2. Манипулятор по п.1, отличающийся тем, что шайбаФиксатор имеет восьмигранное отверстие,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| Манипулятор | 1981 |
|
SU1007960A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| Манипулятор модульного типа | 1988 |
|
SU1558663A1 |
| Транспортное устройство автоматической линии спутникового типа | 1986 |
|
SU1447640A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| КЛЕПАЛЬНАЯ МАШИНА | 2024 |
|
RU2832661C1 |
| Жесткое сцепное устройство сочлененного транспортного средства | 1990 |
|
SU1754491A1 |
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |

1. МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА, содержащий шарнирно соединен- ные между собой звенья, имеющие стыковочные элементы и приводы,например силовые цилиндры и мембранные механизма, отличающийс я тем, что, с целью повышения точйости позиционирования и расширения технологических возможностей,он снабжен смонтированными на каждом эвене многогранными втулками и гайками, стыковочные элемейты выполнены на концах каждого звена, на рдном конце - в виде сферической головки с осевым многогранным отверстием, а на другом - в виде распо{Ложенной по оси звена полости под сферическую головку последующего звена , причем по оси .каждого звена выполнена вторая полость под силовой цилиндр, шток которого подпружинен и имеет сечение, со от в ет ст вукядее форме от вер сти я сферической головки последующего звена, на внутренних поверхностях каждой гайки установлены мембранные механизмы,штоки которых касаются по(Л верхности последующехч звена,а на торце гайки смонт.итована Шс1йба « фиксатор 00 00 |ю tc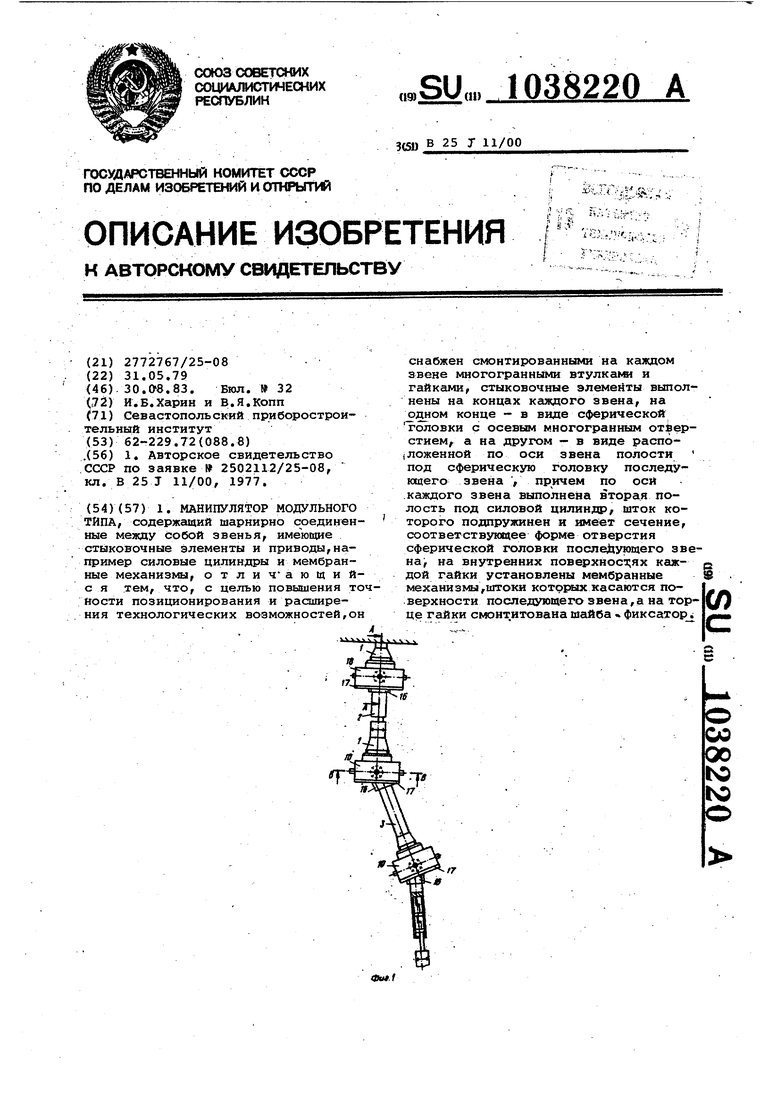
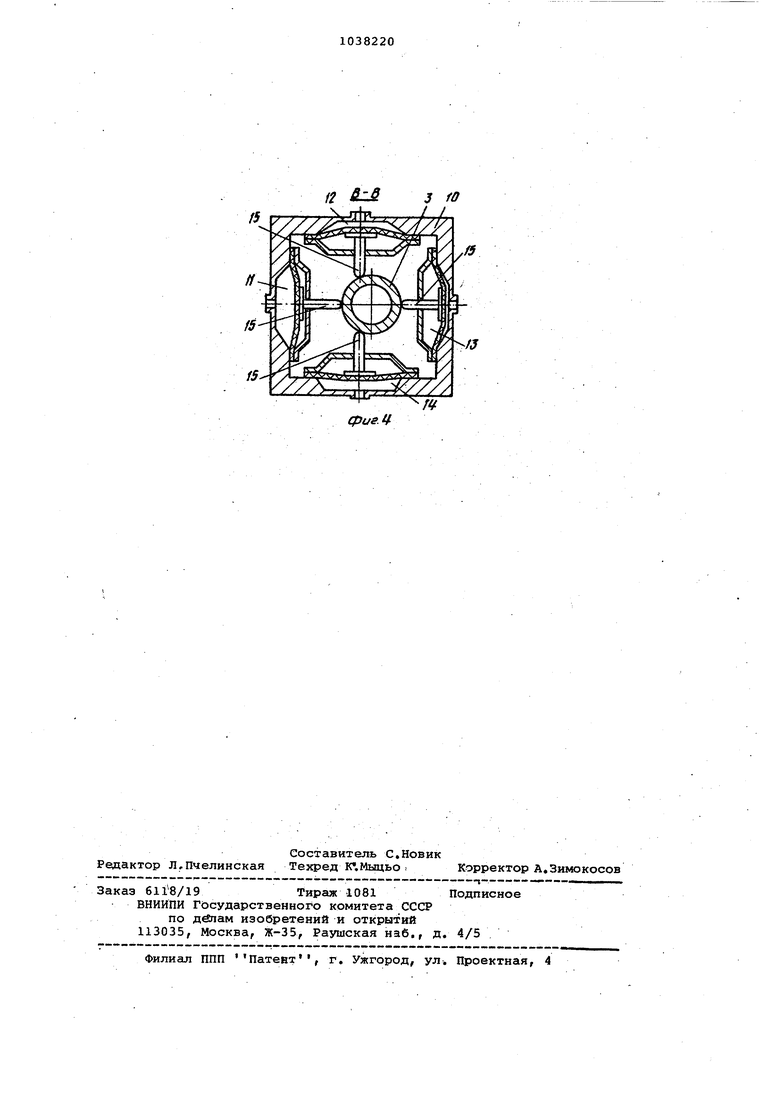
Изобретение относится к станкостроению и может быть использовано в манипуляторах модульного типа для точного перемещения рабочего органа при выполнении сложных сборочных и других работ. Известен манипулятор Модульного, типа, содержащий шарнирно соединёйные между собой звенья, имеющие сты ковочные элементы, и приводы. Однако известный манипулятор имеет ограниченные технологические возможности и низкую позиционирования рабочего органа. Цель изобретения - повышение точности позиционирования и расширение технологических возможностей Поставленная цель достигается тем, что манипулятор снабжен смонтй рованными на каждом звене много- ; гранными втулками и гайками/ сты ковочные элементы выполнены на кон цах каждого звена, на одном конце - в виде сферической головки с осевым многогранным отверстием, а на другом - в виде расположенной по оси звена полости под сфериче ску головку последующего звена, причем по оси каждого звена выполнена вто рая полость под силовой цилиндр, шток которого подпружинен и имеет сечение, соответствующее форме отверстия сферической головки последующего звена, на внутренних поверхностях каждой гайки установлены мембранные механизмы, штоки которых касаются поверхности последу ющего звена, а на торце гайки смон тирована шайба-фиксатор, имекядая восьмигранное отверстие. На фиг. 1 представлен манипулятор модульного типа; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 1. , Манипулятор имеет звенья 1 - 3, которые вместе с расположенными на них приводами и выполненными кА ни стыковочными элементгили образу) модули. На конце каждого звена обг разованы сферические головки 4j в которых по оси звена выполнены мно гогранные отверстия 5, На другом к це звена выполнена полость 6 под сферическую головку Носледующего звена, С этой же стороны звена по оси выполнена полость 7, являюща- ноя полостью силового цилиндра, шток 8 которого имеет сечение, соответствующее форме многогранного отверстия сферической головки последукяцего звена. Шток 8 подпружинен пружиной 9. На конце звена, где выполнены полости 6 и 7, расположена гайка 10, на внут.реннйх поверхностях которой расположены мембранные механизмы 11 -.14. Штоки 15 мембранных механизмов каждого предыдущего звена касаются поверхности последующего звена. На кёокдом звене смонтирована многогранная втулка 16, а на торце гайки 10 установлена шайба-фиксатор 17, форма отверстия которого соответствует сечению многогранной втулки 16 Предыдущее звено подпружинено относительно последующего пружинами 18. в исходном положении оси всех звеньев 1 - 3 лежат на одной прямой. Под действием рабочего давления штоки 8 силовых цилиндров: звеньев вхо-, дят в отверсГия 5 сферических головок 4 последующих звеньев. Давление в мембранные механизмы 11 - 14 в это время не подается. При необходимости повернуть звено 2 или 3 на некоторый угол рабочая жидкость в полость 7 предыдущего звена не подается. В результате шток 8 под действием пружины 9 выходит из отверстия 5 сферической головки 4 последующего звена, т.е. оно расфиксируется, Одновременно подается давление в мембранные механизма 11 14, штоки которых воздействуют на указанное звено. Перемещение звена будет происходить до тех пор,пока многогранная втулка, установленная на этом звене, не упрется в кромку отверстия ьаайбы-фиксатора 17, смонтированной на ггЛке 10 предыдущего звейа. Для возвращения звена в исходное положение давление в мембранных механизмах снимают, а в полость 7 его снова подают. При этом пружины 18 возвращают звено в исходное положение, а шток 8, ВХО1Е1Я в отверстие 5, центрирует и фиксирует его.
(2 SLiS. 3 fO .L-L
fS
f5
фивЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ИНДИКАЦИИ НА ЧАСАХ ПЕРИОДА СУТОК И ВРЕМЕНИ ПЕРИОДА СУТОК И ЧАСЫ С ИНДИКАЦИЕЙ ПЕРИОДА СУТОК И ВРЕМЕНИ ПЕРИОДА СУТОК | 2012 |
|
RU2502112C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
