1
Изобретение относится к информационным системам об окружающих условиях эксплуатации транспортных машин, может быть использовано для измерения рельефа местности в процессе движения этих машин.
По основному авт. св. № 735918 известно устройство для измерения рельефа местности, включающее в себя подвижную платформу с эластичными колесами, измеритель-преобразователь, выход которого соединен с датчиком пути через интегратор, а на входы.подключены выходы датчиков деформации-эластичного колеса, горизонта по крену и дифференту и один из выходов датчика хода подвески, другой выход которого связан со входом датчика деформации эластичного колеса, датчики вертикальных ускорений и усилий подвески и сумматор, причем датчик усилий подвески и сумматор последовательно включены между датчиком хода подвески и датчиком деформации эластичного колеса, датчик вертикального ускорения автономно подключен к одному из входов сумматора. Указанное устройство измеряет- рельеф местности с учетом деформации эластичного колеса как в
вертикально-продольной, так и в вер тикально-поперечной плоскостях 1.
Однако датчик деформации эластичного колеса измеряет деформацию солеса, обусловленную только инерционной силой,-приложенной к центру тяжести колеса, и нагрузкой, которая передается на колесо от подвижной платформы через упругую
подвеску, т.е. через рессору. Однако, если в подвеске подвижной платформы имеется еще и амортизатор, то кроме перечисленных выше сил на
15 колесо будет действовать еще и усилие от амортизатора, связанного с колесом. Величина усилия в амортизаторе зависит от скорости движения подвижной платформы, ее конструктивных параметров и скорости деформации подвески. Так как с целью повышения скорости движения практически все современные машины снабжаются амортизаторами, то при движении по
25 пересеченной местности неизбежно будут возникать усилия в амортизаторах величина которых может оказат1 ся соизмеримой с усилиями, возникающими в рессорах. Поэтому измерение рельефа с помощью известного устройства
неизбежно будет ,производиться с погрешностью .
Цель изобретения - повышение точности измерения рельефа.
Эта цель достигается тем, что устройство снабжено датчиком усилия в амортизаторе, подключенным выхо дом к одному из входов сумматора, и дополнительным интегратором, вход котсчрого соединен с выходом датчика вертикальных ускорений, а выход со входом датчика усилия в амортизаторе .
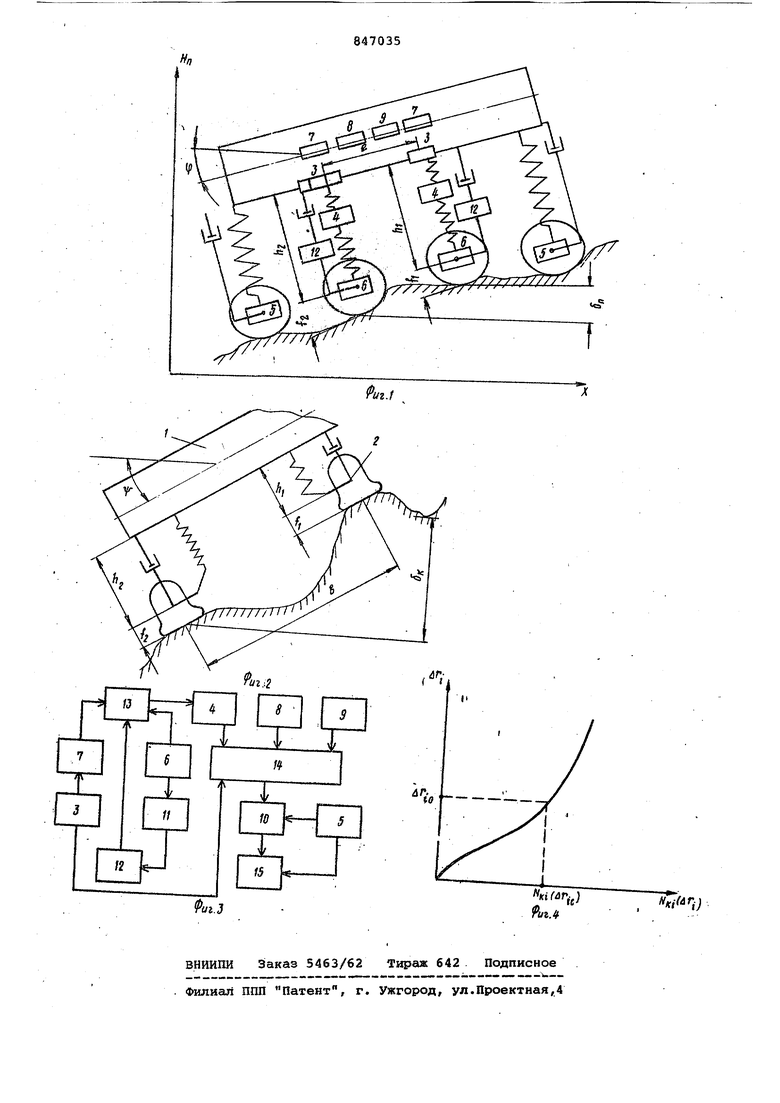
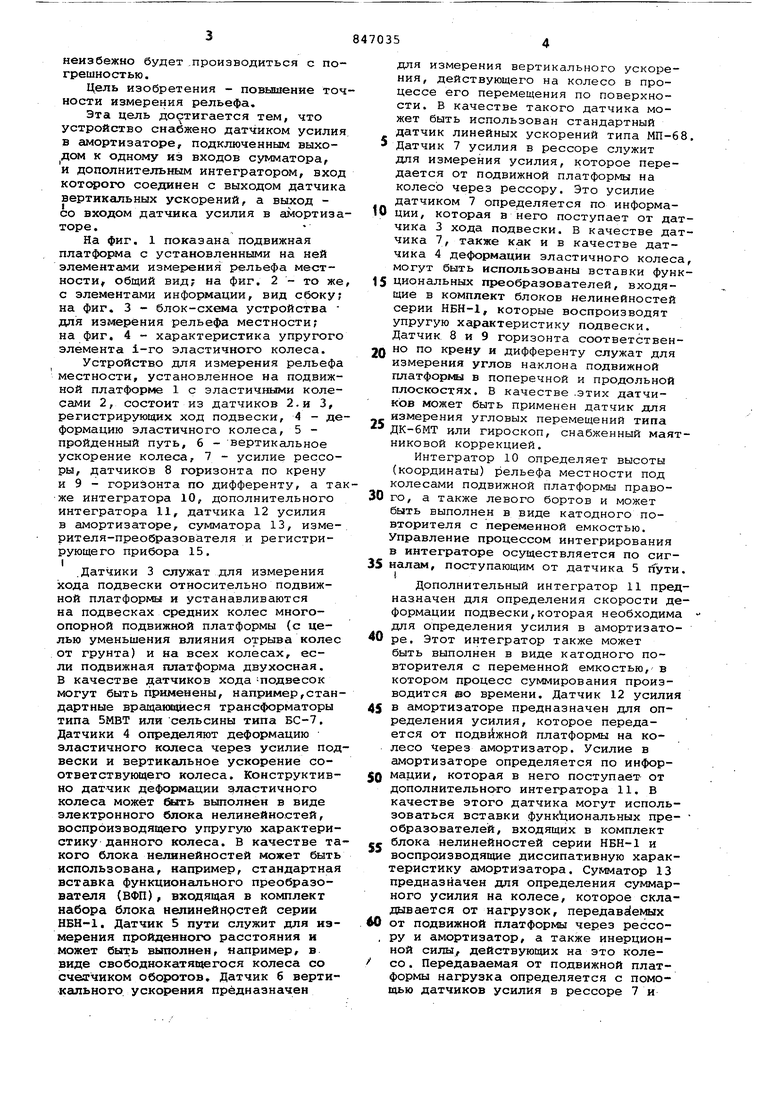
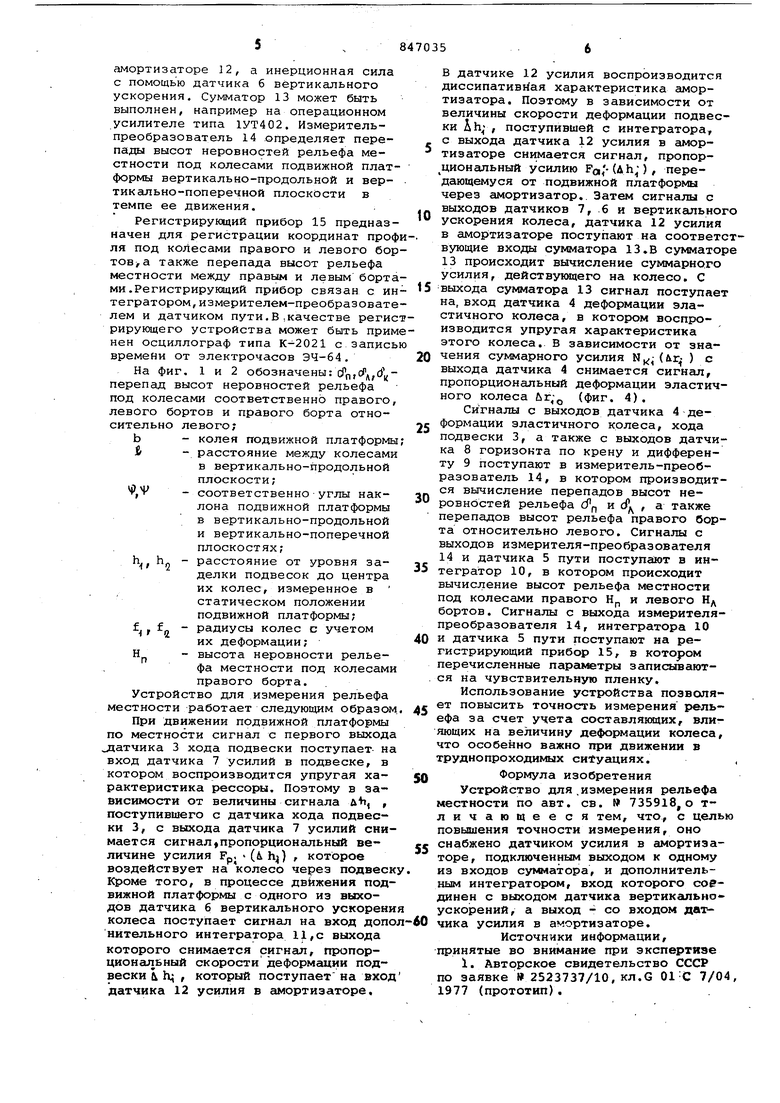
На фиг. 1 показана подвижная платформа с установленными на ней элементами измерения рельефа местности общий вид; на фиг. 2 - то же с элементами информации, вид сбоку; на фиг. 3 - блок-схема устройства для измерения рельефа местности; на фиг. 4 - характеристика упругого элемента i-ro эластичного колеса.
Устройство для измерения рельефа местности, установленное на подвижной платформе 1 с эластичными колесами 2, состоит из датчиков 2.и 3, регистрирующих ход подвески, 4 - деформацию эластичного колеса, 5 пройденный путь, 6 - вертикальное ускорение колеса, 7 - усилие рессоры, датчиков 8 горизонта по крену и 9 - горизонта по дифференту, а таже интегратора 10, дополнительного интегратора 11, датчика 12 усилия в амортизаторе, сумматора 13, измерителя-преобразователя и регистрирующе го прибора 15,
.Датчики 3 служат для измерения хода подвески относительно подвижной платформы и устанавливаются на подвесках средних колес многоопорной подвижной платформы (с целью уменьшения влияния отрыва колес от грунта) и на всех колесах, если подвижная платформа двухосная. В качестве датчиков хода -подвесок могут быть применены, например,стандартные вращаияциеся трансформаторы типа 5МВТ или сельсины типа БС-7, Датчики 4 определяют деформацию эластичного колеса через усилие подвески и вертикальное ускорение соответствующего колеса. Конструктивно датчик деформации эластичного колеса может бtгтъ выполнен в виде электронного блока нелинейностей, воспроизводящего упругую характеристику данного колеса. В качестве такого блока нелянейностей может быть использована, например, стандартная вставка функционального преобразователя (ВФП), входящая в комплект набора блока нелинейнрстей серии НВН-1. Датчик 5 пути служит для измерения пройденного расстояния и может быть выполнен, например, в виде свободнокатягцегося колеса со счеягчиком оборотов. Датчик 6 вертикального ускорения предназначен
для измерения вертикального ускорения, действующего на колесо в процессе его перемещения по поверхности. В качестве такого датчика может быть использован стандартный датчик линейных ускорений типа МП-68. 5 Датчик 7 усилия в рессоре служит для измерения усилия, которое передается от подвижной платформы на колесо через рессору. Это усилие датчиком 7 определяется по информации, которая в него поступает от датчика 3 хода подвески. В качестве датчика 7, также как и в качестве датчика 4 деформации эластичного колеса, могут быть использованы вставки функ 5 циональных преобразователей, входящие в комплект блоков нелинейностей серии НБН-1, которые воспроизводят упругую характеристику подвески. Датчик 8 и 9 горизонта соответственQ но по крену и дифференту служат для измерения углов наклона подвижной платформы в поперечной и продольной плоскостях. Б качестве .этих датчиков может быть применен датчик для измерения угловых перемещений типа ДК-6МТ или гироскоп, снабженный маятниковой коррекцией.
Интегратор 10 определяет высоты (координаты) рельефа местности под колесами подвижной платформы правого, а также левого бортов и может быть выполнен в виде катодного повторителя с переменной емкостью. Управление процессом интегрирования в интеграторе осуществляется по сигналам, поступающим от датчика 5 пути. I
Дополнительный интегратор 11 предназначен для определения скорости деформации подвески,которая необходима для определения усилия в амортизаторе. Этот интегратор также может быть выполнен в виде катодного повторителя с переменной емкостью, в котором процесс суммирования производится дао времени. Датчик 12 усилия
5 в амортизаторе предназначен для определения усилия, которое передается от подвижной платформы на колесо через амортизатор. Усилие в амортизаторе определяется по инфорQ мадии, которая в него поступает от дополнительного интегратора 11. В качестве этого датчика могут использоваться вставки функциональных пре- образователей, входящих в комплект
f блока нелинейностей серии НБН-1 и воспроизводящие диссипативную характеристику амортизатора. Сумматор 13 предназначен для определения суммарного усилия на колесе, которое складывается от нагрузок, передаваемых
0 от подвижной платформы через рессо, ру и амортизатор, а также инерционной силы, действующих на это колесо. Передаваемая от подвижной платформы нагрузка определяется с помощью датчиков усилия в рессоре 7 и амортизаторе 12, а инерционная сила с помощью датчика б вертикального ускорения. Сумматор 13 может быть выполнен, например на операционном усилителе типа 1УТ402. Измерительпреобразователь 14 определяет перепада) высот неровностей рельефа местности под колесами подвижной плат формы вертикально-продольной и вертикально-поперечной плоскости в темпе ее движения. Регистрирующий прибор 15 предназначен для регистрации координат проф ля под колесами правого и левого бор тов а также перепада высот рельефа местности между правым и левым борта ми. Регистр ирукдций прибор связан с ин тегратором, измерителем-преобразовате лем и датчиком пути.В :качестве регис рирующего устройства может быть прим нен осциллограф типа К-2021 с запись времени от электрочасов ЭЧ-64. На фиг. 1 и 2 обозначены: сГр,сд,сГ| перепад высот неровностей рельефа под колесами соответственно правого левого бортов и правого борта относительно левого; колея подвижной платформы расстояние между колесами в вертикально-продольной плоскости; соответственноуглы наклона подвижной платформы в вертикально-продольной и вертикально-поперечной плоскостях; расстояние от уровня заделки подвесок до центра их колес, измеренное в статическом положении подвижной платформы; радиусы колес с учетом их деформации; высота неровности рельефа местности под колесами правого борта. Устройство для измерения рельефа местности работает следующим образом При движении подвижной платформы по местности сигнал с первого выход датчика 3 хода подвески поступает- н вход датчика 7 усилий в подвеске, в котором воспроизводится упругая характеристика рессоры. Поэтому в зависимости от величины сигнала й, , поступившего с датчика хода подвески 3, с выхода датчика 7 усилий сни мается сигнал пропорциональный величине усилия Fp. (л h) , которое воздействует на колесо через подвес Кроме того, в процессе движения под вижной платформы с одного из выходов датчика б вертикального ускорен колеса поступает сигнал на вход доп нительного интегратора lj,c выхода которого снимается сигнал, пропорциональный скорости деформации подвески Ix; , который поступает на вход датчика 12 усилия в амортизаторе. в датчике 12 усилия воспроизводится диссипатив ая характеристика амортизатора. Поэтому в зависимости от величины скорости деформации подвески Ah; , поступившей с интегратора, с выхода датчика 12 усилия в амортизаторе снимается сигнал, пропорциональный усилию FO,- (Д ) , передающемуся от подвижной платформы через амортизатор. Затем сигналы с выходов датчиков 7, 6 и вертикального ускорения колеса, датчика 12 усилия в амортизаторе поступают на соответствующие входы сумматора 13.В сумматоре 13происходит вычисление суммарного усилия, действукяцего на колесо. С выхода cyNOTaxopa 13 сигнал поступает на, вход датчика 4 деформации эластичного колеса, в котором воспроизводится упругая характеристика этого колеса., в зависимости от значения суммарного усилия N,,- ( ) с выхода датчика 4 снимается сигнал, пропорциональный деформации эластичного колеса Ьг; (фиг. 4). Сигналы с выходов датчика 4 - деформации эластичного колеса, хода подвески 3, а также с выходов датчика 8 горизонта по крену и дифференту 9 поступают в измеритель-преобразователь 14, в котором производится вычисление перепадов высот неровностей рельефа сЯ, и (Д , а также перепадов высот рельефа правого борта относительно левого. Сигналы с выходов измерителя-преобразователя 14и датчика 5 пути поступают в интегратор 10, в котором происходит вычисление высот рельефа местности под колесами правого Нр и левого Нд бортов. Сигналы с выхода измерителяпреобразователя 14, интегратора 10 и датчика 5 пути поступают на регистрирующий прибор 15, в котором перечисленные параметры записываются на чувствительную пленку. Использование устройства позволяет повысить точность измерения рельефа за счет учета составляющих, влияющих на величину деформации колеса, что особенно важно при движении в труднопроходимых ситуациях. Формула изобретения Устройство для.измерения рельефа местности по авт. св. 735918, о тличающееся тем, что, с целью повышения точности измерения, оно снабжено датчиком усилия в амортизаторе, подключенным выходом к одному из входов сумматора, и дополнительHbw интегратором, вход которого соединен с выходом датчика вертикальноускорений, а выход - со входом датчика усилия в амортизаторе. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке №2523737/10, кл.С 01 С 7/04, 1977 (прототип).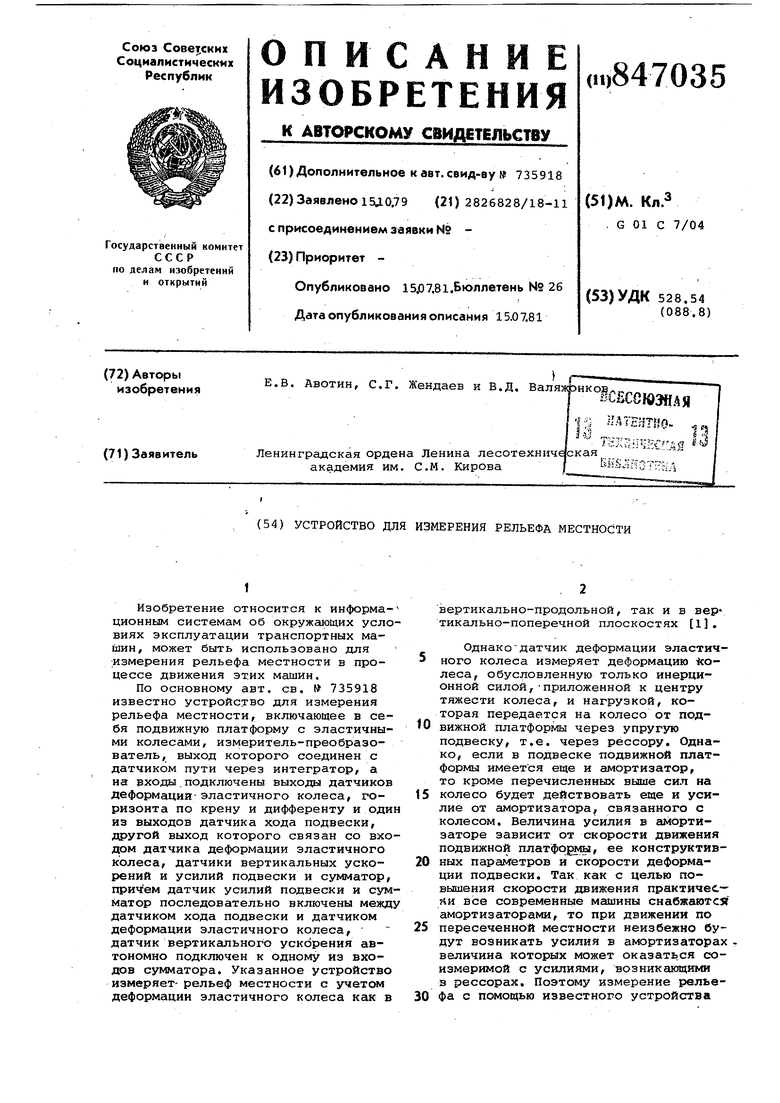
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для измерения профиля местности | 1986 |
|
SU1483259A1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для предотвращения опрокидывания транспортного средства | 1976 |
|
SU770857A1 |
| Способ определения динамического взаимодействия транспортного средства с опорной поверхностью и устройство для его осуществления | 1988 |
|
SU1622794A1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| БОЕВАЯ МАШИНА ДЕСАНТА | 2001 |
|
RU2223460C2 |