(54) .УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ШТУЧНЫХ
1
Изобретение относится к промышленному транспорту, а именно к устройствам для передачи штучных грузов.
Известно устройство для подачи штучных грузов, содержащее приводной рольганг, механизм цикличного включения привода рольганга, грузовую платформу, связанную с несущими элементами и с кареткой, приводимой в возвратнОйоступательное движение от пневмопривода. Механизм включения привода рольганга выполнен в виде диска с кулачками, по торцовой поверхности которого выполнены цевки, с которыми взаимодействует при своем движении собачка, установленная накаретке 1.
Недостатком указанного устройства является сложность его конструкции.
Известно также устройство для передачи штучных грузов, содержащее раму с установленными на ней грузонесущими ролика.ми, отсекающий рычаг, расположенный между роликами, копирную линейку и приводной механизм для роликов с пневмоцилиндром, установленным на неподвижном основании 2).
ГРУЗОВ
Однако это устройство недостаточно эффективно в работе, так как для регулирования выдачи щтучных грузов используются дополнительные механизмы.
Цель изобретения - повышение эффективности работы устройства.
Поставленная цель достигается тем, что устройство снабжено ползуном, установленными на основании -направляющими, в которых расположен ползун, шарнирно прикрепленной к ползуну зубчатой рейкой, имеющей двустороннее внутреннее зацепление, и щестерней, взаимодействующей с рейкой и кинематически связанной с грузонесущими роликами, при этом рейка соединена со штоком пневмоцилиндра, а копирная линейка закреплена на ползуне.
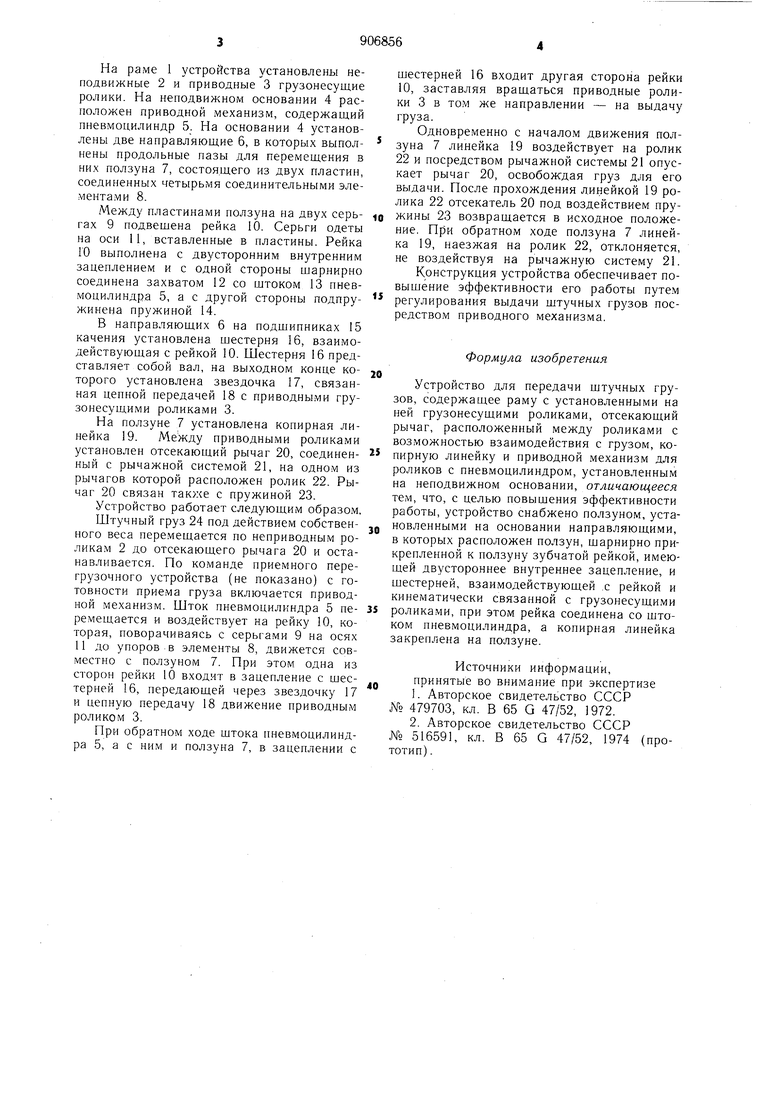
На фиг. 1 изображено устройство для передачи штучных грузов, вид сбоку; на фиг. 2 - приводной механизм, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на
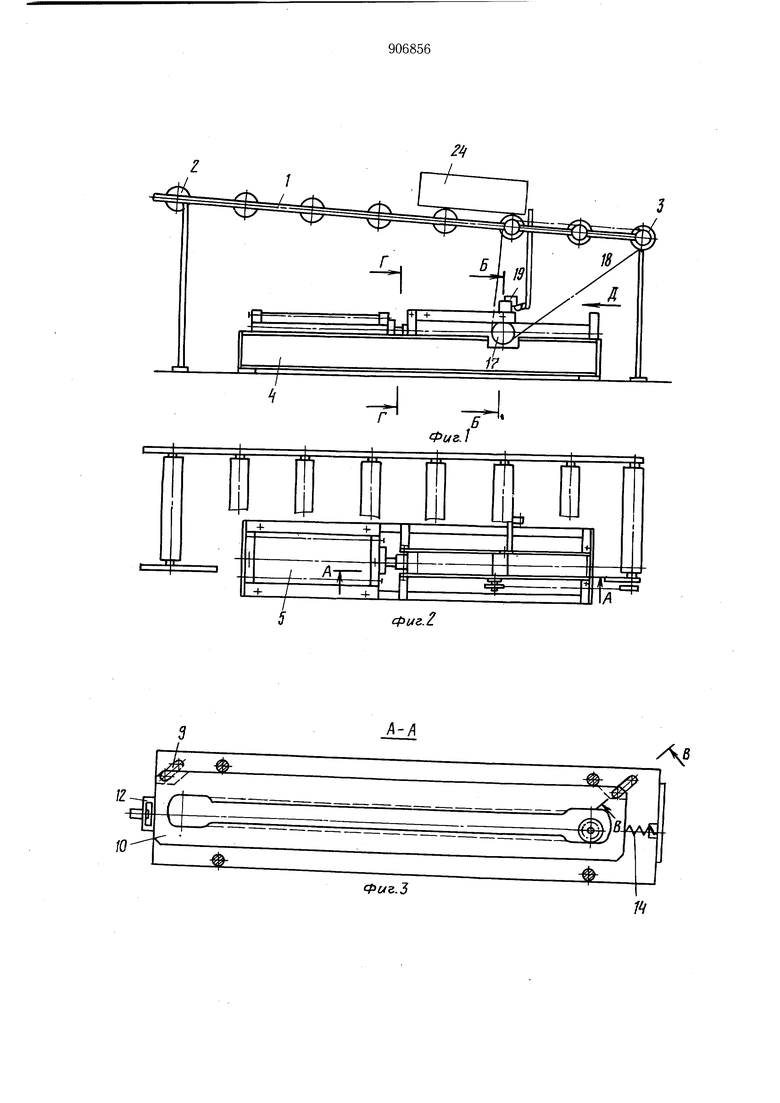
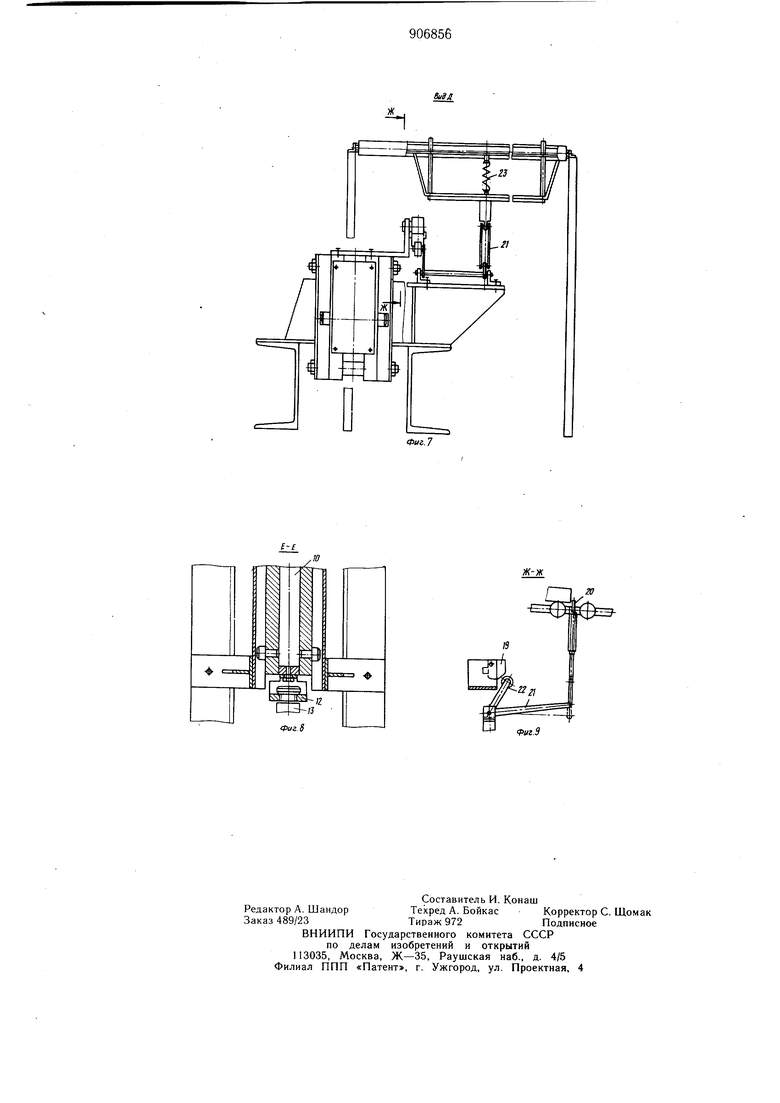
20 фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5разрез В-В на фиг. 3; на фиг. 6 - разрез Г-Г на фиг. 1; на фиг. 7 - вид Д на фиг. 1; на фиг. 8 - разрез Е-Е на фиг. 6; на фиг. 9 - разрез Ж-Ж на фиг. 7.
На раме 1 устройства установлены неподвижные 2 и приводные 3 грузонесущие ролики. На неподвижном основании 4 расположен приводной механизм, содержаодий пневмоцилиндр 5. На основании 4 установлены две направляющие 6, в которых выполиены продольные пазы для перемещения в них ползуна 7, состоящего из двух пластин, соединенных четырьмя соединительными элементами 8.
Между пластинами ползуна на двух серьгах 9 подвешена рейка 10. Серьги одеты на оси 11, вставленные в пластины. Рейка ГО выполнена с двусторонним внутренним зацеплением и с одной стороны шарнирно соединена захвато.м 12 со штоком 13 пневмоцилиндра 5, а с другой стороны подпружинена пружиной 14.
В направ.тяющих 6 на подщипниках 15 качения установлена шестерня 16, взаимодействующая с рейкой 10. Шестерня 16 представляет собой вал, на выходном конце которого установлена звездочка 17, связанная цепной передачей 18 с приводными грузонесущими роликами 3.
На ползуне 7 установлена копирная линейка 19. Между приводными роликами установлен отсекаюший рычаг 20, соединенный с рычажной системой 21, на одно.м из рычагов которой расположен ролик 22. Рычаг 20 связан также с пружиной 23.
Устройство работает следующим образом
Штучный груз 24 под действием собственного веса перемешается по неприводным роликам 2 до отсекающего рычага 20 и останавливается. По ко.манде приемного перегрузочного устройства (не показано) с готовности приема груза включается приводной механизм. Шток пневмоцилиндра 5 перемещается и воздействует на рейку 10, которая, поворачиваясь с серьгами 9 на осях 11 до упоров в элементы 8, движется совместно с ползуном 7. При этом одна из сторон рейки 10 входит в зацепление с шестерней 16, передающей через звездочку 17 и цепную передачу 18 движение приводным роликом 3.
При обратном ходе щтока пневмоцилиндра 5, а с ним и ползуна 7, в зацеплении с
шестерней 16 входит другая сторона рейки 10, заставляя вращаться приводные ролики 3 в том же направлении - на выдачу груза.
Одновременно с началом движения ползуна 7 линейка 19 воздействует на ролик 22 и посредством рычажной системы 21 опускает рычаг 20, освобождая груз для его выдачи. После прохождения линейкой 19 ролика 22 отсекатель 20 под воздействием пружины 23 возвращается в исходное положение. При обратном ходе ползуна 7 линейка 19, наезжая на ролик 22, отклоняется, не воздействуя на рычажную систему 21.
Конструкция устройства обеспечивает повышение эффективности его работы путем регулирования выдачи штучных грузов посредством приводного механизма.
Формула изобретения
Устройство для передачи штучных грузов, содержащее раму с установленными на ней грузонесущими роликами, отсекающий рычаг, расположенный между роликами с возможностью взаимодействия с грузом, копирную линейку и приводной механизм для роликов с пневмоцилиндром, установленным на неподвижном основании, отличающееся тем, что, с целью повышения эффективности работы, устройство снабжено ползуном, установленными на основании направляющими, в которых расположен ползун, щарнирно прикрепленной к ползуну зубчатой рейкой, имеющей двустороннее внутреннее зацепление, и шестерней, взаимодействующей .с рейкой и кинематически связанной с грузонесущими роликами, при этом рейка соединена со штоком пневмоцилиндра, а копирная линейка закреплена на ползуне.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 479703, кл. В 65 G 47/52, 1972.
2.Авторское свидетельство СССР
№ 516591, кл. В 65 G 47/52, 1974 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разделения грузов | 1978 |
|
SU768723A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Манипулятор с кантователем к обжимному стану | 1936 |
|
SU51014A1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ ИГЛОФРЕЗ | 1991 |
|
RU2018418C1 |
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО РОБОТИЗИРОВАННОЙ ЛИНИИ СБОРКИ-СВАРКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1990 |
|
SU1737838A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Транспортная тележка автоматической линии | 1985 |
|
SU1414562A1 |
| АВТО/\^АТИЧЕСКАЯ ЛИНИЯ УПАКОВКИ ИЗДЕЛИЙ | 1973 |
|
SU408741A1 |
| Устройство для передачи груза с подвесного конвейера на рольганг | 1984 |
|
SU1217751A1 |
Лв
г
юФиг.З
W
i
б-Б
15
фиг. 5
i.
4
tpuzS
