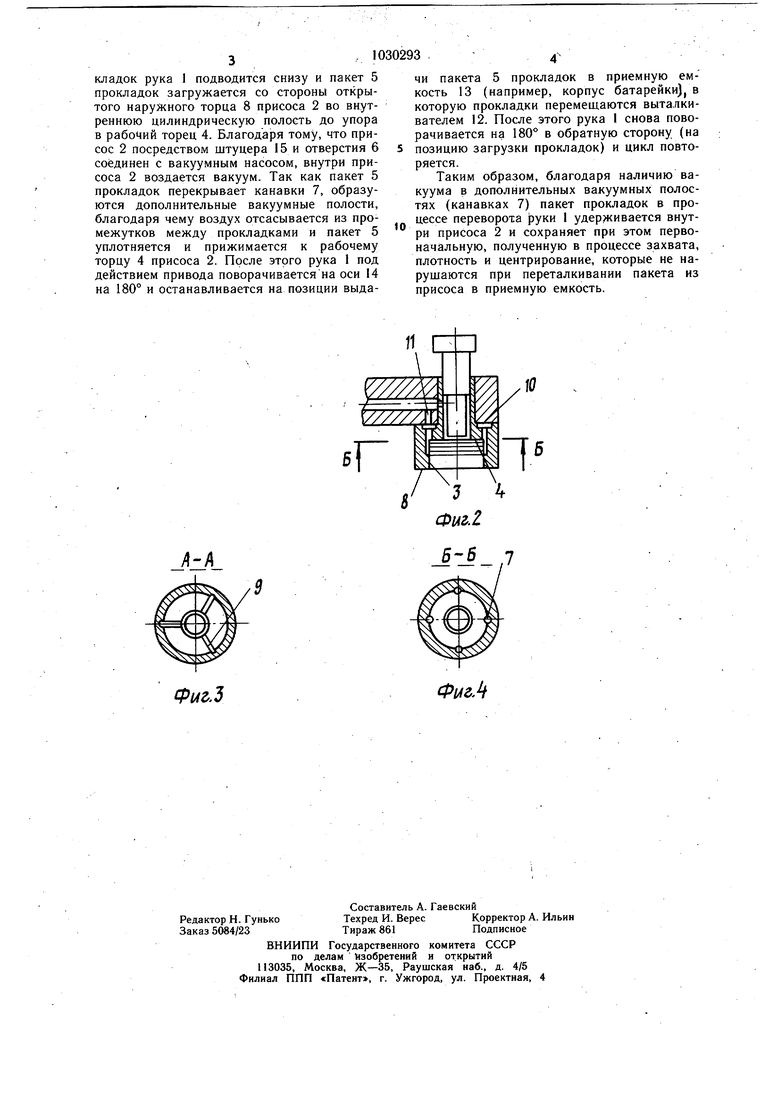
Изобретение относится к средствам автоматизации технологических процессов и может быть использовано, например, в промыщленных роботах, применяемых в приборостроении, в часовой промышленносфи и радиоэлектронике. Известен пневматический захват, содержащий струйный присос, включающий корпус с плоским рабочим торцом и воздухопроводящим каналом, а также расположенные на корпусе захваты, выполненные в виде эластичных трубок и соединенные с .кольцевым воздухоподводящим каналом. Конструкция струйного присоса позволяет захватить пакет плоских деталей 1. . Недостатком известного струйного присоса является возможность, «распушения деталей в пакете и нарушения их ориентации между собой вследствие наличия воздущного потока с периферии пакета . Таким образом, захват не обеспечивает требуемого уплотнения и центрирования по наружному контуру пакета деталей в процессе его захвата. Наиболее близким техническим решением к изобретению является вакуумный схват для листовых деталей, содержащий присос с боковой поверхностью, плоским рабочим торцом и центральным отверстием, соединенным с источником вакуума. Исполнительная часть известного схвата выполнена из упругого материала, например резины или пластмассы, и шарнирно соединена с корпусом схвата, который посредством штуцера установлен в руке автооператора. При подводе схвата к захватываемой детали воздух через отверстие в упругом присосе откачивается из пространства между поверхностью детали и внутренней частью присоски и деталь оказывается прижатой к рабочему торцу присоса 2. Однако присос не может захватить больше, чем одну деталь, т.е. пакет плоских деталей. Цель изобретения - повышение производитепьности путем обеспечения захвата пакета деталей, преимущественно неметаллических, и его транспортирования. Цель достигается тем, что в вакуумном схвате для листовых деталей, содержащем присос с боковой поверхностью, плоским рабочим торцом и центральным отверстием. соединенным с источником вакуума, внутренняя боковая поверхность присоса выполнена цилиндрической и имеет вертикальные канавки, закрытые со стороны наружного торца присоса и сообщающиеся с источником вакуума. Кроме того, канавки соединены с источником вакуума посредством горизонтальных каналов, выполненных в плоскости рабочего торца присоса и сообщающихся с центральным отверстием. . При этом канавки со стороны рабочего торца присоса соединены между собой кольцевой проточкой,.сообщающейся с источником вакуума. На фиг. 1 показано выполнение схвата с горизонтальными каналами; на фиг. 2 - то же, с кольцевой проточкой, на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 2. Предлагаемый вакуумный схват установлен в руке 1 автооператора (не показан) и содержит чащеобразный металлический. присос 2, внутренняя боковая поверхность 3 которого выполнена цилиндрической в размер захватываемой детали. Донная часть присоса служит базовым рабочим торцом 4 для пакета 5 тонких плоских деталей. В присосе 2 имеется центральное отверстие б, через которое подводится вакуум к захватываемым деталям. На внутренней боковой цилиндрической поверхности 3 приcoca 2 выполнены глухие вертикальные канавки 7, закрытые со стороны наружного торЦЗ 8, которые сообщаются с системой вакуумирования схвата (не показана), По первому варианту (фиг. 1) конструктивного выполнения присоса 2 канавки 7 связаны с вакуумподводящим отверстием 6 посредством каналов 9, расположенных в донной части присоса 2. По второму варианту (фиг. 2) канавки 7 выполнены сквозными в сторону заднего торца присоса, на котором имеется кольцевая проточка 10, связанная с системой вакуумирования посредством канала 11, выполненного в руке 1. Канавки 7 образуют вакуумные полости между внутренней цилиндрической поверхностью 3, которая является центрирующей для захватываемых деталей, и периферией пакета 5 и выполнены глухими со стороны наружного торца 8 присоса 2. Длина канавок 7 меньше высоты поверхности 3 и соответствует длине пакета 5 деталей. Это обеспечивает отсутствие связи канавок 7с атмосферой при захвате и удержании пакета 5, что способствует улучшению условий вакуумирования схвата; В отверстии 6 присоса 2 с возможностью перемещения установлен выталкиватель 12 для подачи захваченных деталей в приемную емкость 13. Рука 1 вместе с присосом 2 установлена на оси 14, вокруг которой имеет возможность поворота между позициями загрузки и выдачи пакета -5 в приемную емкость 13. (Привод поворота руки 1 не показан). Присос 2 связан с вакуумным насосом (не показан) посредством штуцера 15. Предлагаемый вакуумный схват работает следующим образом. Рука 1 посредством оси 14 монтируется автоматической линии, например, для сборки малогабаритных химических источникое тока. На позицию комплектования пакета 5 тонких листовых заготовок - прорсладок рука 1 подводится снизу и пакет 5 прокладок загружается со стороны открытого наружного торца 8 присоса 2 во внутреннюю цилиндрическую полость до упора в рабочий торец 4. Благодаря тому, что присос 2 посредством штуцера 15 и отверстия 6 соединен с вакуумным насосом, внутри присоса 2 воздается вакуум. Так как пакет 5 прокладок перекрывает канавки 7, образуются дополнительные вакуумные полости, благодаря чему воздух отсасывается из промежутков между прокладками и пакет 5 уплотняется и прижимается к рабочему торцу 4 присоса 2. После этого рука 1 под действием привода поворачивается на оси 14 на 180° и останавливается на позиции выдачи пакета 5 прокладок в приемную емкость 13 (например, корпус батарейки), в которую прокладки перемещаются выталкивателем 12. После этого рука 1 снова поворачивается на 180° в обратную сторону (на позицию загрузки прокладок) и цикл повторяется.
Таким образом, благодаря наличию вакуума в дополнительных вакуумных полостях (канавках 7) пакет прокладок в процессе переворота руки I удерживается внутри присоса 2 и сохраняет при этом первоначальную, полученную в процессе захвата, плотность и центрирование, которые не нарушаются при переталкивании пакета из присоса в приемную емкость.
/I-/
Я
.3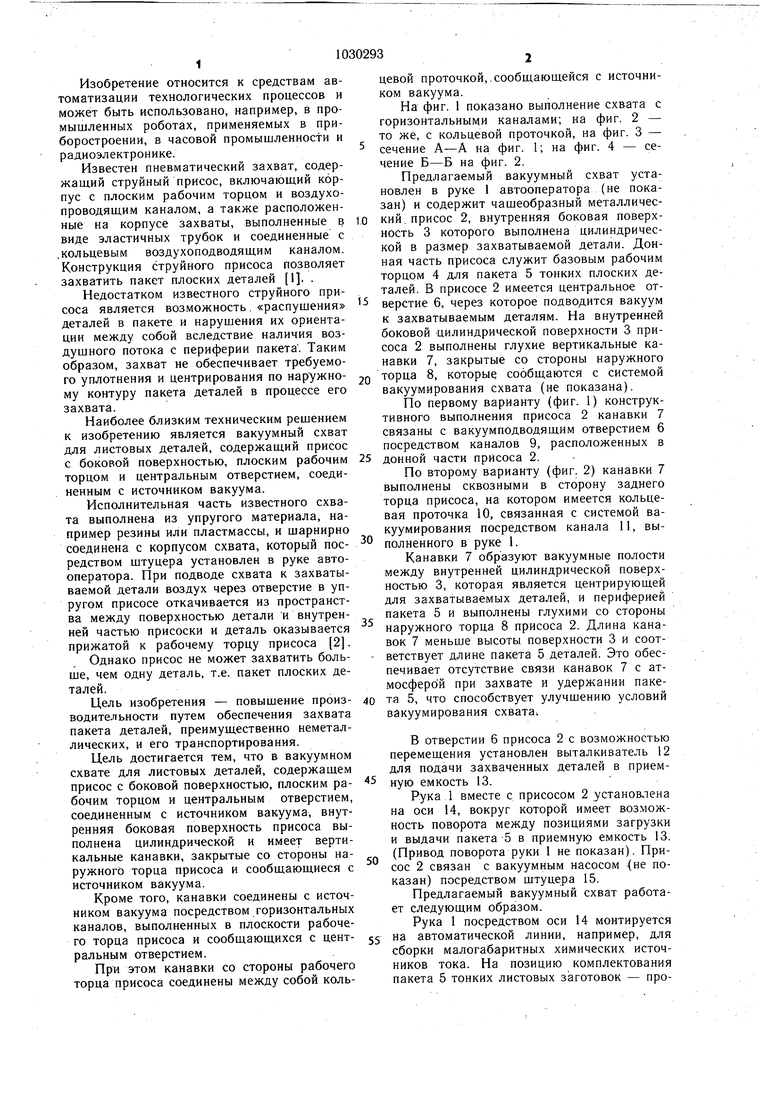
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Манипулятор | 1982 |
|
SU1007965A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Вакуумный захват | 1978 |
|
SU738980A1 |
| Вакуумное захватное устройство | 1984 |
|
SU1187985A1 |
| Автомат для изготовления биполярных электродов химического источника тока | 1980 |
|
SU877654A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО ЗАХВАТА ГИБКИХ ЛИСТОВЫХ ОБЪЕКТОВ | 2003 |
|
RU2258025C1 |
| Вакуумное захватное устройство | 1980 |
|
SU925836A1 |
| ВАКУУМНОЕ УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ НА ОБРАБАТЫВАЮЩЕМ СТАНКЕ | 2002 |
|
RU2258592C2 |
1. ВАКУУМНЫЙ СХВАТ ДЛЯ ЛИСТОВЫХ ДЕТАЛЕЙ, содержащий присос с боковой поверхностью, плоским рабочим торцом и центральным отверстием, соединенным с источником вакуума, отличающийся тем, что, с целью повышения производительности путем обеспечения захвата пакета деталей, преимущественно нвнеталлических, и его транспортирования, внутренняя боковая поверхность присоса выполнена цилиндрической и имеет вертикальные канавки, закрытые со стороны наружного торца присоса и сообщающиеся с источником вакуума. 2.Схват по п. 1, отличающийся тем, что канавки соединены с источником вакуума посредством горизонтальных каналов, выполненных в плоскости рабочего торца присоса и сообщающихся с центральным отверстием. 3.Схват по п. 1, отличающийся тем, что канавки со стороны рабочего торца присоi са соединены между собой кольцевой проточкой, сообщающейся с источником ва(Л куума. со о 1чЭ со 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Струйный присос | 1976 |
|
SU607769A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Белянин П | |||
| И | |||
| Промышленные роботы | |||
| М., «Машиностроение, 1975, с | |||
| Гидравлический способ добычи торфа | 1916 |
|
SU206A1 |
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
