Изобретение относится к иромышленному транспорту, а именно к устройствам для неремещения штучных грузов во взаимно перпендикулярных направлениях.
Известно устройство для перемещения штучных грузов во взаимно перпендикулярных направлениях, содержащее подающий приводной рольганг, расположенный под прямым углом к нему приемный рольганг и перегрузочный механизм, выполненный в виде расположенных между роликами подающего рольганга дисков с лысками, закрепленных на параллельных валах, расположенных ниже осей роликов подающего рольганга и перпендикулярно им, причем все валы связаны с приводом их вращения 1. Однако такое устройство не обеспечивает достаточной надежности работы, особенно при транспортировании тяжеловесных грузов типа литейных форм или грузов, покрытых смазочными материалами, например поддонов с деталями после их извлечеНИИ из масляного закалочного бака. В этом случае происходит проскальзывание рабочей поверхности дисков относительно нижней поверхности грузов вследствие того, что сила трения между дисками и грузом меньше усилия, необходимого для преодоления силы сопротивления грузов их перемещению по приемному рольгангу. Невозможность транспортирования устройством тяжеловесных и покрытых смазочнь ми материалами грузов сужает область его применения. Известно также устройство для перемеЦ1,епия щтучных грузов во взаимно перпендикулярных направлениях, содержащее подающий приводной рольганг, расположенный под прямы.м углом к нему приемный рольганг и перегрузочный механизм, представляющий собой размещенные между роликами подающего рольганга диски с выступами и лысками, жестко закрепленные на приводных параллельных валах, распо ложепных ниже осей роликов подающего рольганга и перпендикулярно им 2. В данном устройстве соотношение длины груза и размеров диска (длина грузонесущей поверхности диска) должно обеспечивать прохождение груза через перегрузочный механизм за один оборот дисков. В случае, если л;1ина груза больше длины грузонесущей поверхности дисков, груз не покинет перегрузочный механизм и опустится полностью или частично на ролики подающего рольганга. Если последний не выключен, то произойдет смещение груза по направлению вращения роликов подающего рольганга. Для полного прохождения груза через перегрузочный механизм необходимо повторно повернуть диски, при этом выступы дисков, выполненные на их грузонесущей поверхности, могут упереться в груз не сбоку,, а снизу, что приведет к вертикальному смещению груза, а также
к его повреждению. Все это снижает надежность работы устройства.
Цель изобретения - повышение надежности работы устройства.
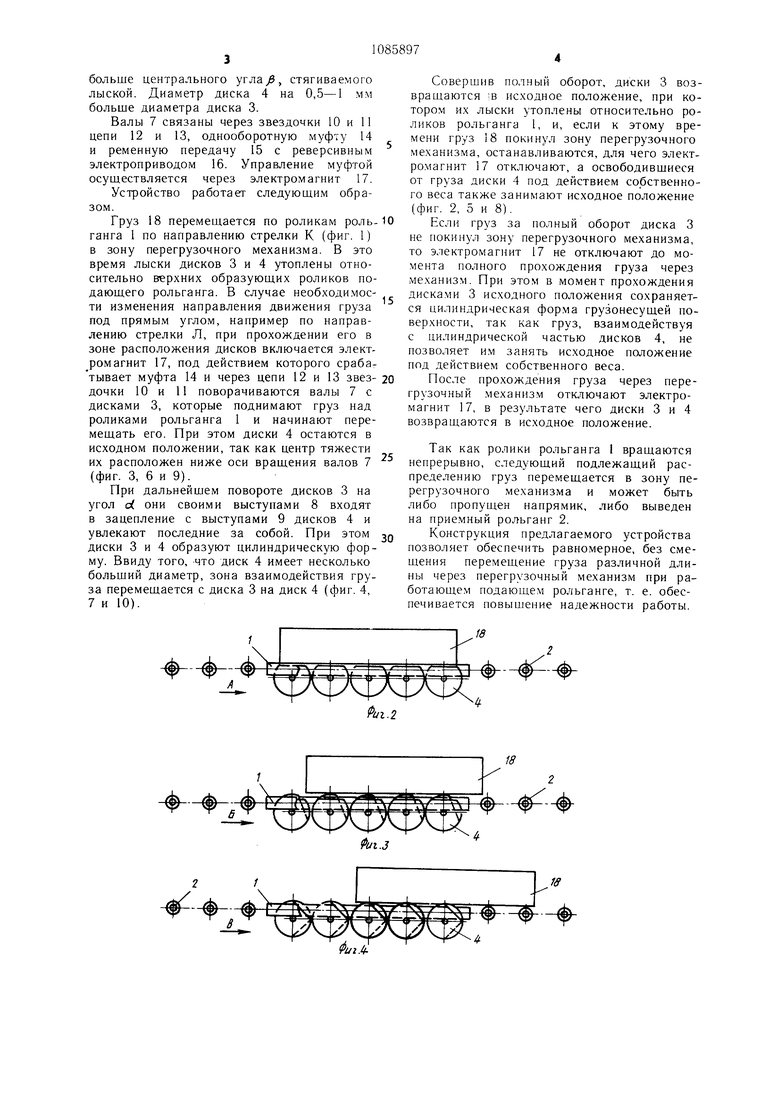
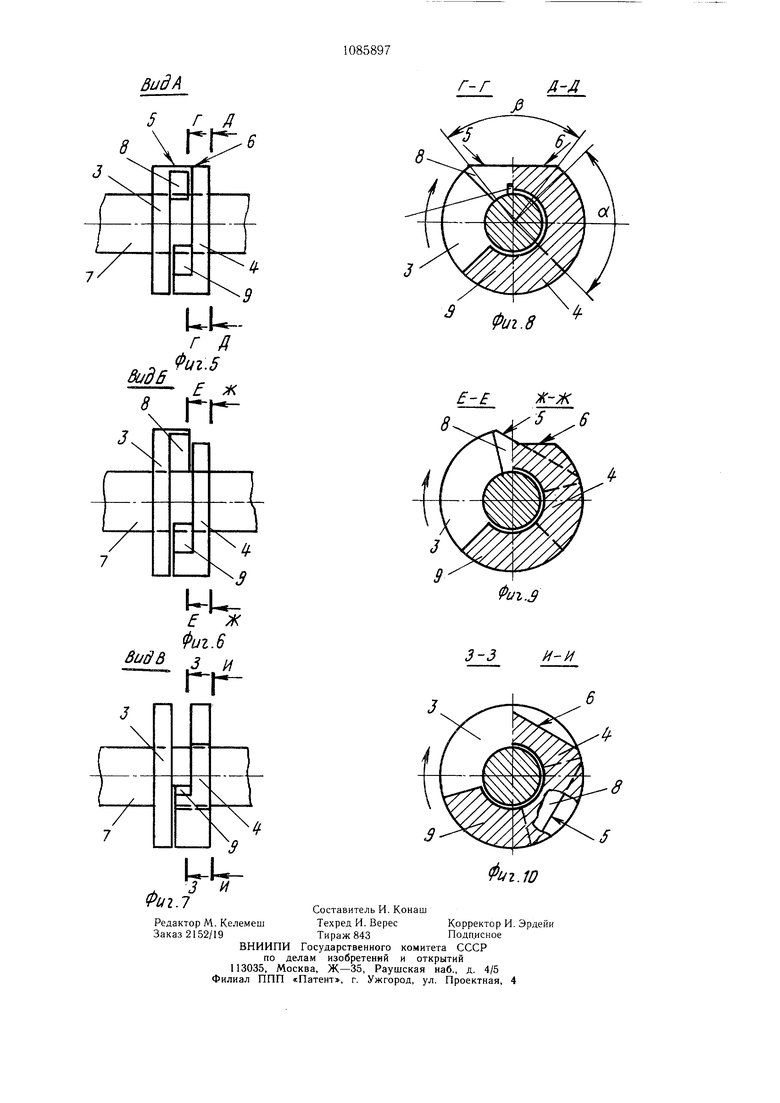
Указанная цель достигается тем, что в устройстве для перемещения штучных грузов во взаимно перпендикулярных направлениях, содержащем подающий приводной рольганг, расположенный под прямым углом к нему приемный рольганг и перегрузочный механизм, представляющий собой размещенные между роликами.подающего рольганга диски с выступами и лысками, жестко закрепленные на приводных параллельных валах, расположенных ниже осей роликов подающего рольганга и перпендикулярно им, перегрузочный механизм снабжен свободно установленными по одному на упомянутых валах рядом с жестко закрепленными дисками дополнительными дисками с выступами и лысками, при этом выступы обоих дисков в каждой паре выполнены на их смежных торцовых сторонах у первых с совпадением их верхних и V первых с совпадением их поверхностей с лысками, а у вторых - диаметрально противоположно лыскам. На фиг. 1 схематично изображено предлагаемое устройство, обший вид; на фиг. 2 - то же, в исходном положении, вид сбоку; на фиг. 3 - то же, в одном рабочем положении; на фиг. 4 - то же, в другом рабочем положении; на фиг. 5 - вид А на фиг. 2; на фиг. 6 - вид Б на фиг. 3; на фиг. 7 - вид В на фиг. 4; на фиг. 8 - совмещенный разрез по Г-Г и Д-Д на фиг. 5; на фиг. 9 - то же, но Е-Е и Ж-Ж на фиг. 6; на фиг. 10 - то же, по 3-3 и И-И на фиг. 7. Устройство содержит подающий приводной рольганг 1, расположенный под прямы.м углом к нему приемный рольганг 2 и перегрузочный механизм, выполненный в виде размещенных между роликами рольганга 1 дисков 3 и 4, расположенных рядом один с другим. Диски 3 и 4 выполнены с лысками соответственно 5 и б и установлены на параллельных валах 7, расположенных ниже осей роликов подающего рольганга и перпендикулярно им. Диски 3 закреплены на валах 7 жестко, а диски 4 установлены свободно. На с.межных торцовых сторонах дисков 3 и 4 выполнены выступы соответственно 8 и 9. Выступ 8 жестко закрепленного диска 3 размещен таким образом, что его верхняя новерхность совпадает с лыской 5, а выступ 9 диска 4 расположен диаметрально противоположно лыске 6, вследствие чего центр тяжести диска 4 расположен ниже оси вращения по направлению от лыски. Благодаря свободной установке на валу диска 4 и зазоров между выступами 8 и 9, диск 4 имеет возможность поворота OJHOCHтельно диска 3 на угол о(, который равен или больше центрального угла;, стягиваемого лыской. Диаметр диска 4 на 0,5-1 мм больше диаметра диска 3. Валы 7 связаны через звездочки 10 и 11 цепи 12 и 13, однооборотную муфту 14 и ременную передачу 15 с реверсивным электроприводом 16. Управление муфтой осуш,ествляется через электромагнит 17. Устройство работает следуюшим образом. Груз 18 перемеш.ается по роликам рольГанга 1 по направлению стрелки К (фиг. 1) в зону перегрузочного механизма. В это время лыски дисков 3 и 4 утоплены относительно верхних образующих роликов подающего рольганга. В случае необходимоети изменения направления движения груза под прямым углом, например по направлению стрелки Л, при прохождении его в зоне расположения дисков включается электромагнит 17, под действием которого срабатывает муфта 14 и через цепи 12 и 13 звездочки 10 и 11 поворачиваются валы 7 с дисками 3, которые поднимают груз над роликами рольганга 1 и начинают перемещать его. При этом диски 4 остаются в исходном положении, так как центр тяжести их расположен ниже оси вращения валов 7 (фиг. 3, 6 и 9). При дальнейшем повороте дисков 3 на угол с( они своими выступами 8 входят в зацепление с выступами 9 дисков 4 и увлекают последние за собой. При этом диски 3 и 4 образуют цилиндрическую форму. Ввиду того, ЧТО диск 4 имеет несколько больщий диаметр, зона взаимодействия груза перемещается с диска 3 на диск 4 (фиг. 4, 7 и 10). Совершив полный оборот, диски 3 возвращаются В исходное положение, при котором их лыски утоплены относительно роликов рольганга 1, и, если к этому времени груз 18 покинул зону перегрузочного .механизма, останавливаются, для чего электромагнит 17 отключают, а освободившиеся от груза диски 4 под действием собственного веса также занимают исходное положение (фиг. 2, 5 и 8). Если груз за полный оборот диска 3 не покинул зону перегрузочного механизма, то электромагнит 17 не отключают до момента полного прохождения груза через механизм. При этом в момент прохождения дисками 3 ис.ходного положения сохраняется цилиндрическая форма грузонесущей - - верхности, так как груз, взаимодействуя с цилиндрической частью дисков 4, не позволяет им занять исходное положение под действием собственного веса. После прохождения груза через перегрузочный механизм отключают электромагнит 17, в результате чего диски 3 и 4 возвращаются в исходное положение. Так как ролики рольганга I вращаются непрерывно, следующий подлежащий распределению груз перемещается в зону перегрузочного механизма и может быть либо пропущен напрямик, либо выведен на приемный рольганг 2. Конструкция предлагаемого устройства позволяет обеспечить равномерное, без смещения перемещение груза различной длины через перегрузочный механизм при работающем подающем рольганге, т. е. обеспечивается повышение надежности работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения грузов в двух взаимно перпендикулярных направлениях | 1984 |
|
SU1197954A1 |
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1981 |
|
SU948787A2 |
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1971 |
|
SU470159A1 |
| Устройство для транспортирования штучных грузов | 1979 |
|
SU789354A1 |
| Устройство для загрузки конвейера штучными грузами | 1980 |
|
SU945019A1 |
| Устройство для передачи штучных грузов | 1980 |
|
SU906856A1 |
| Склад штучных грузов | 1980 |
|
SU992345A1 |
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1986 |
|
SU1419952A1 |
| Устройство для межоперационного транспортирования грузов | 1975 |
|
SU601207A1 |
УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ ВО ВЗАИМНО ПЕРПЕНДИКУЛЯРНБ1Х НАПРАВЛЕНИЯХ, содержащее подающий приводной рольганг, расположенный под прямым углом к нему приемный рольганг и перегрузочный механизм, представляющий собой размещенные между роликами подающего рольганга диски с выступами и лысками, жестко закрепленные на приводных параллельных валах, расположенных ниже осей роликов подающего рольганга и перпендикулярно им, отличающееся тем, что, с целью повышения надежности работы, перегрузочный механизм снабжен свободно установленными по одному на упомянутых валах рядом с жестко закрепленными дисками дополнительными дисками с выступами и лысками, при этом выступы обоих дисков .ь каждой паре выполнены на их смежных торцовых сторонах и у первых с совпадением их верхних поверхностей с лысками, а у вторых - диаметрально противоположно лыскам. S оо ел оо со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1971 |
|
SU470159A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях | 1981 |
|
SU948787A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
