Изобретение относится к технике мапулирования изделиями, в частности к манипуляторам промышленных роботов различного назначения, и может быть использовано и в других областях техники. По основному авт. св. № 772844 известен схват манипуляционного робота, содержащий корпус, гибкую упругую ленту, шарнирно закрепленную на корпусе и шарнирно связанную с приводом, причем в корпуее выполнена ассимметричная оси корпуса полость, а гибкая лента расположена в этой полости вдоль оси корпуса 1. Недостатком известного схвата является малая надежность работы. Под действием привода гибкая упругая лента изгибается в сторону захватываемой детали и прижима ет последнюю к стенке полости. Однако при дальнейшем действии привода на упругую ленту может произойти искривление упругой ленты по одну из сторон захватываемой детали, вследствие чего деталь сместится или выпадет из схвата, что приведет к нарушению точности позиционирования и остановке всего робототехнического комплекса, в состав которого входит манипулятор с данным захватом. Цель изобретения - повышение надежности работы схвата. Поставленная цель достигается тем, что в схвате манилуляционного робота, содержащем корпус, полость, выполненную асимметрично оси корпуса, гибкую упругую ленту, установленную в полости и шарнирно закрепленную на корпусе и приводе, гибкая упругая лента выполнена выпуклой от оси корпуса. На чертеже показан схват манипуляционного робота, общий вид в разрезе. Схват содержит корпус 1, полость 2, выполненную асимметрично оси корпуса 1, привод 3, гибкую упругую ленту 4, установленную в полости 2 и шарнирно закрепленную на корпусе 1 и приводе 3, причем гибкая упругая лента 4 выполнена выпуклой от оси корпуса 1, деталь 5. Схват работает следующим образом. При опускании рука промыщленного робота в полость 2 корпуса 1 подается деталь 5. Включают привод 3, который натягивает гибкую упругую ленту 4 до спрямленного состояния 6. При этом гибкая упругая лента 4 своей вогнутой стороной прижимает деталь 5 к корпусу 1, после переноса последней отключают привод 3, и гибкая упругая лента из спрямленного состояния 6 под действием сил упругости возвращается в исходное выпуклое состояние. Далее осуществляют подъем руки промыщленного робота, и деталь 5 освобождается ,для дальнейших операций. Выполнение гибкой упругой ленты вь1пуклой от оси корпуса и прижатие детали вогнутой стороной ленты позволяют повысить надежность работы схвата манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипуляционного робота | 1979 |
|
SU772844A1 |
| Схват манипуляционного робота | 1986 |
|
SU1351780A2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Схват промышленного робота | 1978 |
|
SU716811A1 |
| УПРУГОДЕФОРМИРУЕМЫЙ СХВАТ | 2013 |
|
RU2564802C2 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Схват промышленного робота | 1977 |
|
SU662344A1 |
| Схват промышленного робота | 1989 |
|
SU1749020A1 |
| Вакуумный схват для листовых деталей | 1982 |
|
SU1030293A1 |
СХВАТ / 1АНИПУЛЯЦИОННОГО РОБОТА по авт. св. № 772844, отличающийся тем, что, с целью повышения надежности работы. схвата, гибкая упругая лента выполнена выпуклой от оси корпуса. (Л со со СП от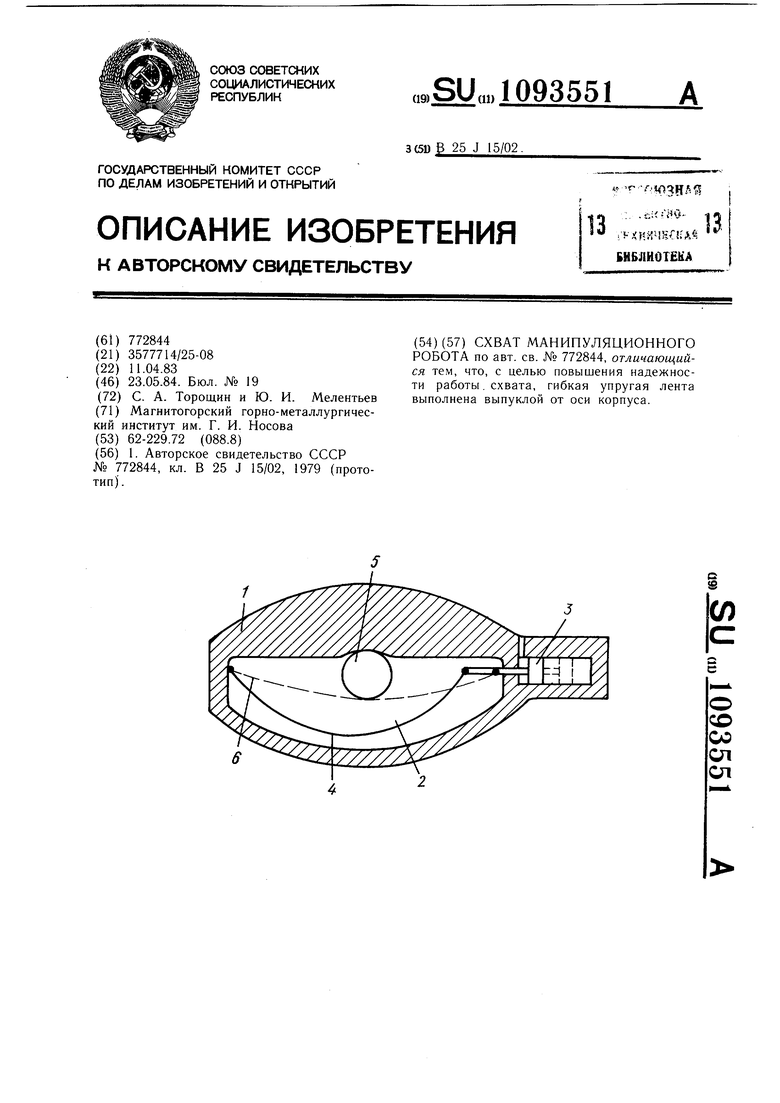
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват манипуляционного робота | 1979 |
|
SU772844A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
