54) МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1569223A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Инерционный привод | 1986 |
|
SU1371844A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Автомат для сборки конических подшипников | 1990 |
|
SU1787226A3 |
| Линия для динамической балансировки роторов электродвигателей | 1987 |
|
SU1490521A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |

Изобретение огносится к машиноёгроп екию, а именно к манипулягорам для ыеханизации.и авгоматизагши гехнологичесних процессов.
Известен манипулягор, содержащий электропривод и кулачковую систему управления 1 .
Недостатками этого манипулятора являются слохсность конструкции и отсутствие возможности регулировки вертикального хода руки.
Цель изобретения упрощение конструкции и рас цирение технологических возможностей за счет возможности захвата деталей, расположенных на разной высоте и увеличение хода руки.
Указанная цель достигается тем, что шариковые направляющие вьшолнены из неподвижной центральной части, двух подвижных частей, сепаратора, выполненного в виде скобы, охватывак)щей неподвижную центральную часть шариковых направл5пощих, и поводка, связанного с рычагом кулачково-рьгаа-жного механнзма.
при этом рычаг указанного механизма выполнен из шарнирно связанных звеньев, подпружиненных относительно друг друга, а схват снабжен дополнительно Введенной кареткой, подпружиненной относительно механической руки.
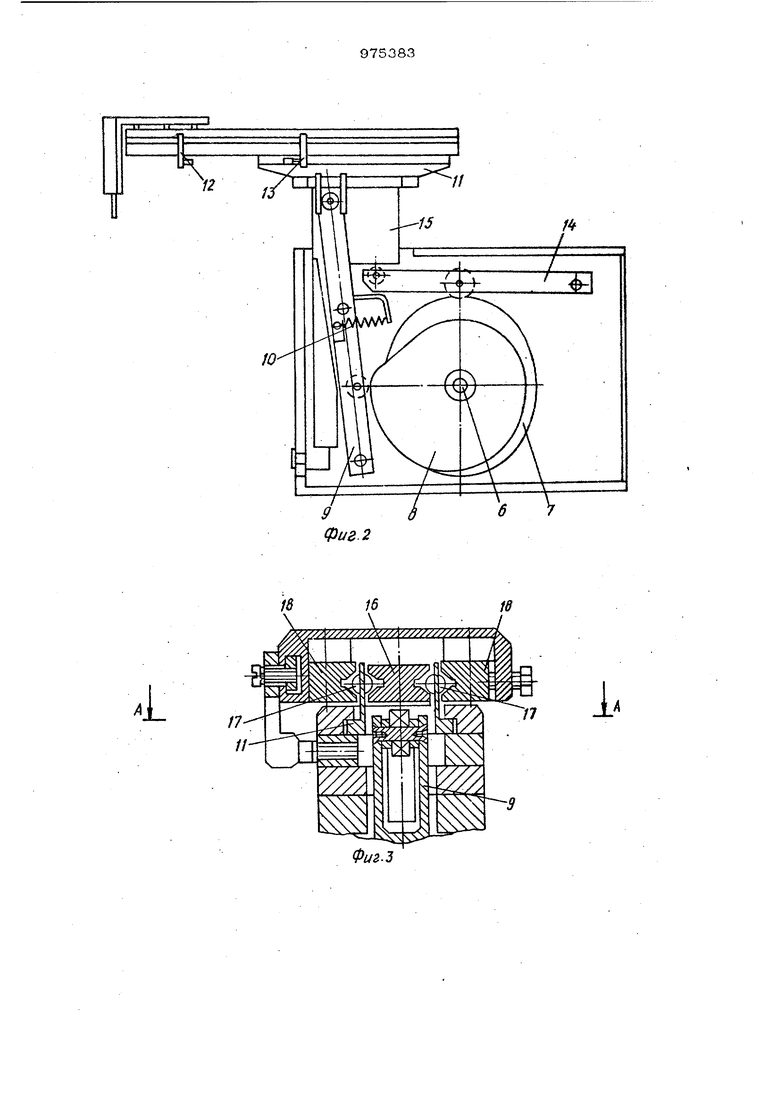
На фиг. I изображен манипулятор, общий вид; на фиг. 2 - схема манипулятора; на фиг, 3 - схема шарикового линейного редуктора; да фиг. 4 - сече10ние А-А на фиг. 3; на фиг. 5 - схема схвата.
Манипулятор содержит корпус I, руку 2 с вакуумным схватом 3, электродвигатель 4, червячный редуктор 5, распределительный вал 6 (фиг. 2), иа котором расположены кулачок 7 вертикального перемацения и кулачок 8 горизонгальйого п етлещения, взаимодействующий с двухэвенным рычагом 9 го20 .рихзонтального перемещения, .имекицим упругий элемент 1О, и соединенным поводком сепаратора It, передакяцим движевие руке с расположенными на ней упорами .3 . .9 12 и 13, позволяющими регулировать BeraK4iiHy горизонтального хода. Кулачок 7вергикального перемещения взаимодействует с рычагом 14 вертикапького перемещения, на который опирается каретк а 15 вергтсального хода с расположенной на ней неподвижной частью горизонтальной направляющей 16 руки (фиг, 3), От рычага У горизонтального перемодени движение передается через сепаратор 11 шарикам 17. Шарики, обкатываясь по,неподвижной части направляющих, передают движение направляющим 18, установленным на руке. Конструкций схвата содерчсит вакуумный присос 19, подвижную каретку 2О, перамещаемую под действием компенсацио ного давления пружины 21, регулируемой винтом 22, Е - величина свободного пере мещения вак;уумного схвата, регулируемы упоры 23 положения корпуса схвата, винт 24 крепления корпуса схвага на руке 2 и винт 25, служащий для дополнительной регулировки положения присоса 1 Маш-шулятор: работает образомОт двигателя 4 через редуктор 5 вращегше передается на распределительный вал 6, на котором расположены 7 вертикального и кулачки 8 горизонт альнего пермещений. Профиль 7 и 8определяет закон движешш руки манипулятора. От кулачка 7, через рычаг 14 вертикально перемещается каретка 15 с РУ1СОЙ 2, От кулачка 8 через двухзвениый рычаг 9 горизонтально перемадается сепаратор 11, который приводит в движение шарики 17 относительно неподвижной части направляющих 16. При этом движение передается направляющим 18, ук репленным на руке. Для работы с хруп834кими деталями манипулятор снабжен устройством, плавно регулир аощ1а1 усилие прижима вакуумного присоса к схватываемой, детали. Упорами 23 корпус схвата устанавливают в нужном положении и производят дополнительную регулировку винтом 25, после чего винтом 22 регулируют усилие контактирования схвата с деталью. Формула изобретения Манипулятор, содержащий привод, кинематически связанный посредством ку„ лачково-рычажного механизма с механической рукой, несущей схват, например вакуумный, и установленной на шариковых направляющих, отличающийс я тем, что с целью упрощения констр тсции и расширения технологических возможностей за счет увеличения хода pjaiH, шариковые направляющие выполнены из неподвика ой цетральной части, двух неподвижных частей, сепаратора, выполненного в виде скобы, охватывающей неподвижную центральную часть шариковых направляющ11х, и поводка, связанного с рычагом кулачково-рычажного механизма, при этом рычаг указанного механизма вьшолнен из шарнирно связанных звеньев, подпружиненных относительно друг друга, а схват снабжен дополтштельно введенной кареткой, подпружиненной относительно механической руки. Источники информации, принятые во внимание при экспертизе 1, Заявка Франции № 2284418, кл, В 253 З/ОО, опублик, 1976.
j
1в
Фиг.З
iO
5J
фы 5
