Фиг. Ц
Изобретение относится к системам для измерения профиля или высот местности с помощью транспортных средств, движущихся по этой местности и может быть использовано при измерении микропрофилей трасс перед проведением на них испытаний по исследованию плавности хода и вибронагру- женности транспортных систем.
Цель изобретения - повышение точности измерений рельефа.
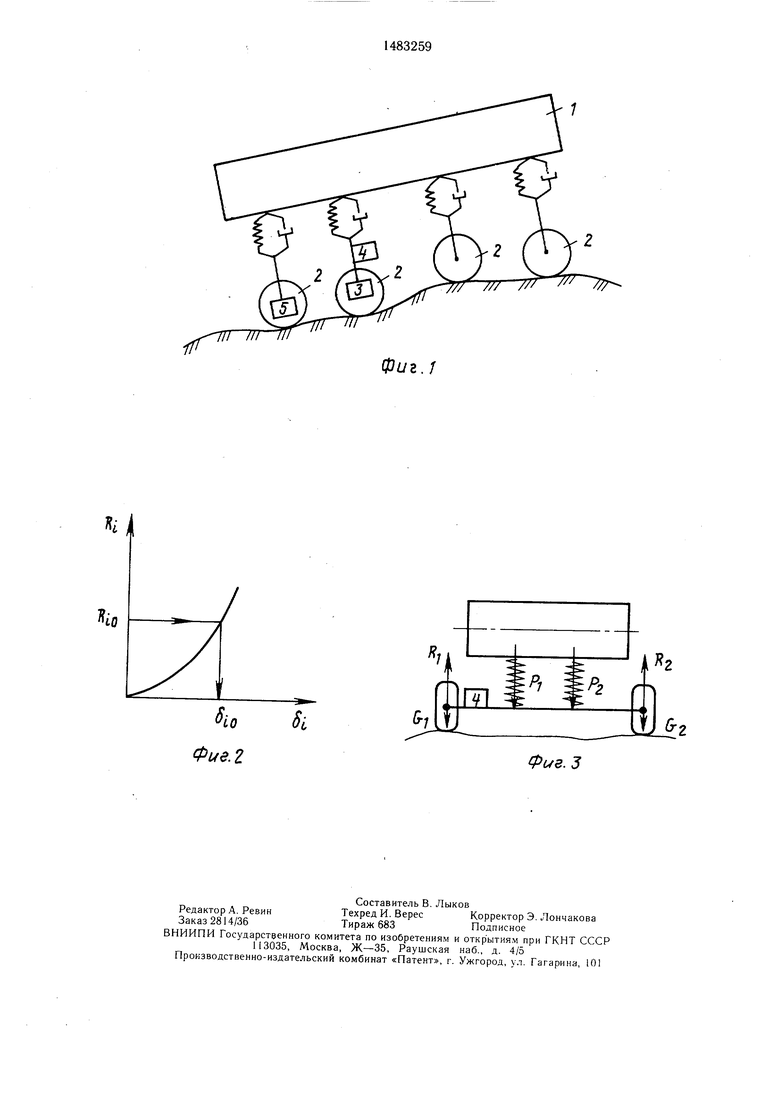
На фиг. 1 показана подвижная платформа с установленными на ней элементами устройства, общий вид; на фиг. 2 - упругая характеристика эластичного колеса; на фиг. 3 - схема действия сил в случае зависимой подвески колес; на фиг. 4 - блок- схема устройства.
Устройство для измерения профиля местности, установленное на подвижной платформе 1 с эластичными колесами 2, содержит датчики 3-6, регистрирующие соответственно вертикальное ускорение оси эластичного колеса, усилие, передаваемое на ось эластичного колеса со стороны платформы через подвеску (при зависимой подвеске также со стороны подвески и колеса противоположного борта), пройденный путь и деформацию эластичного колеса, сумматор 7, дополнительный сумматор 8, блок 9 интегрирования и регистратор 10.
Измерения основаны на том, что высота Н профиля под колесом отличается от величины вертикального смещения YK колеса на величину деформации колеса: H Y + S.
Устройство работает следующим образом.
При движении платформы сигнал с одного из выходов датчика 3 ускорения оси колеса поступает на вход блока 9 интегрирования с выхода которого снимается сигнал, пропорциональный перемещению Yx оси колеса. Блок 9 интегрирования может быть выполнен в виде двух последовательно соединенных интеграторов, каждый из которых представляет собой операционный усилитель с емкостной отрицательной обратной связью.
С выхода датчика 4 снимается сигнал, пропорциональный усилию, действующему на ось колеса со стороны остальной части конструкции платформы. В случае независимой подвески это усилие равно суммарному усилию в рессоре и амортизаторе, соединяющих ось колеса с платформой. При мостовой схеме это усилие будет равно равнодействующей всех сил, действующих на ось колеса, за вычетом силы инерции (фиг. 3) Датчик 4 может быть выполнен в виде тен
0
5
0
5
0
5
0
зорезистора, который измеряет деформацию упругого элемента, соединяющего подвеску с осью колеса, пропорциональную искомому усилию. В случае мостовой схемы подвески таким упругим элементом, например, является участок моста автомобиля между осью колеса и рессорой, а искомое усилие равно прерывающей силе в сечении, где установлен датчик.
Сигналы с выходов датчиков 3 и 4 поступают на соответствующие входы сумматора 7, где происходит вычисление суммарного усилия, действующего на ось колеса. С выхода сумматора 7 сигнал поступает на вход датчика 6, в котором воспроизводится упругая характеристика эластичного колеса. Конструктивно датчик 6 может быть выполнен в виде блока нелинейностей. в качестве которого может быть использована стандартная вставка функционального преобразователя, входящая в комплект набора блока нелинейностей серии НБН-1. В зависимости от суммарного усилия R с выхода датчика 6 снимается сигнал, пропорциональный деформации 5± колеса. Сигналы с выходов датчика и блока 9 интегрирования поступают в дополнительный сумматор 8, где в соответствии с приведенным выражением вычисляются значения высот рельефа. С выхода сумматора 8, а также с выхода датчика 5 пути сигналы поступают на регистратор 10.
Для измерения профиля пути на одной колее достаточно установить датчики 3, 4 и 6 на одном из колес платформы и иметь соответственно по одному сумматору 7 и 8 и один блок 9 интегрирования.
Формула изобретения
Устройство для измерения профиля местности, содержащее платформу с подвеской, последовательно соединенные датчик вертикального ускорения оси эластичного колеса, сумматор и датчик деформации эластичного колеса, второй выход датчика вертикального ускорения оси эластичного колеса соединен с входом интегратора, а выход датчика пройденного пути соединен с входом регистратора, отличающееся тем, что, с целью повышения точности, оно снабжено вторым сумматором и датчиком деформации, установленным в соединении оси эластичного колеса с подвеской, выход которого соединен с вторым входом сумматора, первый и второй входы второго сумматора соответственно соединены с выходами датчика деформации эластичного колеса и интегратора, а выход соединен с вторым входом регистратора.
Фиг.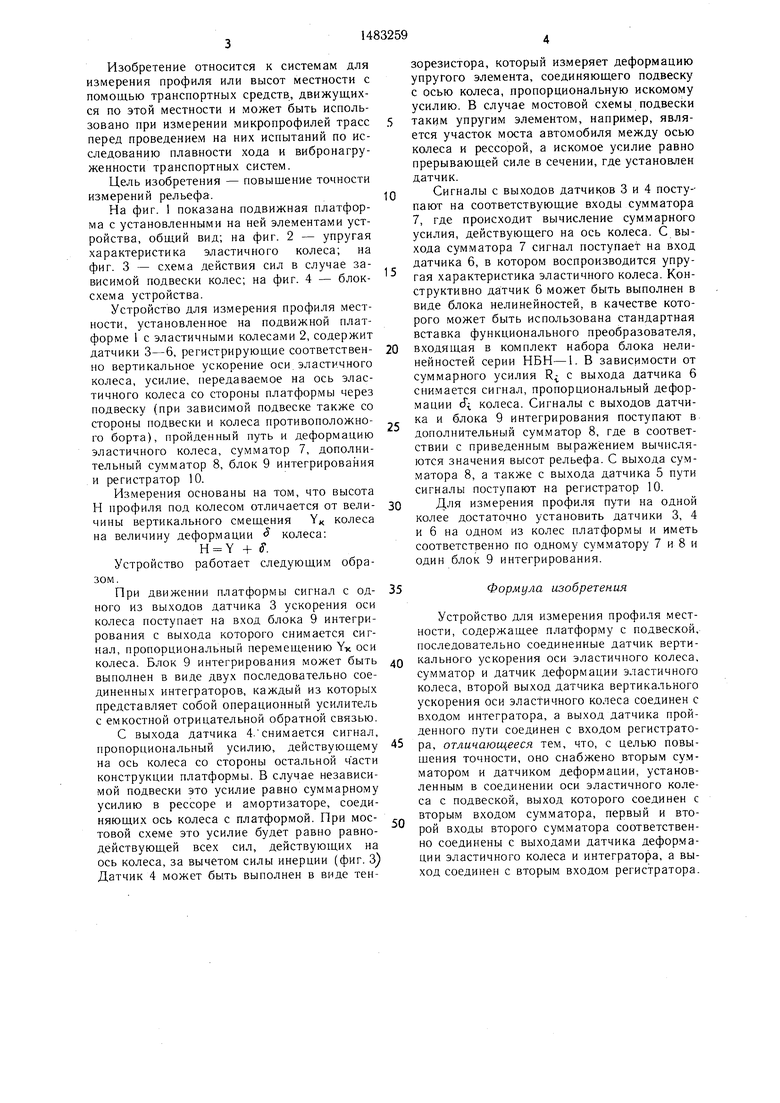
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Система регулирования характеристики подвески транспортного средства | 1991 |
|
SU1794699A2 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 1997 |
|
RU2134319C1 |
| Способ измерения частоты и амплитуды морских ветровых волн | 1991 |
|
SU1812429A1 |
Изобретение предназначено для измерения высот по направлению перемещения транспортного средства. С целью повышения точности и расширения функциональных возможностей сигнал с датчика 3 ускорения оси эластичного колеса поступает на интегратор 9 и далее на второй сумматор 8. С выхода датчика 4 деформации в соединении оси эластичного колеса с подвеской сигнал поступает на второй вход сумматора 7, с выхода которого результирующий сигнал поступает на вход датчика 6 деформации эластичного колеса. Во втором сумматоре 8 определяется искомое превышение, которое совместно с информацией от датчика 5 пути поступает на регистратор 10. 4 ил.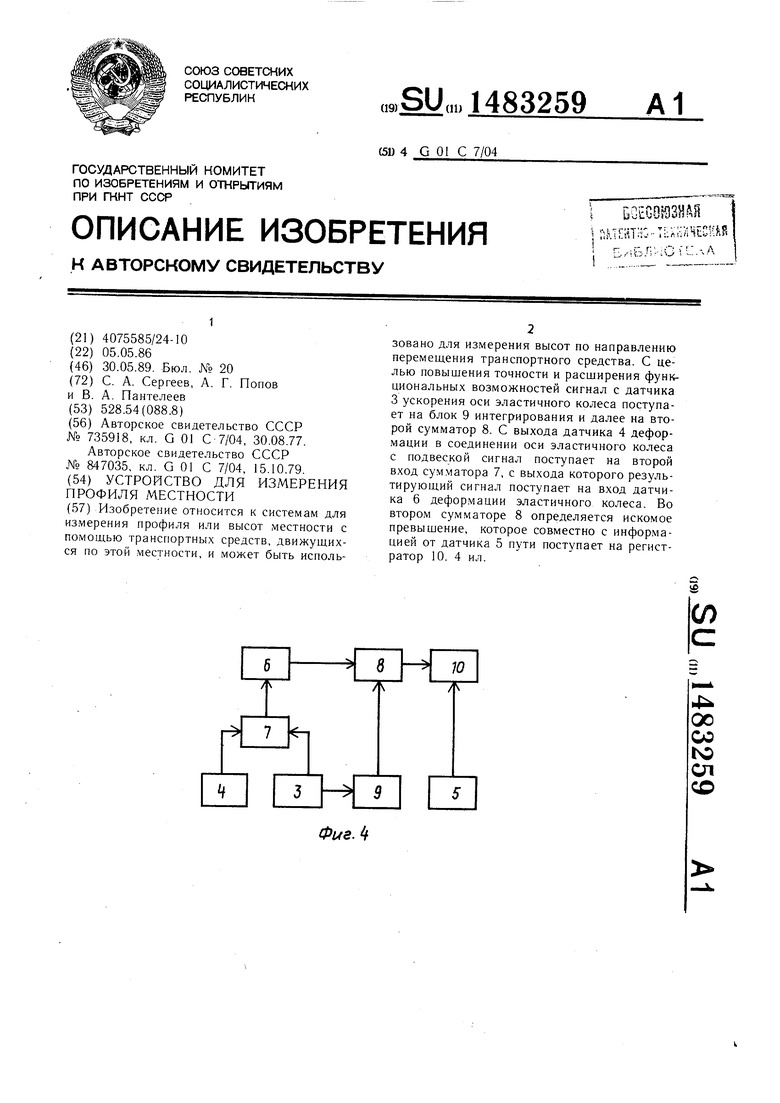
Фиг. 3
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
