Изобретение относите ; :; автомобильному транспор-гу, а именно к полуприцепам с изменяемой базой,, входящего 3 состаа седельного автс поезда . Известен полуприцеп , содеркаш.ий раму, привод управления поворотной тележки, полуприцеп с изменяемой б ЗОЙ; состоя дем и (С.цвижной и неподвижной pa/N:.. j.,., . )НЬ1Х стопором Г1 1. Недостатком /к;- do::v конструкции является ТО- что (.та не имеет гри вода управления поворотной тележки вследствие чаг-о рЕздБикуто ; пс ложеник рамы псмупо-.иепа когда бс за полуприцепе ,,-.. :П1ч:ывае: гея, Сг:.и жается макезре;-:,, ,,:: i. аззтопо езда. Эго зка.чкте ьно снижает 5г;зопасность полупряп:;; пов с изменяемой Запой, Известен так;:хе полуприцеп, со-держащий раму привод управления поворотной тележки, имеющий задающий механизм, включаюи-ий в себя ве дущий Диск с пальцем, входящим в радиальный паз ведомого кинематически связакный и-- .;, тросов и заднего диска с: г ..зоротной тележкой f 21 Недостатко -; . - .1-;Струкц является то, ni ;.. :,;;;::Т бЫТЬ применена на пс: , ii.i.iu.en с lisi-ieHH-емой базой, так Kavc яе (оззоляет и менять передаточрг ь С;:,| .-,:-:-че з аа висимости от изк13 . .i-.1 цепе с нзменяе;.кп- (.рмвода уп равления поворот;-:-} телаккой заклк; чается в том,, ч-ic:- : аидому значению базы полуприцепа иот;:.К1:О :::о:этветст-вовать различное г :;:реда-::1ное отно шение привода управления i ;, -if/l-:.где -э --- угол складызани- а;зтопое;з-да, jb - угол поворота голеккй полуприцепа Ни один кз приводов управления, в т.ч. -йзвес-тный, ке обеспечивает переменKoio передаточного от ношения,, к-оторое изменялось бы автоматически в зависимости от изменения базы полуприцепа« Целью изобретения является устранение указанных недостатков, а именно, повытление безопасности движения полуприцепов с изменяемой ба ,зой и удобства,их эксплуатации путем автоматического изменения передаточного отношения привода управления при изменении базы полуприцепа , Указанная цель достигается тем, что полуприцеп,- содержащий раму, управления поворотной тележки, имеющий задающий механизм, вклю чающий в себя ведуг ий диск с пальцем, входящим в радиальный паз ведо мого диска и 1(ипемс).тически связав™ ный ПРИ ПОМГПЦИ rpQcoE И залнбго дис ка с поворотной тележкой, снабжен ползуном, 3 котором Еь:полнено гнездо; соединенным с 1:альцсм, механизмом переметения , подпружинен:ными фиксаторами, установл-енными в ведущем диске для взаимодействия с гнездом, упорами и электрическим блоком управления, состоящиг/ из двухпозиционного переключателя, конечных выключателей, электро1 ;агнктов фиксаторов и командных реле, а рама полуприцепа выполпег-а в виде подвижной и неподвижной полурам, соединенньлх стопором, причем упоры и двух-1-озиционный переключатель устаиовле;ны соответственно на подвижной и не.:с,:дБижкой полурамак OJjynpHuena вэа.имодейстзия ;о:;:щу собой, а дзухг озии.ионный пере1-::лючател;г свя iai :: 1-.:;ханкзмом iepsi--,iuGн:, ; .--тэу. .... ... :-:ОЗМО}К; ОС1Ъ.; j.-;;aK.- - -, конечными выюао-;ателями , (-:х;соки связанными с глектро;,гэ1--мигами фиксаторов . Лл о);Г, 1 изображен предла1ае:-::;:-: п;-т:од управления поворотной телекки полуприцепа, вид сверхуs на фиг, 2 - разрез А-А на фиг. 1-; на (Ьиг,, 3 -- электрический блок управления „ - Римскими цн-фрами I,- И, li -У. У на фиг, 1 показаны по ожеиия стопора при изменении базь; пол;,прицепа на Фиг. 2 - соответстБуждие этим nOJiOiKe Кхям подпружиненнс1е фи оатоуя -, алектрсмагнитами/. Полуприцеп с изменяемой базой имеет подвижную 1 i; неподвижную 2 . На полуприцепе установлен при-ЙОД управления поворотной тега:-;ки ссстояк:ий из задаю пего механизма 3 и заднего диска 4 с поворотной тележксй 5, соединенных тросами б, Задаю1дкй механизм 3 состоит из ведущего 7 и ве,цомого с ра,г|,иальным пазом 8 дисков. На ведущем диске 7 установлен 9, выполненный заодно с пальцем 10. Вблизи ползуна 9 установлены подпружиненные фиксаторы 11, количество которых совпа.,цает с числом изменяемых положений базы полуприцепа,, Около ползуна 9 установлен также механизм его перемещения, например электромагниты 12 (на электросхеме Р4 и Р5)„ Снизу каждого из подпружиненных пружинами 13 фиксаторов 11 смойтированы электромагниты 14 (ЭМ1, ЭМ2, ЭМЗ, ЭМ4, ЭМ5}. В гнезде прлзуна 9 смонтирован конечный выключатель 15 (ВКФ). На подвижной раме 1 полуприцепа установлены поры 16, на неподБИжной раме 2 установлены стопор 17 и двухпозиционный переключатель 18 (ВКП-) ,, а на одвижной раме конечные выключатели 19 (ВК1, ВК2, ,ВКЗ, ВК4 , ВК5). В олзуне 9 выполнено гнездо 20, В
электрическом блоке управления имеются также командные реле Р1, Р2,РЗ.
Работа привода управления поворотной тележки полуприцепа с изменяемой базой происходит следующим образом.
При изменении азы полуприцепа происходит соответственно: изменение положения пальца 10 на ведущем диске 7. Для автоматического изменения положения пальца 10 взаимодействуют два механизма: перемещения ползуна 8 и втягивания фиксаторов 11. При удлинении базы полуприцепа, например с П положения на 1У, подвижная рама 1 полуприцепа перемещается вперед, ползун 9, выполненный заодно с пальцем 10, фиксируется в гнезде 20 фиксатором 11 1У положения взамен фиксатора 11 Т1 положения. Для этого | иксатор 11 И положения под действием электромагнита 14 П положения ЭМ2 втягивается и выходит из гнезда 20 ползуна 9, взамен его под действием пружины 13 выходит фиксатор 11 1У положения, при этом электромагнит 14 1У положения ЭМ4 обесточен, остальные электромагниты - ЭМ1 ЭМЗ, ЭМ5 - находятся под током и втягивают соответствующие фиксаторы 11. Ползун 9 пальца 10 под действием механизма перемещения - электромагнита 12 (Р4 /, перемещается вперед (.фиг. 2 влево и, так как в этом время фиксатор Ц ТУ положения выступает, а остальные фиксаторы II 1, 11, Ш, У положений втянуты, фиксатор 11 1У положения западает в гнездо 20 ползуна 9, фиксируя таким образом ползун 9 и вместе с ним палец 10-ведущего диска 7.
.Работа электрического блока управления при этомпроисходит следующим образом.
При исходном зафиксированйом на П положении подвижной рамы 1 полупрцепа конечный выключатель 1 9 П положения ВК2, взаимодействующий со стопором 17, нажат, остальные конечные выключатели 19 - ВК1, ВКЗ, ВК4, ВК5 - свободны. При этом электромагнит 14 П положения ЭМ2 отвода Фиксатора 11 отключен, вследствие чего соответствюущий И положению .фиксатор 11 под действием пружины 1 удерживается в гнезде 20 ползуна 9, |1ажимая конечный выключатель 15 (ВКФ ), остальные электромагниты 14 ЭМ1 , ЭМЗ, ЭМ4 , ЭМЗ - Бклк1чены г, удерживают cooтвeтcтв,ющиe фиксатоуы 11 в убранном положении. Кроме того, электромагниты 12 ( Р4 и Р5.) и командные реле Р2, РЗ отключены,командное реле Р1, связанное с конечным выключателем 15 (ВКФ |, включено. При переводе подвижной рамы 1 полуприцепа со П и 1У положения выжимается стопор 17, при этом осво0бождается конечный выключатель 19 П положения ВК2.
При перемещении подвижной раь-ы 1 полуприцепа со И на 1У положение упором 16 включается двухпозиционный переключатель 18 (ВКП - -), замыкая
5 контакты, связанные с электромагнитом 12 (Р4) перемещения ползуна 9 вперед
(на схеме влево), при этом выключается командное реле Р2. Реле Р2 своими нормально открытыми контакта0ми включает все электромагниты 15 отвода фиксаторов 11. Происходит отвод всех фиксаторов 11 ползуна 9. При достижении подвижной рамой 1 полуприцепа 1У положения стопор 17 фиксирует
5 подвижную раму 1, при этом нажимается конечный выключатель 19 1У положения ВК4, который отключает электромагнит 14 - 1У положения ЭМ4, вследствие чего соответствующий 1У положе0нию фиксатор 11 под действием пружины 13 выходит вверх, в то же время включается в цепь электромагнит 12
(Р4), происходит перемещение ползуна 9 вперед (на схеме влево )до захода выступающего, соответствующего 1У ,
5 положению, фиксатора 11 в гнездо 20 ползуна 9. При этом фиксатор 11 нажимает на конечный выключатель 15 (ВКФ ), который отмыкает электромагнит 12 (Р4 ), затем происходит от0ключение перемещения ползуна 9 и включение командного реле Р1. Командное реле Pi отключает электросхему электрического блока управления, которая находится опять в ис5ходном положении.
Наличие предлагаемого привода управления поворотной тележки полуприцепа с изменяемой базой позволя0ет автоматически изменять передаточное отношение привода управления при изменении базы полуприцепов что в свою очередь обеспечивает повышение безопасности их движения и удобство их эксплуатации.
5

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения размера разгрузочной щели конусной дробилки | 1977 |
|
SU733725A1 |
| Привод управления поворотными тележками полуприцепа | 1977 |
|
SU709449A1 |
| Система автоматической подачи кабеля в рабочий орган самоходного кабелеукладчика | 1988 |
|
SU1717743A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Устройство для регулирования перемещения и компенсации износа режущего инструмента | 1972 |
|
SU440245A1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| Автоматическая линия для изготовления стержней | 1986 |
|
SU1386359A1 |
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| Транспортное средство | 1985 |
|
SU1320095A1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |

ПОЛУПРИЦЕП, содержащий раму, привод управления поворотной тележки, имеющий задающий механизм включающий в себя ведущий диск с пальцем, входящим в радиальный паз ведомого диска и кинематически связанный при помощи тросов к заднего диска с поворотной тележкой, о т лича. ющийся тем, что, с 19 целью поЕьшзения безопасности движения полуприцепа путем автоматического изменения передаточного отношения привода управления при изменении базы полуприцепа, он снабжен ползуном,- в котором выполнено гнездо, соединенным с пальцем, мех анизмом перемещения ползуна, подпружиненными фиксаторами, установленными в ведущем диске для взаимодействия с гнездом, упорами и .электтрическим блоком управления, состоящим из двухпозиционного переключателя , конечных выключателей, электромагнитов фиксаторов и командных реле а рама полуприцепа выполнена в виде подвижной и неподвижной полурам, соединенных стопором, причем упоры и двухпозиционный пере-; ключатель установлены соответственйо на подвижной и неподвижной полурамах пс..луг1рицепа для взаимодействия между собой,- а двухпозиционный переключатель связан с механизмом перемещения ползуна через командное реле, и стопор,- установленный с возможностью взаимодействия с конечными выключателями, электрически связанными с электромагнитами фиксаторов.. / f S/f f 16 1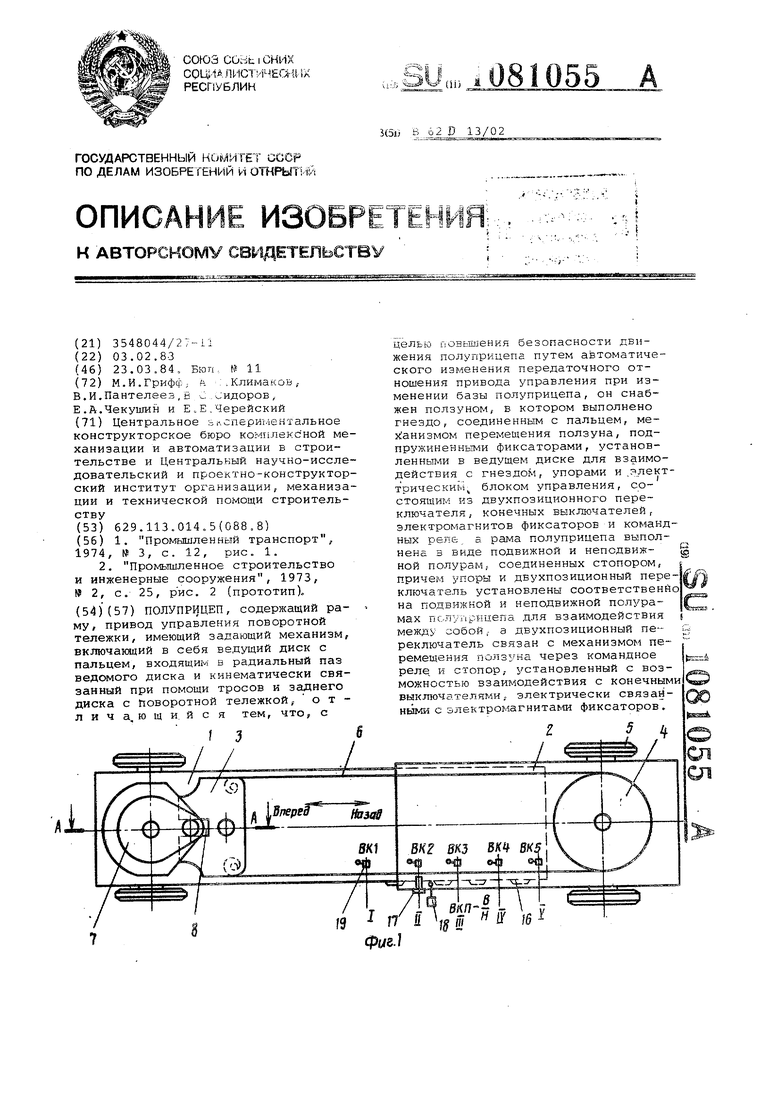
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный транспорт, 1974, № 3, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Промьшленное строительство и инженерные сооружения, 1973, № 2, с, 25, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
