00
4
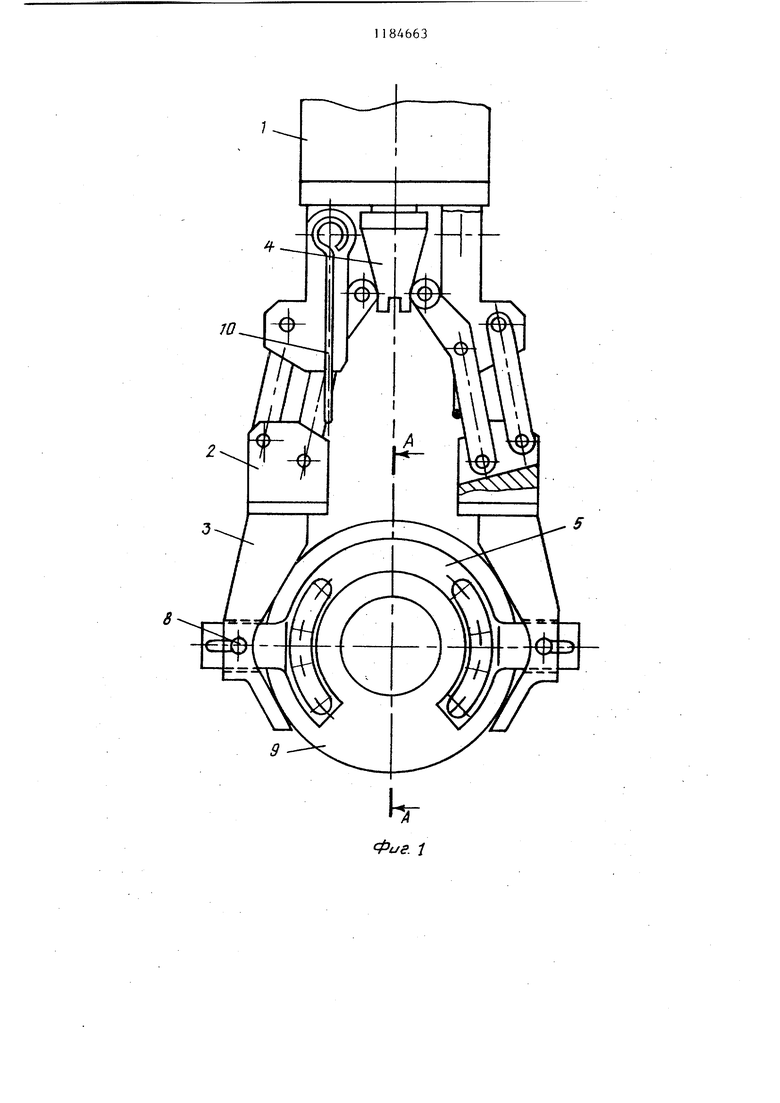
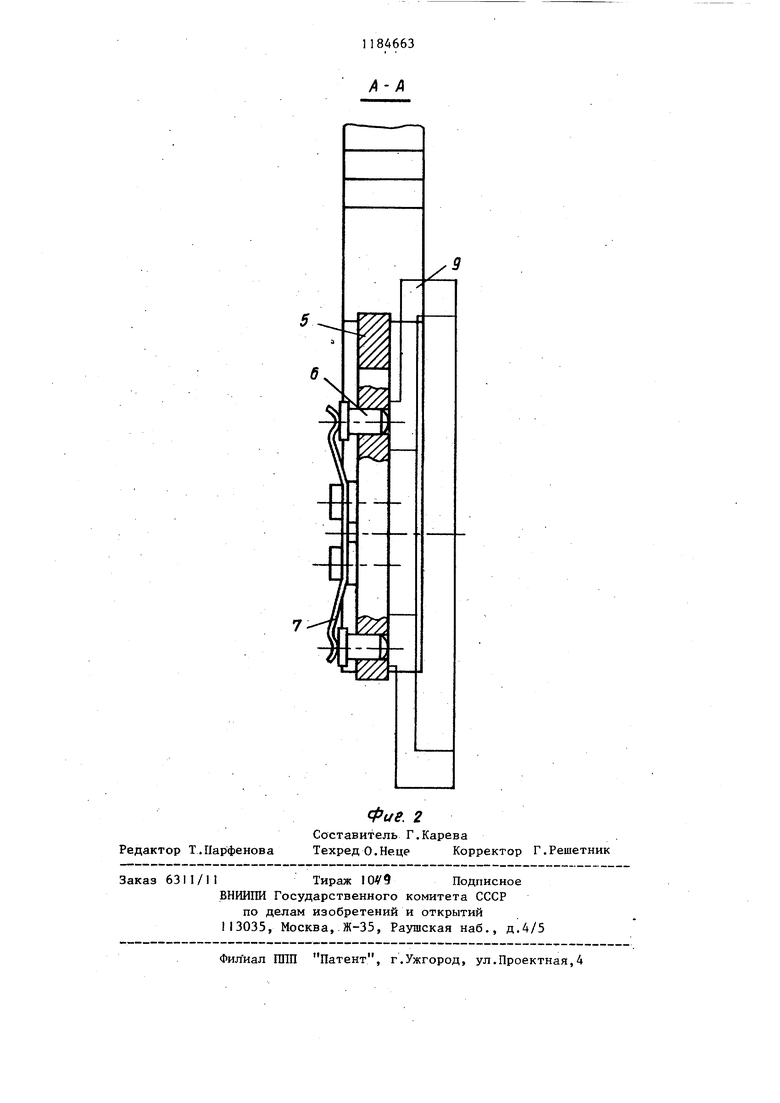
Од О) 00 Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов для обслу живания металлообрабатывающих станк с горизонтальной осью шпинделя. Цель изобретения- упрощение конст рукции, снижение массы схвата промьшшенного робота. На фиг.1 изображен схват, общий вид; на фиг.2 - разрез А-А на фиг.1 Схват промьщшенного робота содер жит корпус 1, шарнирно прикрепленные к нему рычаги 2 -с губками 3, пр вод 4 перемещения рьгчагов с губками пластину 5, по выступам которой на направляющих могут свободно перемещаться губки 3, с установленными на ней досьшателями 6, которые по;:1;жаты пружинами 7. На губках 3 схвата установлены штифты - ограничители 8, перемещающиеся в пазах выступов пластины 5 при движении губок, которые центрируют пластину 5 относительно рабочи поверхностей губок 3 при крайних их положениях. Освобождение детали 9 при возвращении привода в исходное положение осуществляет пружина 10, закрепленная на корпусе 1 схвата, разведением рычагов 2 и губок 3. Схват работает следующим образом. Перед тем как взять деталь губками схват подводится к детали 9 со осно ей таким обраяом, что подпру632жиненные досьшателями 6, упираясь в торцовую поверхность, детали перемещаются в отверстиях пластины 5 и взводят пружины 7, деталь 9 при этом своей торцовой поверхностью поджимается к базовой поверхности загрузочного устройства; привод 4, перемещаясь, через рычаги 2 сводит губки 3, зажимая деталь, при этом пластина 5 с подпружиненными досьшателями 6 остается неподвижной и поджатой к торцовой поверхности детали 9, а губки своими направляющими скользят по выступам пластины 5; схват с зажатой деталью подводится к патрону станка таким образом, чтобы между торцом детали и торцом патрона оставался небольшой зазор, а зазор между рабочей поверхностью кулачков и поверхностью детали 9 был достаточным, чтобы компенсировать несоостность этих поверхностей; схват разжимается, деталь освобождается и подпружиненными досьшателями 6 досылается до торца патрона, компенсируя неточность ориентации схвата относительно патрона станка; кулачки патр.она сходятся, и деталь фиксируется в патроне станка. Схват промышленного робота позволяет упростить конструкцию, уменьшить массы, что очень важно при загрузке в станок деталей из легких сплавов и небольшой массы, когда целесообразно использование микророботов.
ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват промышленного робота | 1984 |
|
SU1255426A1 |
| Схват манипулятора | 1984 |
|
SU1301696A1 |
| Схват промышленного робота | 1979 |
|
SU776914A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Схват промышленного робота | 1987 |
|
SU1498609A1 |
СХВАТ, содержащий корпус, шарнирно установленные на нем ры- чаги с губками, привод и устройство досылки деталей, отличающийс я тем, что, с целью упрощения конструкции, устройство досылки деталей выполнено в виде пластины с отверстиями и двумя прямолинейными выступами, последние размещены в направляющих пазах, выполненных в губках, причем в выступах выполнены пазы, в которых установлены дополнительно введеные штифты-ограничители, закрепленные на губках, а в отверстиях пластины размещены подпружиненные досылатели.
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
