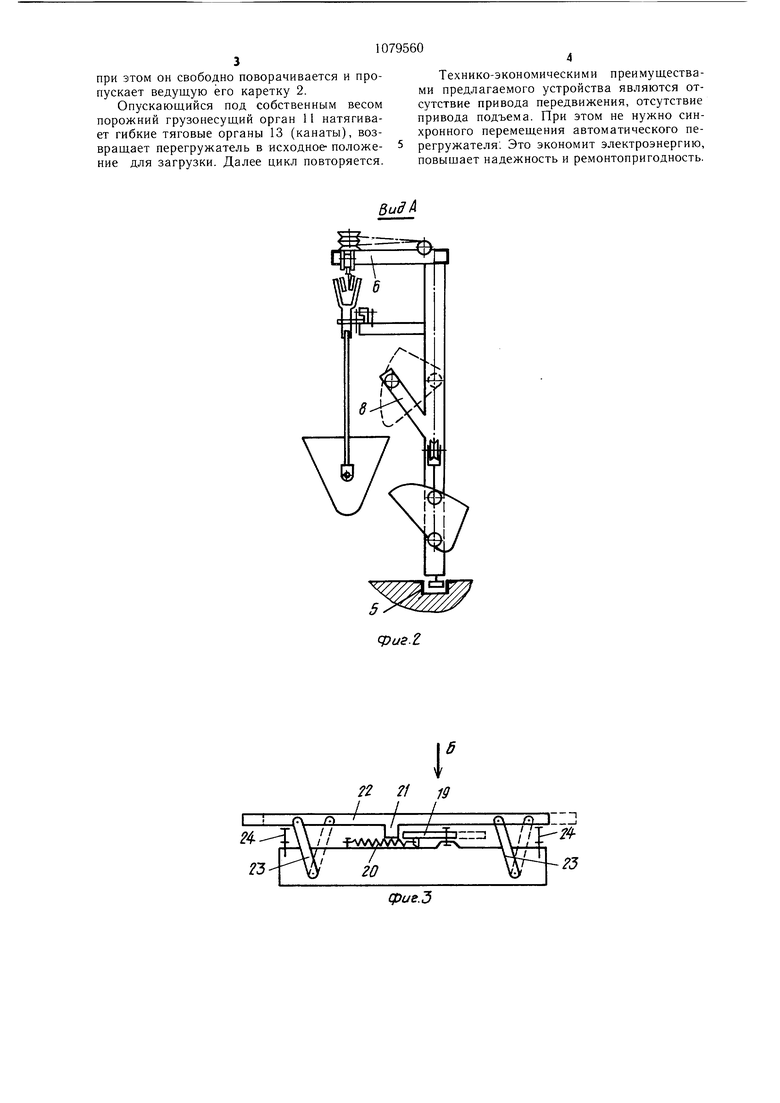
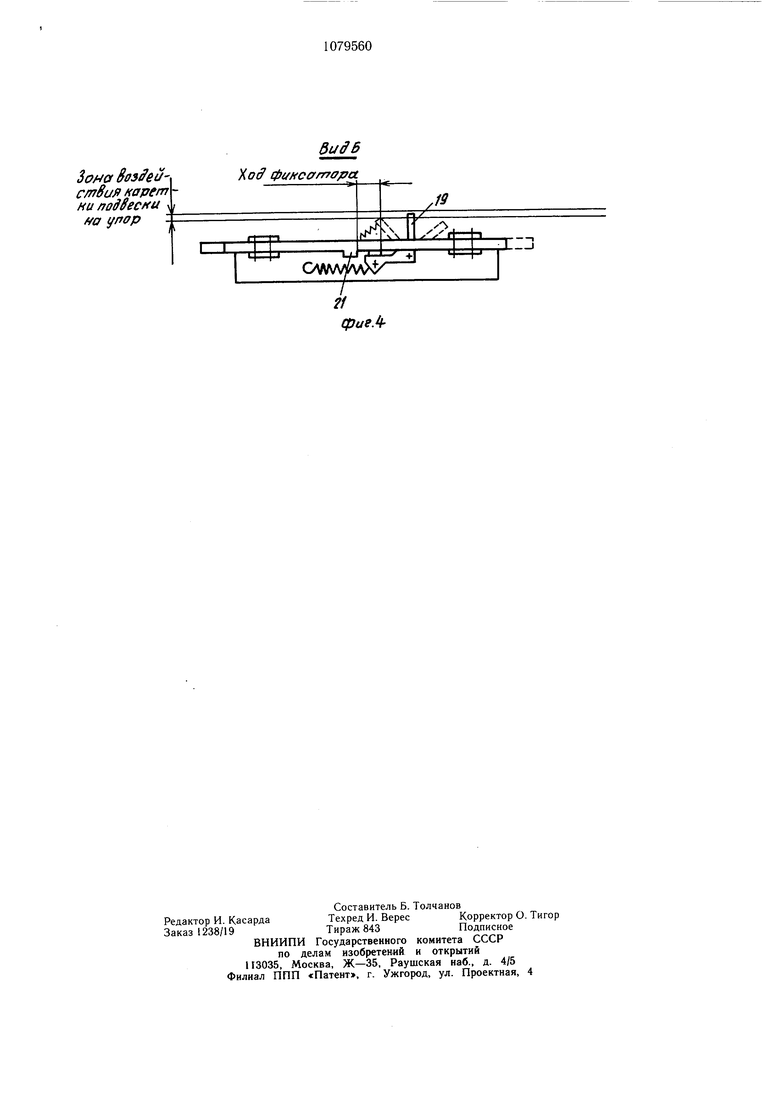
Изобретение относится к машинам непрерывного транспорта, а именно к устройствам для загрузки и разгрузки подвесных конвейе ров сыпучими, пастообразными и жидкими грузами. Известно устройство для загрузки подвесного конвейера, включающее перемещающийся от подвесного конвейера грузонесущий орган 1. Недостатком данного устройства является загрузка грузонесущего органа только на уровне подвесного конвейера. Известно также устройство для загрузки подвесного конвейера, включающее перегружатель, смонтированный на раме, установленной на рельсовом пути, проходящем параллельно ходовому пути подвесного конвейера, и выполненный в виде установленного в вертикальных направляющих грузонесущего органа, связанного с приводным гибким тяговым органом, огибающим блоки 2. Недостатками данного устройства являются сложность и громоздкость из-за применения самостоятельных приводов подъема, передвижения, а также приспособления, обеспечивающего синхронно сть передвижения подъемника с подвеской конвейера. Цель изобретения - снижение энергоемкости и повыщение надежности работы. Указанная цель достигается тем, что в устройстве для загрузки подвесного конвейера, включающем перегружатель, смонтированный на раме, установленной на рельсовом пути, проходящем параллельно ходовому пути подвесного конвейера, и выполненный в виде установленного в вертикальных направляющих грузонесущего органа, связанного с приводным гибким тяговым органом, огибающим блоки, приводной гибкий тяговый орган связан с грузонесущим органом посредством полиспастной блочной подвески и одним концом закреплен на перегружателе, а другим - на ходовом пути подвесного конвейера, при этом перегружатель снабжен упором, имеющим механизм управления. Упор установлен на перегружателе щарнирно и подпружинен. Механизм управления упором выполнен в виде установленной на перегружателе перекидной планки с фиксатором, смонтированным с возможностью взаимодействия с упором, и электромагнита, установленного на ходовом пути подвесного конвейера с возможностью взаимодействия с перекидной планкой. Перекидная планка установлена на перегружателе посредством щатунов и имеет регулируемые ограничители. На фиг. 1 показано устройство, общий вид; на фиг. 2 - вид А на фиг. 1: на фиг. 3 - механизм управления упором; на фиг. 4 - вид Б на фиг. 3. Устройство для загрузки подвесного конвейера устанавливается параллельно конвейеру, имеющему ходовой путь 1, по которому движется каретка 2 с подвеской 3. Устройство включает перегружатель, который имеет перемещающуюся по верхнему рельсу 4 и нижним направляющим 5 раму 6, снабженную вертикальными направляющими 7 с ответвлениями 8, в которых имеют возможность перемещаться направляющие катки 9 и опрокидывающие катки 10 грузонесущего органа (ковща) 11. На оси направляющих катков 9 щарнирно установлена полиспастная блочная подвеска 12, с помощью которой грузонесущий орган 11 подвещен к раме 6 перегружателя на гибких тяговых органах (в данном случае канатах) 13, которые через систему блоков 14 проведены рабочими ветвями параллельно ходовому пути 1 конвейера и жестко закреплены на кронщтейне 15 управляющего упора 16 с электромагнитом 17, включающимся по команде датчика порожней подвески 18. Упор 19 щарнирно установлен на вертикальной направляющей 7 перегружателя и удерживается в рабочем положении пружиной 20 и механизмом управления в виде фиксатора 21, расположенного на перекидной планке 22, имеющей возможность качаться на щатунах 22 до соприкосновения с регулируемыми упорами 24 под воздействием электромагнита 17 управляющего упора 16. Неподвижный упор 25 установлен в конце хода автоматического перегружателя. Устройство работает следующим образом. Порожняя подвеска 3, перемещаясь на каретке 2 по ходовому пути 1 в зону загрузки, воздействует на датчик порожних подвесок 18, который дает сигнал на механизм управления. Магнит 17 переводит перекидную планку 22 в положение, при котором находящийся на ней фиксатор 21 запирает упор 19, на который начинает воздействовать подощедшая каретка 2 с порожней подвеской 3 и увлекает перегружатель за собой. Нри этом гибкие тяговые органы (канаты) 13 через полиспастную блочную подвеску 12 начинают поднимать груженый грузонесущий орган (ковщ) 11, опрокидывающие катки которого при подъеме на загрузочную высоту заходят до упора в ответвления 8 направляющих 7, а направляющие катки 9 проходят по направляющим 7 вертикально вверх, при этом происходит опрокидывание (разгрузка) грузоподъемного органа (ковща) П. К этому моменту перегружатель подходит к неподвижному упору 25, перекидная планка 22 под его воздействием перекидывается в исходное положение, и находящийся на ней фиксатор 21 освобождает упор 19.
при этом он свободно поворачивается и пропускает ведущую его каретку 2.
Опускающийся под собственным весом порожний грузонесущий орган И натягивает гибкие тяговые органы 13 (канаты), возвращает перегружатель в исходное положение для загрузки. Далее цикл повторяется.
Технико-экономическими преимуществами предлагаемого устройства являются отсутствие привода передвижения, отсутствие привода подъема. При этом не нужно синхронного перемещения автоматического перегружателя. Это экономит электроэнергию, повыщает надежность и ремонтопригодность.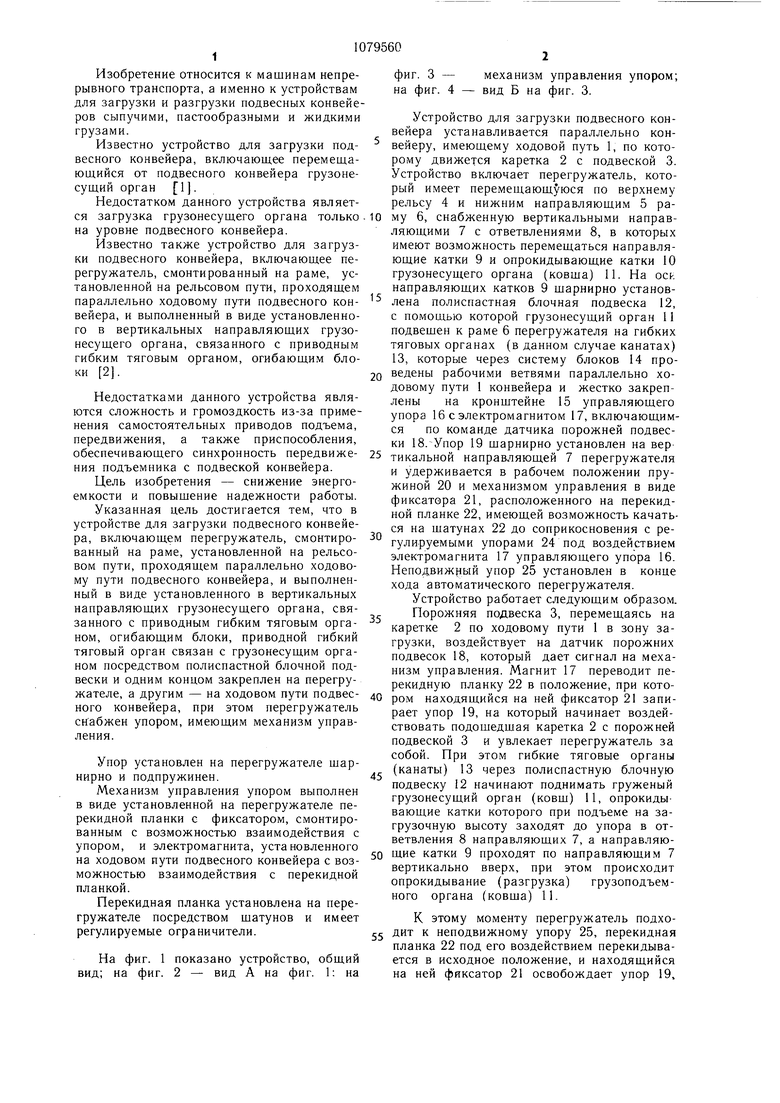
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЙ ПРОСТРАНСТВЕННЫЙ КОНВЕЙЕР | 1967 |
|
SU195372A1 |
| Устройство для передачи штучных грузов с одного подвесного конвейера на другой | 1975 |
|
SU607764A1 |
| Подвесной сортировочный конвейердля шТучНыХ гРузОВ | 1979 |
|
SU804008A1 |
| Подвесной грузонесущий конвейер | 1973 |
|
SU703435A1 |
| Подвесной конвейер | 1989 |
|
SU1738730A1 |
| Устройство для загрузки и разгрузкипОдВЕСНОгО КОНВЕйЕРА | 1978 |
|
SU819005A1 |
| Подвесной грузонесущий конвейер | 1990 |
|
SU1745635A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Подвесной грузонесущий конвейер | 1989 |
|
SU1654159A1 |
| СТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ПОДВЕСНОГО КОНВЕЙЕРА | 1985 |
|
SU1277544A1 |
1. УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ПОДВЕСНОГО КОНВЕЙЕРА, включающее перегружатель, смонтированный на раме, установленной на рельсовом пути, проходящем параллельно ходовому пути подвесного конвейера, и выполненный в виде установленного в вертикальных направляющих грузонесущего органа, связанного с приводным гибким Тяговым органом, огибающим блоки, отличающееся тем, что, с целью снижения энергоемкости и повыщения надежности работы, приводной гибкий тяговый орган связан с грузонесущим органом посредством полиспастной блочной подвески и одним концом закреплен на перегружателе, а другим - на ходовом пути подвесного конвейера, при этом перегружатель снабжен упором, имеющим механизм управления. 2.Устройство по п. 1, отличающееся тем, что упор установлен на перегружателе шарнирно и подпружинен. 3.Устройство по п. 1, отличающееся тем, что механизм управления упором выполнен в виде установленной на перегружателе перекидной планки с фиксатором, смонтированным с возможностью взаимодействия с упором, и электромагнита, установленного на с ходовом пути подвесного конвейера с можностью взаимодействия с перекидной (Л планкой. 4.Устройство по п. 1, отличающееся тем, что перекидная планка установлена на перегружателе посредством щатунов и имеет регулируемые ограничители. /tS ,,& /4 f6 / Шг/ 3 a-j 4 / ff 5/ fpue.i
Q
24ГГЛ VT
f3фие.д Зона Sosffeuc/n8uf) нарет KufjoiSecf u V f/a упор
фиеЛ Видб ф(// сагг7орл
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЛЮЛЕК i ':;: v^r" | 0 |
|
SU190263A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Голубков В | |||
| В | |||
| и Киреев В | |||
| С | |||
| Механизация погрузочно-разгрузочных работ и грузовые устройства | |||
| М., «Транспорт, 1981, с | |||
| Счетная таблица | 1919 |
|
SU104A1 |
