Датчики 3 устанавливаются на подвесках средних колес многоопориой подвижной платформы (с целью уменьшения влияния отрыва колес от грунта) и на всех колесах, если подвижная платформа двухосная. В качестве датчнков хода подвески могут быть нрименены, например, стандартные вращающиеся трансформаторы типа 5 МВТ пли сельсины типа БС-7.
Датчики 4 определяют деформацию эластичных колес Агг через ход соответствующей подвески и нормальное усилие на данном колесе Nin (Ап)- Конструктивно датчик деформации может быть выполнен в виде двух последовательно соединенных блоков нелинейностей, один из которых воснроизводит Знругую характеристику подвески, а другой - эластичного колеса. В качестве таких блоков могут быть использованы, например, стандартные вставки функцнональных преобразователей (ВФП), входящие в комплект набора блоков нелинейности сернн (НБН-1).
Датчик 5 пути служит для измерения нройденного расстояния и может быть вынолнен, например, в виде свободно катящегося колеса со счетчиком оборотов.
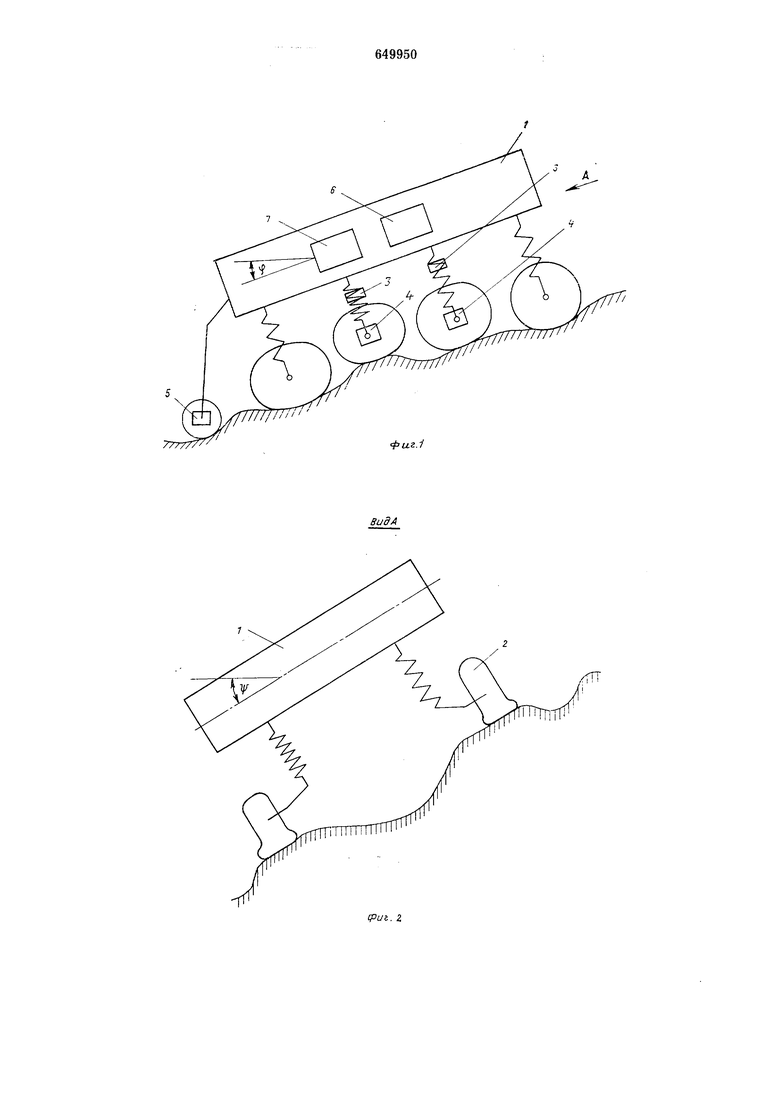
Датчик 6 горизонта по крену и датчик 7 горизонта по дифференту предусмотрены для измерения текущих углов наклона подвижной платформы в поперечной и продольной плоскостях. В качестве этих датчиков может быть применен датчик для измерения угловых перемещений тина ДК-6МТ или гироскоп, спабженный маятниковой коррекцией.
Интегратор 8 определяет 1;ысоты (координаты) рельефа местности под колесами подвижной илатформы правого, а также левого бортов и может быть выполнен в виде катодного повторителя с переменной емкостью.
Автоматический измеритель-преобразователь 9 определяет перепады высот неровностей рельефа под колесами подвижпой платформы в вертикально-продольной и вертикально-поперечной нлоскостях в темпе движения подвижной платформы.
Регнстрирующее устройство 10 предназначено для регистрации координат профнля местности под колесами иравого и левого бортов, а также перепада рельефа поверхноети между правым и левым борталш. Регистрирующее устройство связано с иптеграторамн 8, автоматическим измерителемпреобразователем 9 и датчиком 5 пути.
Деформация подвесок А/г,-, крен -ф, дифферент ф измеряются непосредственно датчиками 3, 6, 7, установленными на подвижной платформе, а деформация эластичных колес - датчиком 4.
Работает устройство для измерения рельефа следующим образом.
При двилсении подвижной платформы по местности сигналы с первых выходов датчиков 3 хода подвески поступают на входы соответствующих датчиков 4 деформации эластпчиого колеса. В датчиках 4 вначале сигиал с датчиков хода подвески воздействует на вход нервого блока нелинейностей, воспроизводящего упругую характеристику эластичного колеса, Тогда нри данном значении деформации подвески А/г,-о на выходе первого блока иелипейностей появляется
сигнал (A/ijo), пропорциональный величине нормального усилия, действующего на колесо (фиг. 4). Сигнал Fni (A/Zjo) подается на вход второго блока нелинейностей, воспронзводящего упругую характеристику
эластичного колеса. Тогда при данном значении усилия Fni (A/Zjo) с выхода этого блока, а следовательно, и с выхода датчика 4 деформации, снимается сигнал, нропорциональный деформации эластичного колеса
Аг,-о (фиг. 5).
Сигналы с выходов датчиков деформации эластичного колеса и вторых выходов датчиков хода подвески, а также с выходов датчиков горизонта по крену и дефференту
поступают в автоматический измерительпреобразователь 9. В этом устройстве происходит вычисление перепадов высот неровностей рельефа между передними и задними колесами и между бортами. Сигналы
с выходов автоматического измерителя-преобразователя 9 и датчика 5 иути подаются в интегратор 8. В интеграторе 8 происходит вычисление высот рельефа местности между бортами. Сигналы с выходов интегратора,
датчика пути и автоматического измерителя-преобразователя проходят на регулирующее устройство 10, в котором неречисленлые параметры записываются на чувствительную нленку.
Формула изобретения
Устройство для измерения рельефа, содержащее подвижную платформу с эластичиыми колесами, датчик горизонта по крену, датчик хода подвески, автоматический измеритель-преобразователь, к входам которого подключены датчик хода нодвески и датчик
горизоита по дифференту, а выход подключен к интегратору, соединенному с датчиком пути, отличающееся тем, что, с целью новыщения точности измерения рельефа, оно снабжено датчиком деформации эластичного колеса, вход которого связан с датчиком хода подвески, а выход параллельно с выходом датчика горизонта по крену соединен с автоматическим измерителемнреобразователем.
Источники информации,
принятые во внимание при экспертизе
1.Передвижная лаборатория на Луне, Луноход-1. М., «Наука, с. 80-81.
2.Авторское свидетельство СССР № 487299, кл. G 01С 7/04, 1973.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Устройство для измерения профиля местности | 1986 |
|
SU1483259A1 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |

k:.
if иг ч
