(54) УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ КОНВЕЙЕРА ШТУЧНЫМИ ГРУЗАМИ
1
Изобретение относится к транспортированию штучных изделий, имеющих преимущественно форму прямоугольного параллелепипеда, в частности к транспортированию объектов в рабочую зону промыщленного робота для дальнейших манипуляционных операций.
Известно устройство для перемещения щтучных грузов, содержащее подающий рольганг, приемный рольганг, расположенный под прямым углом к подающему, и перегрузочный механизм с приводными роликами, размещенными параллельно роликам подающего и приемного рольгангов 1.
Недостаток, этого устройства - ненадежная работа в зоне приема (загрузки). Ролики могут прокатываться под изделием, недостаточно сдвигая его, что нарущает ритмичность их подачи на приемный конвейер. Кроме того, устройство не обеспечивает упорядоченную укладку щтучных грузов в ряд на приемный конвейер, необходимую для подачи изделий в рабочую зону промышленного робота для выполнения дальнейщих манипуляционных операций.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство для загрузки конвейера штучными грузами, включающее несущее приспособление, удерживающий
5 упорный механизм, толкающий механизм для подачи грузов на грузокесущие платформы конвейера и схему управления 2. Однако в известном устройстве толкатель со вспомогательными звеньями и приспо10 соблениями имеет громоздкую конструкцию, что снижает надежность работы устройства для загрузки конвейера штучными грузами. Цель изобретения - повыщение надежности работы устройства.
Указанная цель достигается тем, что
толкающий механизм выполнен в виде пневматической пушки, установленной на удерживающем упорном механизме, а несущее приспособление - в виде приводных катков, при этом схема управления выполнена
20 в виде установленного в зоне приводных катков фотоэлектрического датчика подачи сигнала на перемещение удерживающего упорного механизма и конвейера, размещенного на удерживающем упорном механизме датчика контроля наличия груза на приводных катках и контактного механизма, состоящего из установленных за нриводными катками в зоне движения грузонесущих платформ конвейера подпружиненных роликов и взаимодействующего с ними датчика подачи сигнала о наличии платформы на позиции загрузки.
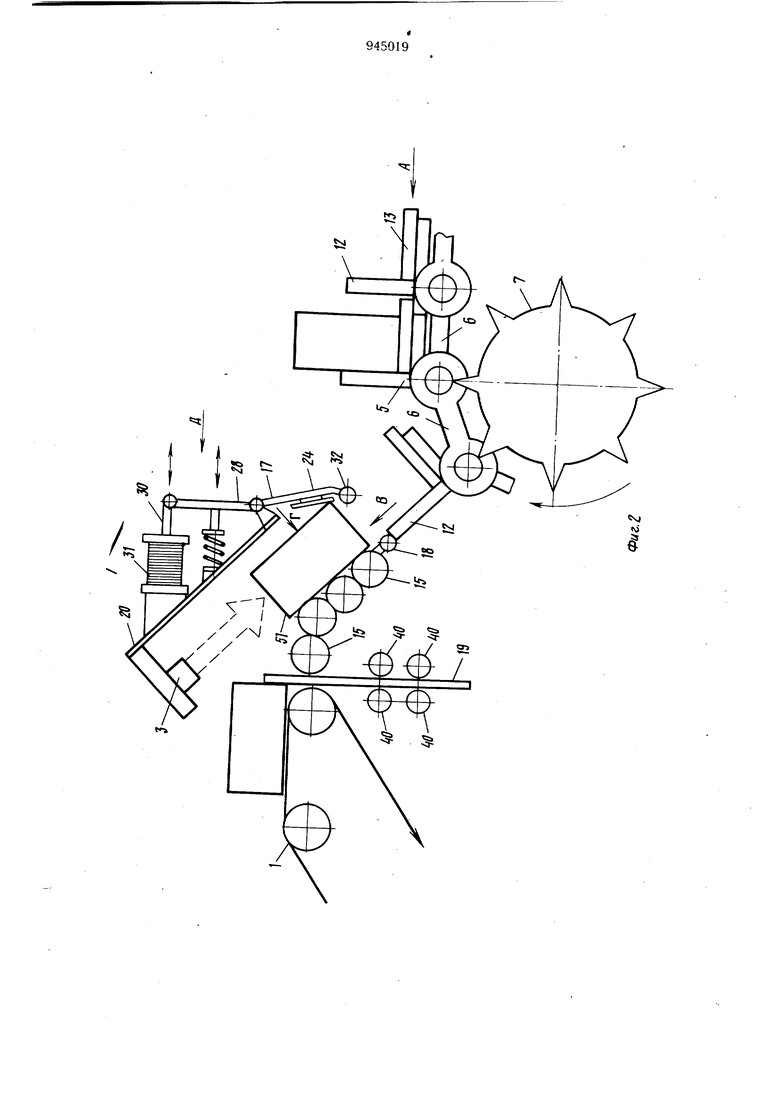
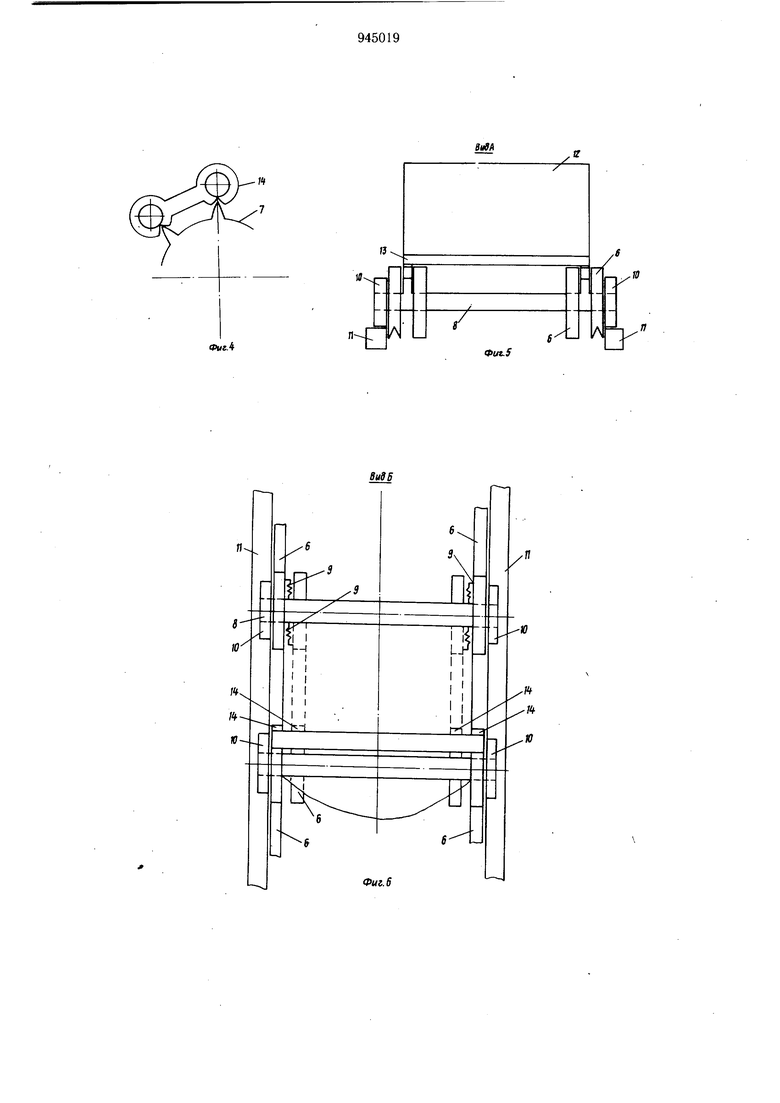
На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2 - основные узлы и элементы устройства и приемного цепного конвейера; на фиг. 3 - приемный конвейер; на фиг. 4 - элем.енты приводной звездочки и звено цепи приемного конвейера; на фиг. 5 - вид А на фиг. 2; на фиг. 6 - вид Б на фиг. 3; на фиг. 7 - вид В на фиг. 2; на фиг. 8 - вид Г на фиг. 2; на фиг. 9 - удерживающий механизм, вид сбоку; на фиг. 10 - вид Д на фиг. 2 (удерживающий упорный механизм); на фиг. 11 - контактный механизм; на фиг. 12 - регулирующая заслонка; на фиг. 13 - схема , пневматической пущки.
Устройство для загрузки состоит из ленточного конвейера 1, перегрузочного устройства 2 с пнев.матической пущкой 3 импульсного действия и приемного цепного конвейера 4, оснащенного грузонесущими платформами 5 (фиг. 3).
Тяговые цепи 6 приемного цепного конвейера 4, перемещ.аемые приводными звездочками 7 (привод не показан), соединены между собой осями 8 и подпружинены со звеньями цепи 6 пружина.ми 9. На концах каждой оси 8 установлены свободно вращающиеся несущие рейки 10, перемещающиеся по направляющим 11. На каждой оси 8 смонтирована грузонесущая платформа 5, оснащенная спинкой 12, перпендикулярной к основанию 13 грузонесущей платформы 5. Причем грузонесущая платформа 5 в рабочей фазе (передвигающая предмет) опирается на поверхности цилиндрических колец 14 смежных звеньев цепи 6 (фиг. 3, 4, 6).
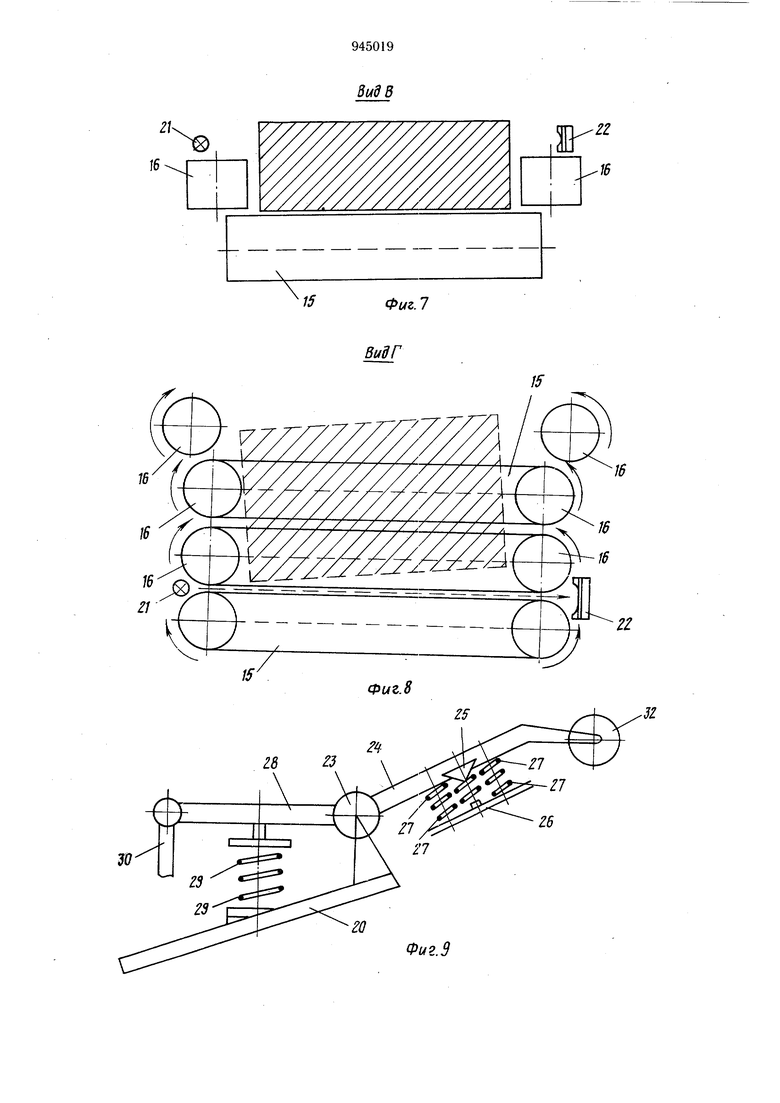
Перегрузочное устройство 2 содержит несущие катки 15, смонтированные в обоймах направляющие ролики 16, удерживающий упорный механизм 1/, контактный механизм 18 и перемещающуюся в вертикальной плоскости регулирующую заслонку 19. На противоположных боковых стенках корпуса 20 перегрузочного устройства 2 установлены источник 21 света и фотоэлемент 22.
Удерживающий упорный механизм 17 представляет собой фигурный двуплечий рычаг, ось 23 которого закреплена на корпусе 20 перегрузочного устройства 2 (фиг. 2). Плечо 24, выполненное в виде листа, оснащено датчиком 25 контроля наличия груза и губкой 26, подпружиненной пружинами 27. Плечо 28, выполненное в виде листа, подпружинено к корпусу 20 пружинами 29 и щарнирно соединено с тягами 30, продолжениями которых являются сердечники
электромагнитов 31. Плечо 24 оснащено роликами 32.
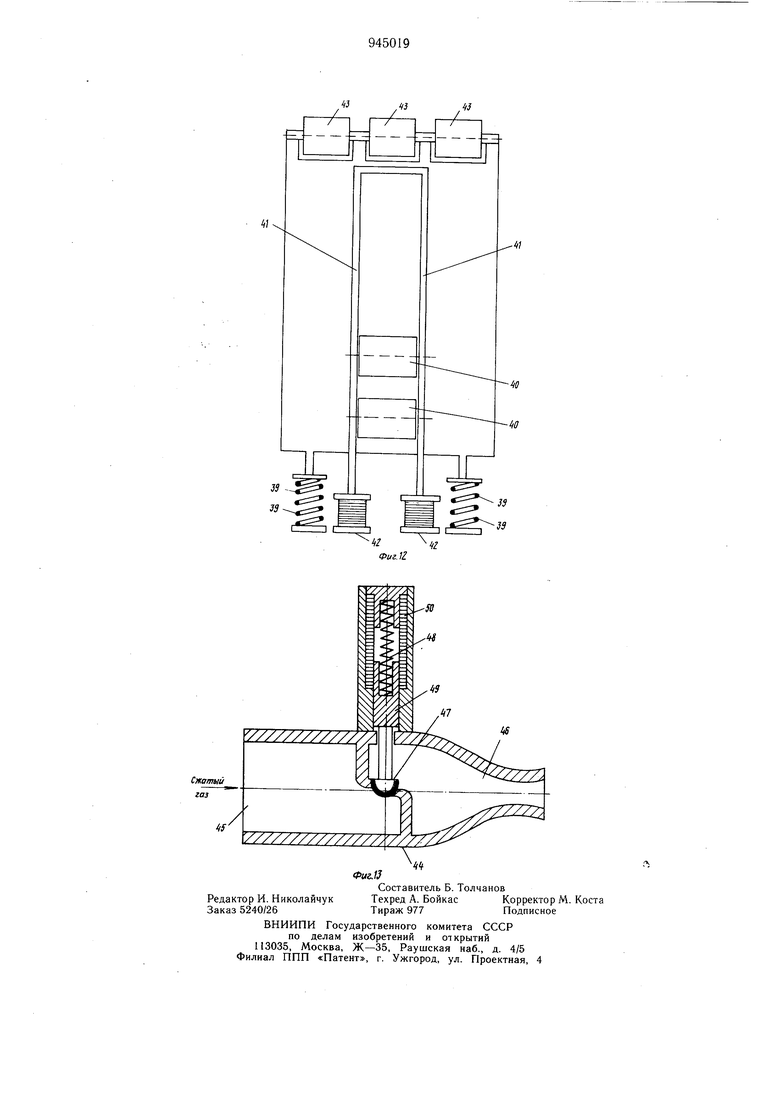
Контактный механизм 18 представляет собой систему роликов 33, ось 34 которых крепится посредством зубьев 35 к основанию корпуса 20 перегрузочного устройства 2 и подпружинена пружинами 36 (фиг. 2 и 11). Зубья 35 размещаются в пазах 37, в дно одного из которых вмонтирован датчик 38 подачи сигнала о наличии платформы на позиции загрузки (фиг. 11). Регулирующая заслонка 19, подпружиненная пружинами 39, в вертикальном положении поддерживается роликами 40, заключенными направляющими 41, продолжения которых являются сердечниками электромагнитов 42. Регулирующая заслонка 19 оснащена роликами 43 (фиг. 2 и 12). Пневматическая пущка 44 импульсного действия состоит из камеры 45, в которую подводится сжатый воздух, сопла 46 и электромагнитного клапана, перекрывающего золотником 47 отверстие между камерой 45 и сопло.м 46. Золотник 47 подпружинен пружиной 48 и перемещается якорем 49 при подаче напряжения в обмотку 50.
Устройство работает следующим образом.
Находясь в перегрузочном устройстве 2, груз 51 под действием непрерывно вращающихся катков 15, образующих наклонную плоскость, давит на губку 26. (На фиг. 7 и 8 транспортируемый предмет обознакм
Q штриховкой). При этом пружины 27 сжимаются и срабатывает датчик 25, сигнал от которого поступает в систему управления конвейерной системы. Причем пружины 29 препятствуют повороту удерживающего упорного механизма 17 вокруг оси 23. Предмет 44, находящийся в перегрузочном устройстве 2, препятствует воздействию луча света от источника 21 на фотоэлемент 22, и об этом также поддается сигнал в систему управления конвейерной системой. Приводные звездочки 7, вращаясь, перемещают цепь 6 посредством закрепления гнездами, расположенными на цилиндрических кольцах 14 звеньев цепи 6 (фиг. 4). Спинка 12 грузонесущей платформы 5, переместивщейся в позицию загрузки приемного конвейера 4, оказывает давление на ролики 33 контактного устройства 18 (фиг. 2 и 11). При этом пружины 36 сжимаются и зубья 35 входят в пазы 37. В результате давления зуба срабатывает датчик 38, сигнал от которого поступает в систему управления конвейерной системой.
Получив сигнал от схемы управления, состоящей из датчиков 25 и 38 и фотоэлемента 22, cifcTeMa управления подает команду остановки на привод звездочек 7 и 5 в то же время срабатывают электромагниты 31, поворачивающие удерживающий механизм посредством тяг 30, и выстреливает струей воздуха пневматическая пущка 3. В результате вращения катков 15 и воздействия направленной струи воздуха груз 51 перемещается по спинке 12 несущей платформы, находящейся в позиции загрузки. Положение спинки 12 грузонесущей платформы устанавливается по радиусу звездочки благодаря гнезду на цилиндрическом кольце 14 звена цепи 6 и пружинам 9, подпружинивающим звенья цепи 6 с осью 8, на которой смонтирована грузонесущая платформа. В течение этой фазы перегрузочного устройства регулирующая заслонка 19, подпружиненная пружинами 39, препятствует движению предмета с подающего конвейера 1 на катки 15 перегрузочного устройства 2. После того, как груз 51, наход$}щийся в перегрузочном устройстве 2, .займет место на грузонесущей платформе, луч света от источника 21 подействует на фотоэлемент 22 и в систему равления поступит сигнал об освобождении перегрузочного устройства 2. По команде от системы управления приводные звездочки 7 продолжают свое вращение и выключаются электромагниты 31, позволяя удерживающему механизму занять исходное положение посредством пружин 29. По этой же команде от системы управления срабатывают электромагниты 31 и устраняют регулирующую заслонку 19 на пути-предмета, находящегося на подающем конвейере 1. Катки 15 и направляющие ролики 16 подают предмет в перегрузочное устройство 2. Как только срабатывает тактильный датчик 25 и фотоэлемент 22 показывает о наличии предмета, управляющая система подает команду о выключении (размагничивании) электромагнитов 42. В результате этого разжимаются пружины 39 и регулирующая заслонка 19 перекрывает путь следующему грузу. Ролики 32, 33 и 43 облегчают перемещение транспортируемого предмета по ходовому пути. Предлагаемое устройство по сравнению с известными обеспечивает возможность ритмичной подачи транспортируемых предметов на приемный конвейер, исключает задержку транспортируемых предметов на несущи.ч катках перегрузочного устройства и повышается производительность конвейерной системы. Эти преимущества обеспечивают упорядоченную укладку штучных грузов в ряд на приемный конвейер, необходи.мую для подачи изделий в рабочую зону промышленного робота для успешного выполнения дальнейщих манипуляционных операций. Формула изобретения Устройство для загрузки конвейера штучными грузами, включающее несущее приспособление, удерживающий упорный механизм, толкающий механизм для подачи грузов на грузонесущие платформы конвейера и схему управления, отличающееся тем, что, с целью повыщения надежности работы устройства, толкающий механизм выполнен в виде пневматической пушки, установленной на удерживающем упорном механизме, а несущее приспособление - в виде приводных катков, при этом схема управления выполнена в виде установленного в зоне приводных катков фотоэлектрического датчика подачи сигнала на перемещение удерживающего упорного механизма и конвейера, размещенного на удерживающем упорном механизме датчика контроля наличия груза На приводных катках и контактного механизма, состоящего из установленных за приводными катками в зоне движения грузонесущих платформ конвейера подпружиненных роликов и взаимодействующего с ними датчика подачи сигнала о наличии платформы на позиции загрузки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 712332, кл. В 65 G 47/52, 1978. 2.Авторское свидетельство СССР № 498229, кл. В 65 G 47/02, 1971 (прототип). .
N
I
)ff.-il IH

| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |
| Устройство для перемещения и загрузки штучных грузов | 1983 |
|
SU1137030A1 |
| Перегрузочное устройство для складов штучных грузов | 1980 |
|
SU981127A1 |
| Подъемно-перегрузочное устройство для штучных грузов | 1979 |
|
SU897662A1 |
| ВЕРТИКАЛЬНАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1995 |
|
RU2083454C1 |
| Устройство для передачи груза | 1990 |
|
SU1733348A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И ВЫГРУЗКИ ГРУЗОВ ИЗ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2333879C1 |
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1049392A1 |
| Тележечный конвейер | 1979 |
|
SU870272A1 |
| Устройство для перегрузки тарных грузов | 1987 |
|
SU1532485A1 |


Вид В 28 /J
Фиг.8 Фиг.8
IQ
272638
3f ВидД
го
ZS -29
/7
,27 -2
37
3f
