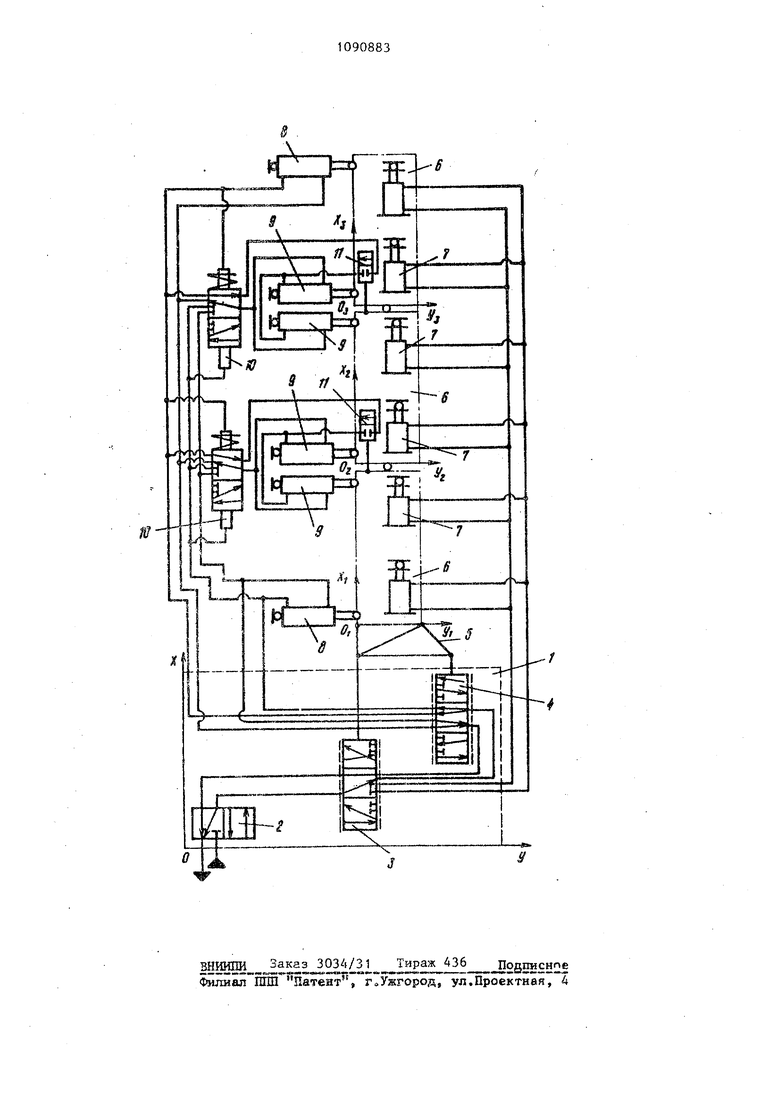
Изобретение отя-осится к горному делу, к механизиррнанным крепям, а именно к устройствам для управления прямолинейностью фронта крепи и поло жением относительно оконтуриваюп{их выемочный участок выработок и может быть использовано в горной промышленности, в механизированных крепях для отработки тонких крутых пластов угля. Известно устройство для управления механизированной крепью, включаю щее опорные платформы, установленны на рельсах, проложенных по штрекам, соединенные несущими канатами и кан тами перед.вижки конвейера и секций крепи 1 . Недостаток данного устройства заключается в том, что между опорной платформой и базой крепи (конвейером) отсутствуют кинематические связи, с помощью которых можно бьио бы управлять положением базы крепи относительно опорной платформы и ба зовой выработки. Наиболее близким к предлагаемому по технической сущности является устройство для управления механизированной крепью, включающее гидроЦКЛИН.ДРЫ перемещения, шарнирно связанные с секциями базы, напорную и сливную магистрали к махакизм углового перемещения, содержащий отсечные элементы, сообщенные с напорной магистралью и гидроцилиндрами перем щения и имеющие обратную связь с соседней секцией базы 2j . Однако такое выполнение не позво ляет управлять прямолинейностью фронта базы и крепи при криволинейн штреке ввиду небольшой длины секций базы и наличия последовательности из большого числа таких единиц, в которой происходит накопление недоп тимых ошибок установки. Кроме того, отправления каждым гидроцилиндром передвижки производится в системе координат, соответствующей секции крепи, с которой кинематически связан этот гидроцилиндр, т.е. нет единой системы отсчета при управлении последовательностью секций базы Это увеличивает ошибку установки на „ калодом стыке секции оазы и, следова тельно, накопленную ошибку в последовательности, недопустимлто для усл вий тонких крутых пластов. Целью изобретения является автоматическое управление положением базы крепи при криволинейном штреке. Поставленная цель достигается тем, что устройство для управления механизированной крепью, включающее гидроцилиндры перемещения, шарнирно связанные с секциями базы, напорную и сливную магистрали и механизм углснвого перемещения, содержащий отсечные элементы, сообщенные с напорной магистралью и гидроцилинд,рами перемещения и имеющие обратную связь с соседней секцией базы, снабжено сообщенными между собой золотником ликейньгх перемещений и гидроиилиндрами боковых смещений базы, механизм углового перемещения снабжен золотником угловых перемещений, дополнительными гндрощшивдрами, расположенными по концам базы, и распределителями режима передвижки, а база снабжена, и арнирно закрепленной на ее конце одним из оснований, жесткой трапецией, другое основани.е которой шариирно связано со штоками золотников, при этом выход золотника линейных перемешений сообщен с входом золотника угловых перемещений, последний сообщен с дополнительными гидрсг.г.илиндрами и через распределители режима передвижки - с отсечными элементами, а корпуса золотников установлены с возможностью перемещения вдоль оси штрека. На чертеже приведена гидроккиенатическая схема устройства для управления положением базы крепи относительно базовой выработки. Устройство содержит платформу (схематично обозначено пунктиром, прямоугольником)5 установленную на рельсовом ходу в базовой выработке и снабженную гидравлически связанными распределителем 2, золотниками 3 и 4 соответственно линейных PI угловых перемещений. Платформа 1 задает внешнюю систему отсчета хОу. Золотники 3 и 4 шарнирно присоединен) к жесткой трапеции 5, которая также шаркирно соединена в ПЛОСКОСТРГ осей золотников линейных 3 и угловых 4 перемещений с одним из концов базь, составленной из соедине)нььч шарнирно жестких секций 6. Секции б базы задают локальные системы координат , , и т.д., в которых управляются группы секций крепи (не 310 показаны). Гидроцилиндры 7 боковых смещений базы имеют непосредственную гидравлическую связь с золотником 3 линейных перемещений, а конце вые гидроцилиндры 8 передвижки с золотником 4 угловых перемещений. Гидроцилиндры 9 передвижки, установленные на стыках секций 6 базы, имеют гидравлическую связь с золотником 4 угловых перемещений через распределители 10 режима передвижки и отсечные клапаны 11. Гидроцилиндры 7-9 одним концом связаны с- секциями базы, а другим - с распертыми гидростойками секций крепи. Устройство работает, следующим образом, В исходном положении секции 6 баз расперты в кровлю и почву гидростойками (не показаны), секции крепи пос ле выемки ленты угля подтянуты относительно зафиксированной базы к забо и их гидростойки расперты. Распределитель 2, золотники линейных 3 и угловых 4 перемещений, а также отсеч ные клапаны 11 в положении, изображенном на схеме. Снимается распор со стоек, фиксирующих положение базы гидроцилиндры передвижки секций креПИ (не. показаны) подключаются к еливу. Распределитель 2 переводится во второе положение, при этом жидкость под дав.г ением через золотник 3 линей ных перемещений подается либо к гидроцилиндрам 7 боковых смещений базы (если во время выемки угля и передви ки секций крепи положение оазы изменилось) и секции 6 базы ycTaiiaaливаются в необходимое по линейному расстоянию до базового штрека положение, либо к золотнику-4 угловых перемещений. В зависимости от углового положения секций 6 базы жидкость от золотника 4 угловых перемещений непосредственно поступает либо к обеим концевым гидроцилиндрйм 8 передвижки, либо к одному из них. В обеих случаях жидкость под давлением через распределители 10 режима передвижки подается к отсечным 1шапанам 11, при этом, в случае раздвижения обеих концевых гидроцилиндров 3 8 передвижки, распределители 10 удерживаются пружиной. Секции 6 базы, расположенные по флангам (одна из них или обе), совершают вращательное движение относительно шарнира с соседней секцией базы, при этом сеответствующий отсечной клапан 11, имеющий обратную связь с соседней секцией базы, открывает доступ жидкости к паре ципиндров 9 передвижения на соответствующем стыке секций 6 базы. И так далее до середины забоя или его конца. При этом, база совершает плоскопараллельное или вращательное движение в несколько вогнутом со стороны забоя положении фронта базы. Одновременно с движением базы по рельсам на базовом штреке перемещается платформа 1. При этом линейное и угловое взаимное положение платформы 1 и секций 6 базы изменяется. Это вызывает соответствующие изменения в режимах работы гидроцилиндров 7-9. Концевые гидроцилиндры 8 передвигают концевые секции базы до упора в гидростойки секций крепи и движение по флангу базы или обоим флангам прекращается, а гидроцилиндры 9 продолжают двигать секции 6 базы, выпрямляя их фронт до тех пор, пока отсечные клапаны 1 не прекратят этого движения. Гидроцилиндры 8 и 9 имеют запас хода в расчете на возможную недодвижку секций крепи. Во время всего процесса передвижки гидроцилиндры 7 боковых смещений устанавливают базу по необходимому линейному размеру до базовой выработки. Гидросто1Чки базы распираются, фиксируя ее положение, распределитель 2 переводится в исходное положение. Крепь готова для повторения технологического цикла. Таким образом, предлагаемое устройство обеспечивает не только прямолинейность фронта крепи, но и заданное его угловое и линейное положение относительно базовой выработки и тем самым увеличивает надежность и снижает трудоемкость управ- ления.
А
ff

| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегатированная механизированная крепь | 1989 |
|
SU1739046A1 |
| Секция механизированной крепи | 1979 |
|
SU945465A1 |
| Секция механизированной крепи | 1982 |
|
SU1113562A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ОТРАБОТКИ ПЛАСТОВ КАМЕРАМИ | 1998 |
|
RU2136888C1 |
| Секция механизированной крепи | 1979 |
|
SU945464A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Механизированная крепь | 1982 |
|
SU1055887A1 |
| Система гидравлического управления секциями крепи угледобывающего агрегата | 1985 |
|
SU1332035A1 |
| Механизированная крепь сопряжения | 1989 |
|
SU1717837A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ СОПРЯЖЕНИЯ | 2012 |
|
RU2490468C1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МЕХАНИЗИРОВАННО КРЕПЬЮ, включающее гидроцилиндры перемещения, шарнирно связанные с секциями базы, напорную и сливную магистрали и механизм углового перемещения, содержащий отсечные элементы, сообщенные с напорной магистралью и гидроцилиндрами перемещения и имеющие обратную связь с соседней секцией базы, отличающееся тем, что, с целью автоматического управления положением базы крепи при кривсзлинейном штреке, оно снабжено сообщенными между собой золотником линейных перемещений и гидроцилиндрами боковых смещений базы, механизм углового перемещения снабжен золотником угловых перемещений, дополнительными гидроцилиндрами, расположенными по концам базы, и распределителями режима передвижки, а база снабжена шарнирно закрепленной на ее конце одним из оснований, жесткой трапецией, другое основание которой шарнирно связано со штоками золотников, при этом выход золотника линейных перемещений сообщен с вхоW дом золотника угловых перемещений, последний сообщен с дополнительными гидроцилиндрами и через распределители режима передвижки - с отсечными элементами, а корпуса золотников установлены с возможностью перемещения со о вдоль оси штрека. 30 00 JCO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Солод В.И | |||
| и др | |||
| Горные машины и автоматизированные комплексы | |||
| М., Недра, 1981, с | |||
| Передвижная комнатная печь | 1922 |
|
SU383A1 |
| V,18. | |||
