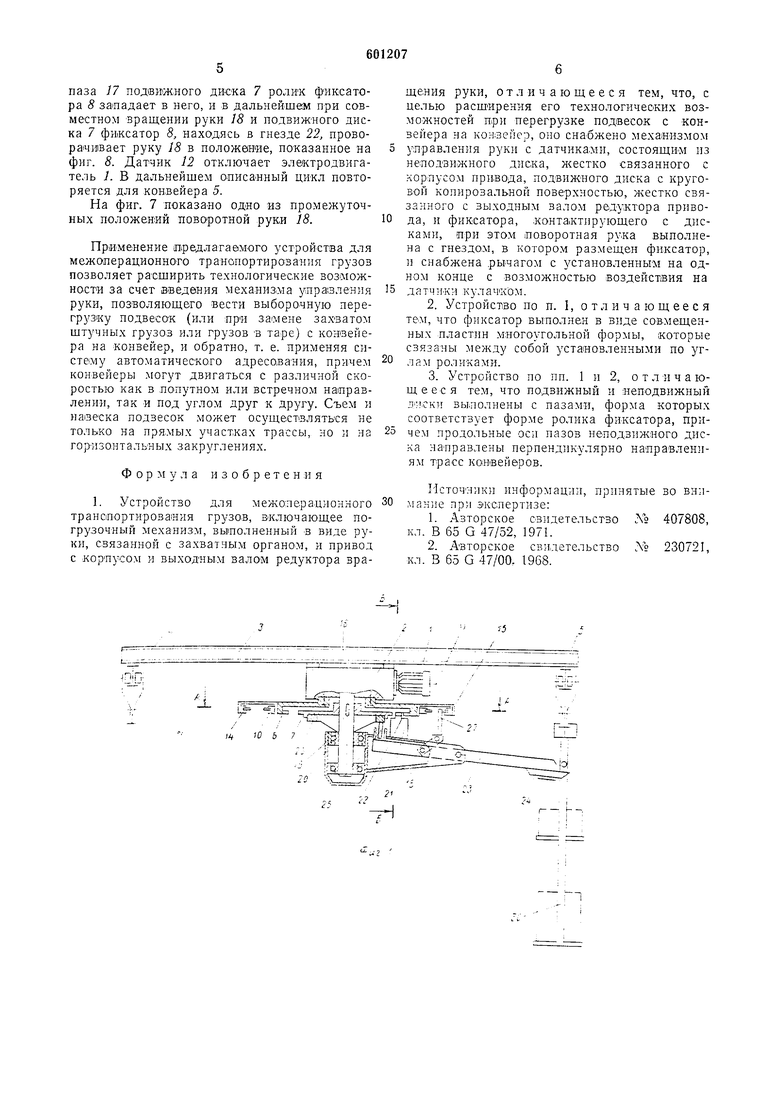
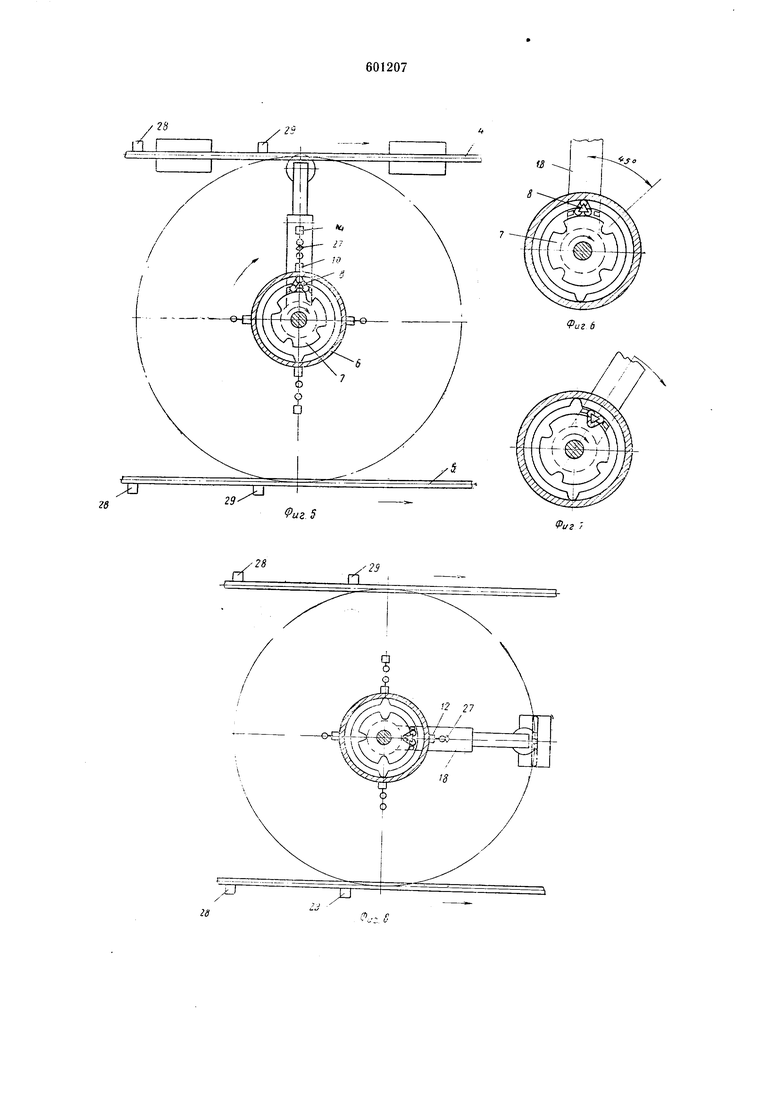
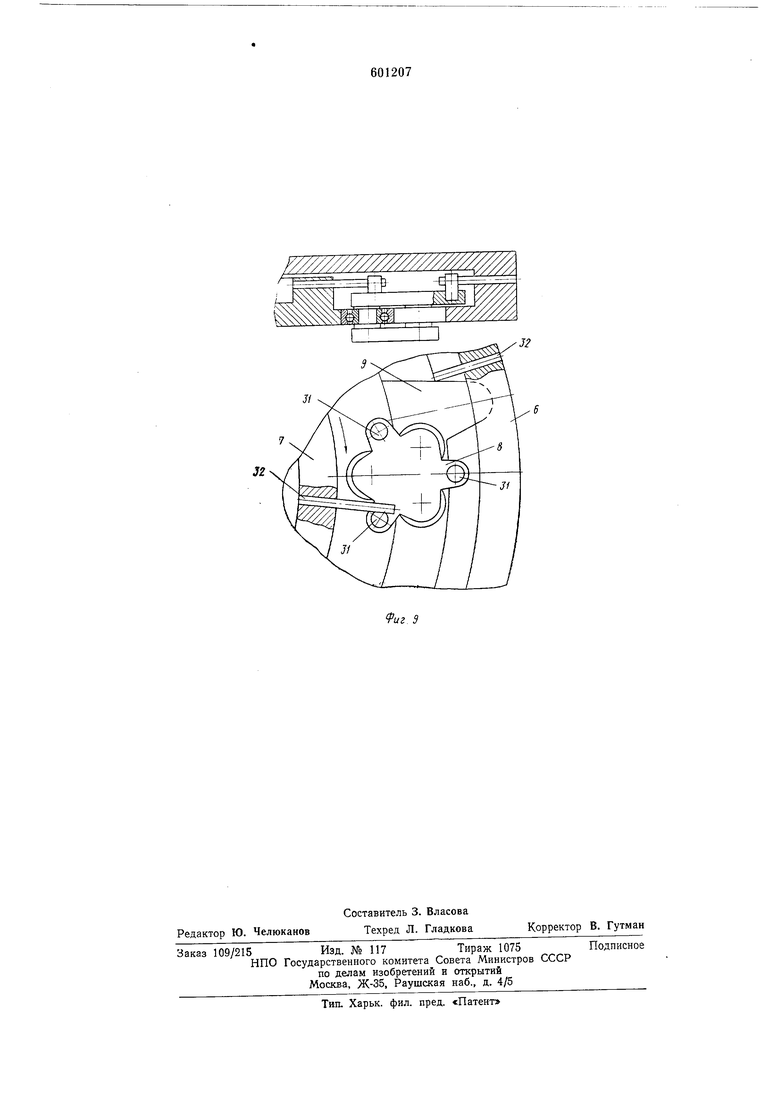
ныи механиЗМ, .выполненный в виае руки с механизмом управления с захватным органом.Мвха:ниЗ:М управления поворотной руки состоит из Неподвижного 6 и подвижйого 7 дисков и |фиксатора 8. Неподвижный диск 6 жестко ари1креп1лен к .корпусу редуктора 2 и имеет аазы 9, которые выполнены с таким взаи1МНЫ1М углс1вы,м расположением, при .котором их продольные оси перпенди,кулярны налразлениям трасс обслуживаемых -конвейеров. На поверхиости нвподв1И1Жного ди1ока 6, в местах ра:ОП|Оложен1Ия лазав 9, а также лод углом 90° к ним прикреплены датчики 10-13, управляющие включением и выключением приводного электродвигателя /. Датчи1К.и 14 и 75 ра1сполол бны На кройштейнах, прикрепленных к неподвижному диску 6 лод угло1м 90° ло отношению к датчикам 12 и 13. Подвижный диск 7 через шпонку жестко связан с выходным вашом 16 редуктора 2 привода и выполнен с наружными пазами 17, располо,женны1ми по его окружности под углам 90° относительно ОДЕН другого (фиг. 2). Между наподвижным 6 и подвижньим 7 дисками ломещен фиксатор 5, расположенный в гнезде руки 18. Фикуса тор 8 выполнен в виде двух пластин многоугольной фор|МЫ, на осях которых, закрепленных по их углам, посажены ролики. В целях ловышения точности зацепления роликов фиксатора 8 с паза.ми 9 и 17 непадвижного 6 и подвижного 7 дисков, фиксатор 8 может быть выполнен, нап1ример, в виде трехзубой шестерни. Форма пазов 9 « 17 неподвижного 6 и подвижного 7 дисков соответствует форме контактного элемента фиксатора 8 (ролика или э-водывентного зуба). Рука /5 жестко связана с корлусом 19 подшипников 20, расположенных на выходном валу 16 редуктора 2, в результате этого она свободно враш;аться относительно этого вала. Рука 18 снабжена ловодком 21, в котором вылолнено гнездо 22 под фиксатор 8. С рукой 18 шарнирно связан захватный орган, выполненный в виде двуплечего рычага 23, один коиец которого шарнирно связан с зах1ватом 24, а другой снабжен осью с установленным на ней роликом 25. Последггай -контактирует с круговым копиром 26, который жестко связан с подвижным диском 7 и выполнен в в-иде кольца с расположенными на его торце выступами и впадинами, чередуюпдимнся через 90°. Впадины расположелы под углом 45° относительно пазов /7 подвижного диска. Рука 18 .снабЖбна также рычагом 27, на конце которого вьлпол.нен кулачок, взаи1МОдействующий с датчи1ка,ми . Рычаг 27 шарнирно связан с рукой 18 и двуплечим рычагом 23. На трассах обоих конвейеров расположены датчики 28 опознавания пустых кареток И считыватели адреса -29 и грузонесущая подвеска 30. С целью гарантированного ввода и вывода фиксатора в пазы дисков механизма управления фиксатор и диски снабжены штифтами 31 и 32, примем штифты фиксатора лерпендикулЯ|рны его плоскости, а штифты дисков перпендикулярны штифтам фиксатора. Устройство для межоперационного транспортирования грузов работает следующим образом. :Когда грузонесущая подвеска находится з исходном положении перегрузочный механизм 30 находится на захвате 24. Рычаг 27 контакт-фует с датчикам 13, отключающим электродзкгатель /. Ролик фиксатора 5 механиз.ма управления руки зацеплен с одним из пазов 17 подвижного диска 7, фиксированного от случайного поворота наличием самотормозящейся червячной передачи в редукторе 2. Таким образом рука 18 оказывается зафиксированной. При подходе к лерегрузочному механизму пустой каренки датчик 28 опоэнавання пустых кареток подает сигнал на включение электродвигателя /. Вместе с выходным валом 16 редуктора 2 начинает вращаться подвижный диск 7, фиксатор 8 заходит в паз 17. Поворачивается рука 18 в лоложение, показанное на фиг. 5. При этом фиксатор 5 западает в лаз 9 неподвижного диака 6. Рычаг 27 руки 18, упираясь в датчик 10, отклк чает вращение электродвигателя 1. В таком фиксированном положении рука принимает лустую каретку, перемещающуюся по конвейеру 4. Как только пустая каретка дойдет до считывателя адреса 29, снова включается электродвигатель привода вращения руки, а В|месте с ним и лодвиж1ного диска 7. Так как рука зафиксирована пазом 9 неподвижного диска 6, то при вращении лодвижного диска 7 происходит обкатывание кругового копира 26 по ролику 25 захватного органа. Под воздействием впадины копировальной поверхности захватный opiraH перегрузочного механизма опускается и навешнвает подвеску на пустую каретку. После этого привод отключается датчиком 10. Расположение лазов 17 подвижного диска 7 и пазов 9 неподвижного диска 6 в момент опускания захватного органа показано на фиг. 6. В этом положении зах1ватный орган находится до тех лор, пока по конвейеру 4 не придет адресованная для перепрузки на конвейер 5 подвеска. Неадресованные подвески, проходя захват 24, свободно посаженный на конце захватного органа, прокручивают его и проходят мимо. При появлении адресованной поп,1зес(ки считыватель адреса 29 подает сигнал на включение электродвигателя привода вращения руки. При вращении подвижного диска захватный орган под действие1м В(ращающегося копира поднимается и снимает аиресованную подвеску с каретки, после чего каретка уходит. При подходе очередного по вращению
паза П подвижного диска 7 ролик ф иксатора 8 западает в него, и в дальнейшем при совместном вращении руки 18 и подвижного диска 7 фи|Ксатор 8, находясь в гнезде 22, провора1чи1вает руку 18 в положение, показанное на фиг. 8. Датчик 12 отключает электродвигатель 1. В дальнейшем описа«ный цикл повторяется для конвейера 5.
На фиг. 7 показано одно из промежуточных положений поворотной руки 18.
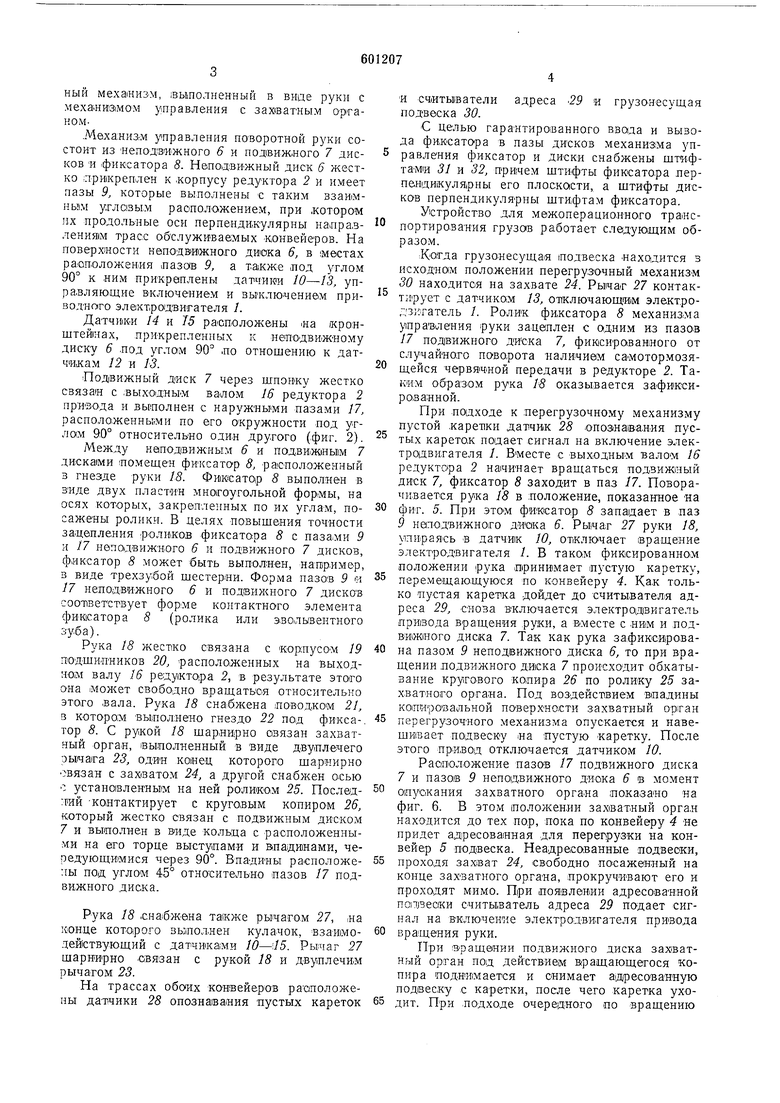
Применение оредлагаемого устройства для межоперациопного транопортировання грузов позволяет расширить технологические возможности за счет введения механизма управления руки, позволяющего вести выборочную перегрузку подвесок (или при заадене захватом штучных грузов или грузов В таре) с коввейера на конвейер, и обратно, т. е. применяя систе;му автоматического адресования, причем конвейеры .могут двигаться с различной скоростью как в попутном или встречном направлении, так и под углом друг к другу. Съем и HaiBecKa подвесок может осуществляться не только на пря.мых участках трассы, но и на горизонтальных закруглениях.
Формула изобретения
1. Устройство для межолерадионного транспортирования грузов, включающее погрузочный механизм, выполненный в виде руки, связанной с захватным органом, и привод с корпусом и выходным валом редуктора вращения руки, отличающееся тем, что, с целью расширения его технологических возможностей п.ри перегрузке подвесок с конвейера на конвейер, оно снабжено механизмом управления руки с датчиками, состоящим из неподвижного диска, жестко связанного с корпусом привода, подвижного диска с круговой копировальной поверхностью, жестко связанного с выходным валом редуктора привода, и фиксатора, .контактирующего с д 1сками, при этом поворотная рука выполнена с гнездом, в котором размещен фиксатор, и снабжена рычагом с установленным на одном конце с возможностью воздействия на датчики кулачком.
2.Устройство по п. 1, отличающееся тем, что фиксатор выполнен в виде совмещенных пластин многоугольной формы, которые связаны между собой зстановленными по углам роликами.
3.Устройство по пп. 1 и 2, о т л и чающееся тем, что подвижный и неподвижный .Ппски выполнены с пазами, форма которых соответствует форме ролика фиксатора, причем продольные оси пазов неподвижного диска направлены перпендикулярно направления.м трасс конвейеров.
Источники информации, принятые во внилгание при экспертизе:
1.Авторское свидетельство Л 407808, кл. В 65 G 47/52, 1971.
2.Авторское свидетельство 230721, кл. В 65 G 47/00. 19G8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Подвесной конвейер | 1990 |
|
SU1722978A2 |
| Манипулятор | 1972 |
|
SU441141A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕРвсгсо:ЗСНАЯ;;:::;';Е:1ш::^ .'ЕКА | 1970 |
|
SU284700A1 |
| Устройство для съема и навешиванияпОдВЕСОК HA пОдВЕСНОй КОНВЕйЕР | 1979 |
|
SU802140A1 |
| Устройство адресования для подвесного конвейера | 1980 |
|
SU874529A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для перегрузкипОдВЕСОК | 1979 |
|
SU810585A1 |
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
А -,
I
17
JS. i.
riz:
12
2В
i
n
аг5
tf
7
Фиг 6
Фиг
jal
