ВцдА
СО
I;D
СП
to
фиг. г
Изобретение относится к промьшшен ому Т1)анспорту, точнее к устройст- йам для перемещения штучных грузов в двух взаимно перпендикулярных на- правлениях,.
Цель изобретения - повьшшние надежности работы устройства.
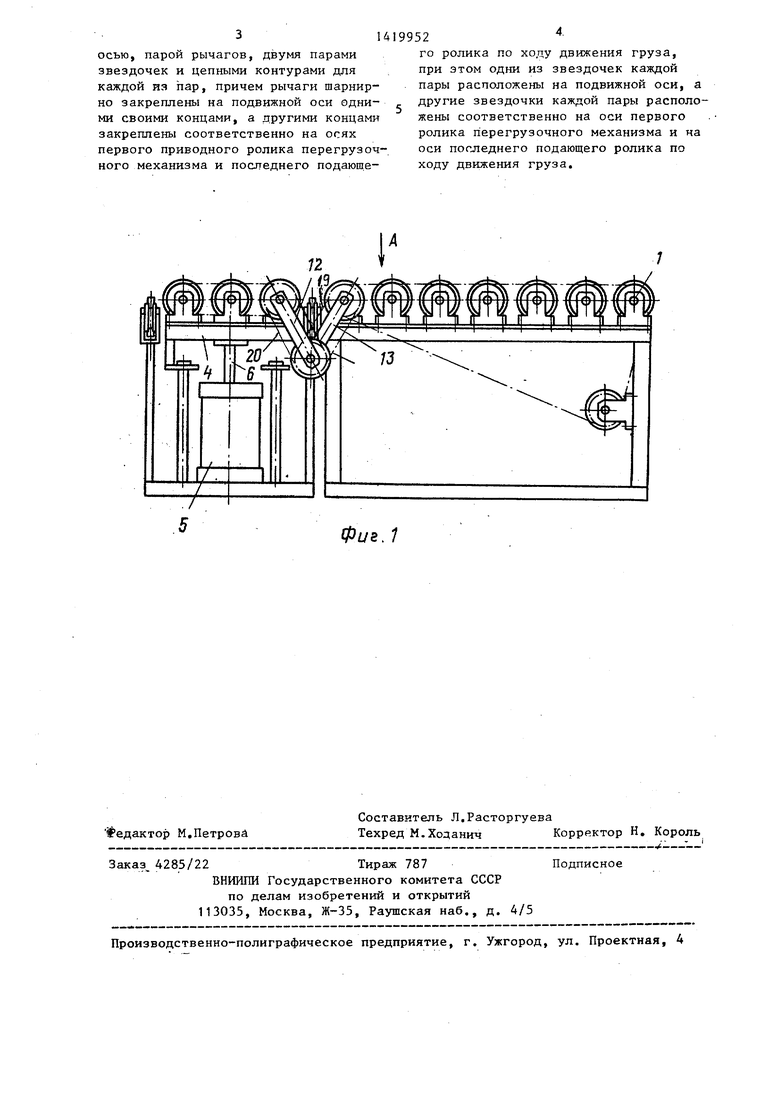
На фиг.1 изображено устройство, I общий вид; на фиг.2 - то же, вид в о I плане,
I Устройство для перемещения штучных I грузов в двух взаимно перпендикуляр™ |-ных направлениях содержит ряд подаю- I щих приводных роликов 1, оси которых 5 установлены на раме, расположенный I перпендикулярно к нему приемный кон вейер 2 и перегрузочный механизм с ; приводными роликами 3, оси которых , установлены на подвижной раме 4, свя- 20 занной с приводом 5 ее вертикального перемещения, шток 6 которого соеди- нен с подвижной рамой 4, На осях 7 и 8 3 перегрузочного мехаш- З ма закреплены звездочки 9э связанные . между собой цепью 10, На осях 8 и 11 соседних роликов соответственно перегрузочного механизма и подающего рольганга шарнирно закреплена одними своими концами пара рычагов 12 и 13 30 и жестко закреплены звездочки 14 и 15 о Другими концами рычаги 12 и 13
шарнирно закреплены на подвижной оси 16, на которой жестко закреплены
звездочки 17 и 18 Каждая пара звез-- -j дочек 15 и 1В и 14 и 17 снабжена цепными контурами 19 и 20, При этом .одни из звездочек 17 и 18 каждой пары расположены на подвижной оси 16, а другие звездочки каждой пары 15 и 40 14 - соответственно на оси 8 первого ролика перегрузочного механизма и на оси 11 последнего подающего ролика по ходу движения груза.
Предлагаемое устройство работает 45 следующим образом.
Ролики 1 подающего рольганга получают вращение от электродвигателя через механическую передачу (не показаны) и груз перемещается в сторону перегрузочного механизма, попадая на его ролики, расположенные на одном уровне с роликами подающего рольганга. Перемещение осуществляется без рывков, а знач дт без перекоса вслед- г ствие кинематической связи роликов подающего рольганга и перегрузочного механизма через рычажго-цепной механизм. После этого управле50
ния отключается привод роликов, вследствие чего груз останавливается на роликах перегрузочного устройства, За эт им последовательно включается вертикальное перемещение щтока 6 вместе с подвижной рамой 4 и расположенным на ней грузом. Груз перемещается вниз до уровня транспортирующих элементов приемного конвейера 2 и ложится на них, после чего системой управления включается привод подающих роликов 1, При этом данный груз транспортируется приемным конвейером к адресату, а подающие ролики 1 транспортируют в зону перегрузки следующий груз,, Подвижная рама 4 с роликами перегрузочного механизма поднимается вверх до совпадения уровня ее ролико с уровнем роликов подающего рольганг« и получает следующий груз. Цикл повт. ряется.
При вертикальных перемещениях подвижной рамы 4 рычаги 12 и 13-свобод- нр поворачиваются относительно осей 8 и 11 соответственно перегрузочного механизма и подающих роликов. Поскольку между звездочками 14, 17 и 18, 15 сохраняется постоянное межцентровое расстояние, то цепные передачи между ними, осуществляемые соответственно цепными контурами 20 и 19, обеспечивают постоянную кинематическую связь с одинаковыми линейными скоростями между подающими роликами и роликами перегрузочного механизма. Осуществление постоянной кинематической связи между додающими роликами и роликами перегрузочного механизма обеспечивает более надежную подачу с требуемой ориентацией грузов с подающих роликов на перегрузочный механизм.
Формула изобретения
Устройство для перемещения штучных грузов в двух взаимно перпендикулярных направлениях, содержащее ряд подающих приводных роликов,оси которых установлены на раме, расположенный перпендикулярно к нему приемный конвейер и перегрузочный механизм с прит водными роликами, оси которых установлены на подвижной раме, связанной с приводом ее вертикального перемещенияj отличающееся тем, что, с целью повьшзения надежности работы устройства, оно снабжено подвижной
31
осью, парой рычагов, двумя парами звездочек и цепными контурами для каждой из пар, причем рычаги шарнир- но закреплены на подвижной оси одними своими концами, а другими концами закреплены соответственно на осях первого приводного ролика перегрузоч ного механизма и последнего подаюше419952
го ролика по хо.цу движения груза, при этом одни из звездочек каждой пары расположены на подвижной оси, а другие звездочки каждой пары расположены соответственно на оси первого ролика перегрузочного механизма и на оси последнего подающего ролика по ходу движения груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки конвейера штучными грузами | 1980 |
|
SU945019A1 |
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Устройство для передачи грузов между перпендикулярно расположенными конвейерами | 1983 |
|
SU1135699A1 |
| Перегрузочное устройство для стеллажных складов | 1983 |
|
SU1146240A1 |
| Подъемно-перегрузочное устройство для штучных грузов | 1981 |
|
SU988716A1 |
| Автоматизированный высотный склад для хранения штучных грузов | 1986 |
|
SU1532451A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1257031A1 |
| Пакеторазборная машина для штучных грузов | 1972 |
|
SU474479A1 |
| Пакетоформирующая машина для штучных грузов | 1972 |
|
SU554196A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
Изобретение относится к промышленному транспорту. Цель изобретения- повьшение надежности работы устройства. На раме установлены оси 11 ряда подающих приводных роликов;(р). Перпендикулярно ряду этих Р расположены приемньй конвейер 2 и перетру- 3очный механизм с приводными Р 3 Оси 7, 8, 11 всех Р установлены на ; подвижной раме, связанной с приводом ее вертикального перемещения. На оси 8 первого Р 3 и на оси 1J последнего подающего по ходу движения груза закреплены одними концами рычаги. Другие концы рычагов шарнирно закреплены на подвижной оси 16, на которой расположены звездочки 17 и 18. Другие звездочки 14 и 15 расположены соответственно на оси 8 первого Р 3 и на оси 1 последнего подающего Р по ходу движения груза. Каждая пара звездочек 15, 18 и 14, 17 имеет цепные контуры. При вертикальных перемещениях подвижной рамы рычаги свободно поворачиваются относительно осей 8 и П. Поскольку между звездочками 14, 17 и 18, 15 сохраняется постоянное, межцентровое расстояние, то цепные передачи между ними обеспечивают постоянную кинематическую связь .с оди- наковыми линейными скоростями между подающими Р и Р 3. 2 ил. i (Л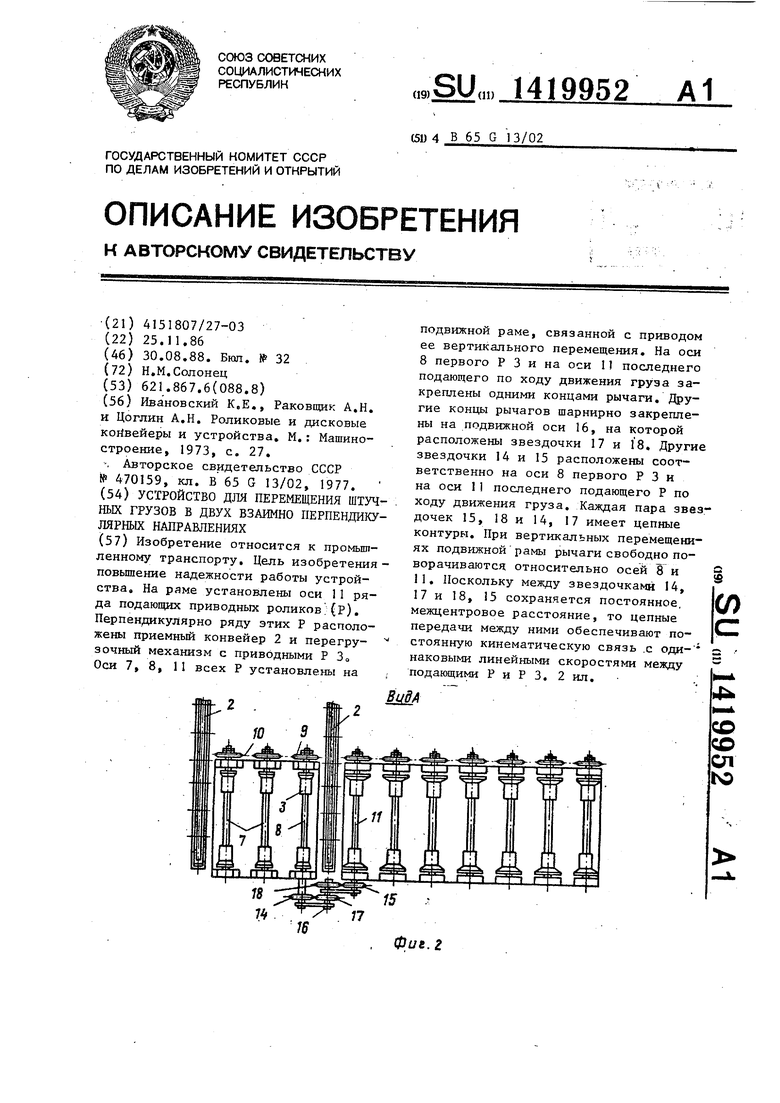
Фи. 1
| Ивановский К.Е, Раковщик А.Н | |||
| и Цоглин А.Н | |||
| Роликовые и дисковые койвейеры и устройства, М.: Машиностроение, 1973, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| -, Авторское свидетельство СССР № 470159, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
