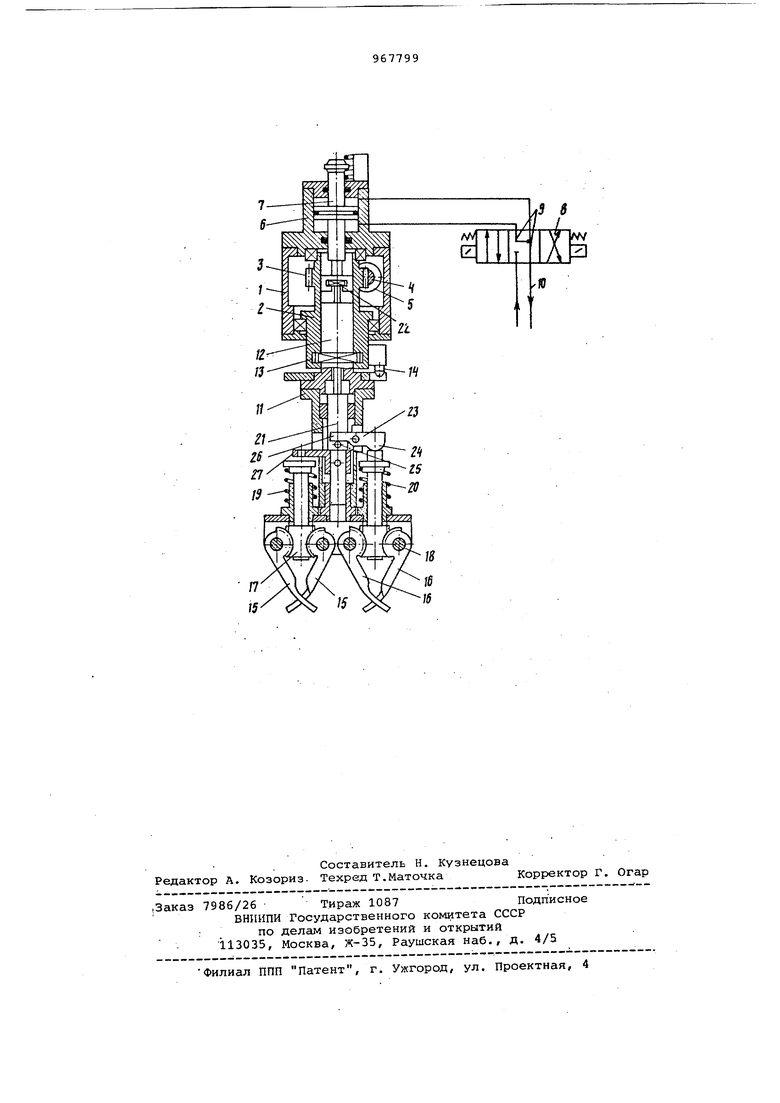
Изобретение относится к машиностроению, а именно к манипуляторам и промышленным роботам, предназначенным для обслуживания металлорежущих станков. По основному авт. св. 510363 известно манипулирующее устройство, содержащее корпус с расположенныгда в нем вращающимся шпинделем, возвратно-поступательно перемещающимся толкателем и захватно головкой l . Недостатком известной конструкции является снижение технологических воз можностей при использовании двухмест ных захватных головок, т.е. невозможность поворота деталей на 180 для установки в станок другим концом. Цель изобретения - расширение технологических возможностей устройства за счет обеспечения возможности кантования изделия при использовании сменной захватной головки с двумя парами захватов. Указанная цель достигается тем, что манипулирующее устройство снабжено ползуном, двуплечим рычагом и трех позиционным гидрораспределителем, каналы которого соединены с одной сто роны с рабо.чими полостями гидроцилинд ра, а с другой стороны - со сливной магистралью, при этом одна из губок захватной головки контактирует с ползуном, а другая - с двуплечим рычагом, который смонтирован на захватной головке. Ка чертеже показано манипулирующее устройство и принципиальная гидропневмосхема привода толкателя, общий вид. В корпусе 1 манипулирующего устройства помещен поворотный шпиндель 2, на котором закреплено зубчатое колесо 3, связанное с зубчатой рейкой, нарезанной на штоке 4 приводного цилиндра 5. К корпусу 1 крепится гидроцилиндр 6 привода толкателя 7. Рабочие полости цилиндра 6 соединены с трехпозиционным гидрораспределителем 8, имеющим каналы 9, соединяющие обе полости гидроцилиндра 6 со сливной магистралью 10 с средней позиции гидрораспреде.пителя. Корпус 11 захватной головки имеет цилиндрический хвостовик 12, входящий в отверстие шпинделя 2. В осевом направлении захватная головка заперта байонетным замком 13, а в угловом положении - фиксатором 14. Захватная головка снабжена двумя комплектами захватных губок 15 и 16. На губках 15 и 16 выполнены зуб тые секторы, находящиеся в зацеплении с двухсторонними зубчатыми рейками 17 и 18 соответственно, которы подпружинены пружинами 19 и 20. В корпусе 11 захватной головки с возм ностью осевого перемещения помещен ползун 21, связанный посредством байонетного замка 22 с толкателем 7 На корпусе 11 также помещен с возможностью качания двуплечий рычаг 2 плечо 24 которого может контактировать с концом рейки 18. На ползуне 2 закреплен упор 25, имеющий возможность контактирования с плечом 26 ры чага 23 и выступ 27, имеющий возможность контактирования с концом рейки 17. Устройство работает следующим образом. В исходном положении захватные губки 15 и 16 сведены под действием пружин 19 и 20, выступ 27 находится в контакте с концом рейки 17, плечо 24 двуплечего рычага 23 - с концом рейки 18, а его второе плечо 26 с упором 25. Поршень гидроцилиндра 6 находится при этом в среднем положении и обе его полости соединены со сливной магистралью 10 каналагли 9, Для разжима захватных губок 15 давление подается в верхнюю полость гидроцилиндра 6. При этом толкатель и ползун 21 перемещаются вниз. Выступ 27 ползуна 21 сдвигает рейку 17 сжимая пружину 19, и .губки 15 раскры ваются за счет зацепления их зубчатых секторов с рейксй. Упор 25 в этом случае отходит от плеча 26 рыча га 23 и захватные губки 16 остаются сжатыми. Для разжима губок давление подается в верхнюю полость цилиндра.При этом толкатель 7 и ползун 21 перемещаются вверх, и упор 25 сдвигает Плечо 26 рычага 23. Плечо 24 перемещается вниз и, сжимая пружину 20, смещает рейку 18, что приводит к раскрытию губок 16. Для поворота на 180° изделия, зажатого в захватах-, включается приводной цилиндр 5, который через щток 4 и зубчатое колесо 3 поворачивает шпиндель 2. Поскольку захватная головка крепится на шпинделе 2 с помощью байонета 13 и фиксатора 14, она поворачивается вместе со шпинделем 2. Применение предлагаемого устройства позволяет совместить высокую производительность, обеспеченную при использовании головки с двумя захватами, с возможностью производить тем же устройством переориентацию изделий (поворот на 180)между операциями обработки. Это имеет особенно важное значение для участков, обслуживаемых одним роботом и состоящих из группы станков с горизонтальной осью шпинделя. Формула изобретения Манипулирующее устройство по авт. св. № 510363, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспечения кантования детали при работе.в цикле со сменной двухместной захватной головкой, оно снабжено ползуном, двуплечим рычагом и трехпозиционным гидрораспределителем, каналы которого соединены с од- ной стороны с рабочими полостями гидроцилиндра, а с другой стороны со сливной магистралью, при этом одна из пар губок захватной головки контактирует с ползуном, а другая с двуплечим рычагом, который смонтирован на захватной головке. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР tt 510363, кл. В 25 J 11/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1978 |
|
SU695810A1 |
| Манипулирующее устройство | 1974 |
|
SU510363A1 |
| Манипулирующее устройство | 1978 |
|
SU674890A2 |
| Устройство для центрирования и зажима | 1988 |
|
SU1613288A1 |
| Гидравлический синхронный механизм зажима | 1985 |
|
SU1284769A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Захватное устройство | 1985 |
|
SU1263525A1 |
| Полуавтомат для заточки резцов | 1990 |
|
SU1779547A1 |
| ИНСТРУМЕНТ ДЛЯ СПАСАТЕЛЬНЫХ РАБОТ | 1992 |
|
RU2061588C1 |