым позиционным датчиком и с датчиком линейных перемещений, расположенный на радиальном ползуне повороггный стЬл для установки зубчатых колес с кинематически связанным Сним поворотным позиционным датчиком привод вращения, кинематически связанный с поворотным столом, тангенциальный привод, кинематически связанный с тангенциальным ползуном, осевой привод, кинематически свяэ& , ный с осевым ползуном, три регулирующих контура, каждый из которых состоит из тахогенератора, кинематически связанного с ним серводвигателя, кинематически связанного, с соответствующим позиционным датчико электронный блок управления и ойргг ботки данных, входы которого электрически соединены с выходами позиционных датчиков г регулн руимцих кон ров и датчика линейных перем ейий каждый регулирующий контур снабжён регулятором хода, подключенньш к ег выходу регулятором скорости, вход серводвигателя соединен с выходом регулятора скорости, выход одного из позиционных датчиков соединен с одним из входов регулятора хода, а выход тахогенератора подкозючен к второму входу регулятора скорости. При этом устройство снабжено управляющим тактовым генератором, выход которого соединен с вторым входом регулятора хода регулирующего контура пр1шода вращения, преобразо вателем углового перемещения в линейное, соединенным с выходом поворотного прзиционного датчика, вычислителем положения та нгенциального ползуна, вход которого соединен с выходом преобразователя углового перемещения в линейное, Ьереключателем, связанным выходом с одним из входов вычислителя положения тангенциального ползуна, а выходом - с вторым входом регулятора хода регулирующего контура тангенциального привода. ,, . Кроме тогол устройство снабжено вычислителем положения осевого ползуна, вход которого связан с выходом поворотного позиционного датчика и переключателем, связанным вхо.дом с одним из выходов вычислителя положения осевого ползуна, а выходом - с вторым входом регулятора хода регулирующего контура осевого привода. Устройство снабжено также управляющим тактовым генератором, выход которого соединен -с вторым входом регулятора хода регулирующего контура осевого привода, преобразобателем углового перемещения в линейное, соединенным с выходом осевого позиционного датчика, вычислителем положения поворотного стола, соединенным с выходом осевого Лпозиционного датчика, переключателем, связанным входом с одним из выходов вычислителя положения поворотного стола, а выходом - с вторым входом, регулятора ходарегулирующего контура привода вращения На фиг. 1 показано устройство для контроля параметров зубчатых колес, общий вид/ на.фиг. 2 -блоксхема устройства для контроля профиля зуба; на фиг. 3 - блок-схема устройства для контроля профиля зуба шага зубчатых шнекоб; на фиг. 4 блок-схема устройства для контроля узлов .наклона зубьев/ на фиг. 5 блок-схема регулирующего контура. Устройство содержит старину 1, установленные на ней (фиг. 17 радиаль-ный ползун 2 с кинематически связанным с ним радиальным позиционным датчиком 3, установленным на радиальном ползуне 2, радиальный при вод 4, кинематически связанный с pa диальньм ползуном 2, тангенциальный ползун 5 с кинематически связанны . с ним тангенциальным позиционным
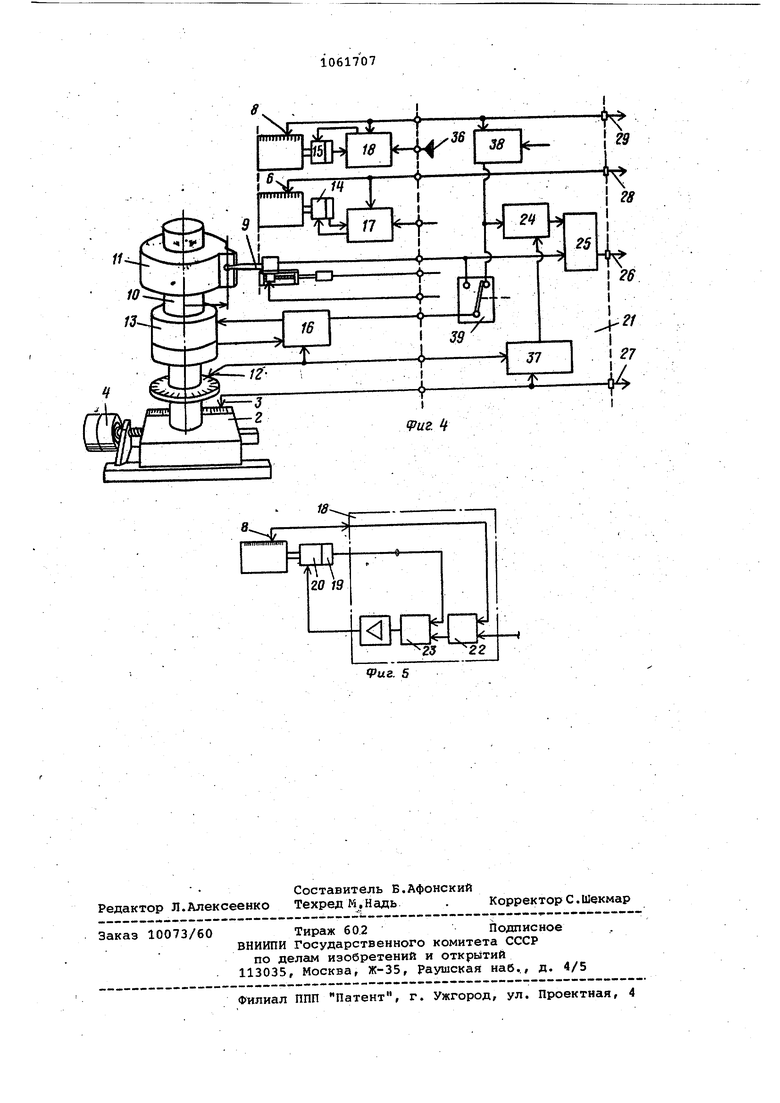
датчиком б, установленный на тангенциальном ползуне 5 осевой ползун 7 с кинематически связанным с ним осевым позиционным датчиком 8 и с датчиком 9 11инейных перемещений, расположенный на радиальном ползуне 2 поворотный стол 10 для установки контролируемой детали 11 с кинематически связанным с ним поворотным позиционным датчиком 12, привод 13 вращения, кинематически связанный с поворотным столом 10, тангенциальный привод 14, кинематически связанный с тангенциальным ползуном 5, осевой привод 15, кинематически связанный с осевым ползуном 7, три регулирующих контура; регулирующий .контур 16 привода 13 вращения, регулирующий контур 17 тангенциального привода 14 и регулирующий контур 18 осевого привода 15, каждый из которых состоит (фиг. 5} из тахогенератора 19, кинематически связанного с ним серводвигателя 20, кинематически связанного с соответствующим датчиком, например -осевым позиционным датчиком 8, электронный блок 21 управления и обработки данных, входы которого электрически соединены с выходами позиционных датчиков 6, 8 и 12, регулирующих контуров 16, 17 и 18 и датчика 9 линейных перемещений. Каждый регулирующий контур 16, 17 и 18, кроме того, снабжен (фиг. 5) регулятором 22 хода, подключенным к его выходу регулятором 23 скорости, вход серводвигателя 20 соединен с. выходом регулятора 23 .скорости, выход позиционного датчика например, датчика 8, соединен с од-: ним из входов регулятора 22 хода, а выход тахогенератора 19 подключен к второму входу регулятора 23 скорости.
Электронный блок 21 управления и обработки данных содержит соединенны последовательно вычислитель 24 корретирующего сигнала и вычислитель 25 погрешности и имеет выводную клемму 26 для подключения регистратора, а также выходные 27, 28 и 29 для подключения указателей положения соответствующих позиционных датчиков.
При- этом устройство снабжено управляющим тактовым генератором
30(фиг. 2, 3 и 4J), выход которого соединен с вторым входом регулятора 22 хода регулирующего контура 16 привода 13 вращения, преобразователем 31 углового перемещения в пкнейное, .соединенным с выходом пово:рртного позиционного датчика 12, вычислителем 32 положения тангенциального ползуна 5, вход которого соединен с выходом преобразователя
31углового перемещения в линейное, переключателем 33, связанным внходом с одним из входов вычислителя 24 корректирующего сигнала, а выходом - с вторым входом регулятора 22 хода регулирующего контура 17 тангенциального привода 14.
Кроме того, устройство снабжено вычислителем 34 положения осевого ползуна 7, вход которого .связан с выходом поворотного позиционного датчика 12, и переключателем 35, связанным входом с одним из выходов вычислителя 34 положения осевого ползуна 7, а выходом - с вторым вхЬдом регулятора 22 хода регулирующег контура 18 осевого привода 15.
Устройство снабжено также управлющим тактовым генератором 36, выход которого соединен с вторым входом регулятора 22 хода регулирующего контура 18 осевого привода 15, преобразователем 37 углового перемещения в линейное, соединенным с выходом осевого позиционного датчика 8, вычислителем 38 положения поворотного, стола 10, соединенньа с выходом осевого позиционного датчика 8, переключателем 39, связанным входом с одним из выходов вычислителя 38 положения поворотного стола 10, а выходом - с вторым входом регулятора 22 хода регулирующего к®нтура 16 привода 13 вращения.
Устройство работает следующим образом.
При контроле, например, профиля контролируемой детали 11 радиальный ползун 2 (фиг. 1) посредством радиального привода 4 перемещают в положение, в котором датчик 9 линейных перемещений контактирует с зубом на радиусе основной окружности контролируемой детали 11 (.зубчатого колеса). Это положение радиального ползуна 2 контролируется посредством радиального позиционного датчика 3 и подключенного к выходной клемме 27 указателя положения (не показан / радиального ползуна 2.
Затем осуществляется обкат контролируемой детали 11 {зубчатого колеса ) и датчика 9 линейных пере- мещений, причем зубчатое колесо выполня:ет вращательную составляющую обкатывающего-движения, совершая повороты с поворотным столом 10 вокруг своей оси, в то. время как датчик 9 линейных перемещений выполняет линейную составляющую обкатывающего движения за счет перемещения тангенциального ползуна 5.
Поворотный стол может быть неподвижно закреплен на станийе 1. В этом случае необходимо, чтобы посредством перемещения тангенциального ползуна 5 устанавливался контакт датчика 9 линейных перемещений с зубом контролируемого колеса на радиусе основной окружности, например, за счет расположения тангенциального ползуна 5. на радиальном ползуне-. Тогда этот радиальный ползун должен быть оснащен.радиальным приводоМ| радиальным позиционным датчиком и другими элементами,: Каждый из регулирующих контуров 16, 17 и 18 независимо от того, обслуживает ли он привод 13 враиени поворотного стола, тангенциальный ГЕривод 14 или осевой привод ,15 (фиг. 2, 3 и 4), имеет одинаковую принципиальную конструкцию, показан ную на фиг. 5. Серводвигатель 20 по лучает сигналы, например, от регулирующего контура 18 осевого при-, вода 15 и кинематически связан с . тахогенератором 19, посылающим сигн лы к регулятору 23 скорости, расположенному, например, внутри регулирукщего контура 18 осевого привода 15. Соответствующий датчик напр мер осевой позиционный датчик 8, соединён с вторым входом регулятора 22 хода, расположенного, наприме внутри регулирующего контура 18 осевого привода 15. Таким образом, каждый регулирующий контур 16,- 17 и 18 является сос тавной частью двух регулирующих контуров, а именно контура позиционного регулирования, на который в качестве регулирующей в.елйчины поступает величина заданного положения того из приводов, который не зависит от соответствующего позиционного контура позиционного регулирования. Для контроля профиля зуба контролируемой детали 11 тактовый генератор 30 (фиг. 2 ) управляет поворот ным столом 10, так что он выполняет ведущую функцию. Регулирующим конту -ром 16 привода 13 вращения устанавливается угловое положение поворотн го стола 10 относительно определенного нулевого положения. Вычислитель 32 положения тангенциального ползуна преобразует его путем умнож ния на установленный радиус основно окружности в за;с1аннре положение, ко торое должен был. бы занять тангенциальный ползун 5, если бы имело ме то свободное от погрешностей движение обкАтки. Посланный вычислителем 32 положения тангенциального.ползуна 5 сиг нал вводится через переключатель 35 в качестве регулирующей величины в регулирующий контур 17 тангенциального привода и в вычислитель 24 корректирующего сигнала, Вычислитель 24 корректирующего сигнала получает, кроме того, соответствующий действительному положению танге циального ползуна 5 сигнал от тангенциаНьного позиционного датчика 6 и образует путем вычитания обоих введенных в него сигналов корректирующий сигнал. Вычислитель 25 погрешностей, кроме корректирующего сигнала, получает также сигнал от датчика 9 линейных перемещений, .соответствующий его отклонению. Так как это отклонение зависит от погрешности Движения обкатки и от погрешности профиля зуба в контролируемой точке, вычислитель 25 погрешностей вычитает один введенный в него сигнал из другого для. получения истинной погрешности профиля. Эту погрешность фиксирует регистратор (не показан ), подключенный к клемме 26 вычислителя 25 погрешностей, именно в зависимости от фактического положения тангенциального ползуна 5, фиксируемого указателем (не показан / положения тангенциального ползуна, подключенного к клемме 28 электронного блока 21. В это же время остающееся неизменным при контроле профиля зуба положение осевого ползуна 7 фиксируется указателем (не показан:)положения осевого ползуна, подключенным к клемме 29 электронного блока 21. Если контролируемая деталь 11 представляет собой зубчатый шнек, у которого нужно проконтролировать погрешность шага, то поворотным столом 10 управляет тактовый генератор 30. Сигнал с поворотного позиционного датчика-12 преобразует в заданное положение осевого ползуна 7 (фиг. 3 ) вычислитель 34 положения осевого ползуна путем умножения на заданные параметры, характеризующие шаг.. Сигнал вычислителя 34 положения осевого ползуна 7 вводится через пёреключатель 33 в виде регулирующей величины в осевой регулирующий контур 18 осевого привода 15 и в вычислитель 24 корректирующего сигнала. Вычислитель 24 корректирующего сигнала получает, кроме того, соответствующий действительному положению осевого ползуна 7 сигнал от осевого позиционного датчика 8 и путем вычитания введенных в него сигналов образует корректирующий сигнал, направляемый в вычислитель 25 погрешностей. Вычислитель 25 погрешностей получает, кроме того, сигнал от датчика 9 линейных перемещений и определяет путем вычитания обоих сигналов погрешность шага, которую фиксирует регистратор (не показан }, подключенный к клемме 26. При контроле угла наклона зубьев тактовый генератор 36 управляет движением осевого ползуна 7 и, таким образом, он принимает на себя ведущую функцию. Сигналы осевого позиционного датчика 8 фиксирует указатель (не показан ) положения осевого полауна 7, подключенный к клемме 29 электронного блока 21, и преобразу ет, вычислитель 38 положения поворотного стола 10 в заданное положение, которое поворотный стол 10 занял бы в случае свободного от погрешнос тей его движения/ путем умножения на тангенс угла наклона зубьев конт ротируемой детали 11 в сигнал угла поворота. Этот сигнал через переключатель 39 направляется в качестве регулирующей величины в регулирующий контур 16 привода 13 вращения и в вычислитель 24 корректирующего сигнала. Вычисл итель 24 корректирующего сигнала в1оррй сигнал о действительном положении поворотного стола 10 получает от поворотного позиционного--датчика 12 через преобразователь 37. углового перемещения в линейное. Из кх двух введенных в него сигналов вычислитель 24 образует корректирующий сигнал и передает его вычислителю 25 погрешностей Вычислитель 25 в качестве второго сигнала использует сигнал от датчика -9 линейных перемещений и путем вычитания обоих сигналов вычисляет погрешность наклона зуба. Эту погроиность фиксирует регистратор (/ле показан погрешностей в функции осевой позиции.
Применение изобретения позволит повысить точность контроля в 1,5 ра за и сократить время контроля на 25%. Изобретение можно использовать во всех отраслях промышленности где есть производство зубчатых колес
в
11
21
(put 2
. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США №3741659, | |||
| кл | |||
| Г, 01 В 9/02, 1973. | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Г | |||
| Спрингфилд, Виндзор, штат Вермонт (прототип). | |||
