1
бхва манипуляционного робота предназначен для захвата и удержания деталей и может быть использован в машиностроении и других отраслях промышленности. .
Известен схват манипуляционного робота, содержащий корпус, гибкую упругую ленту шарнирно закрепленную на корпусе и шарнирно связанную с приводом fl.
Недостатком устройства является сложность конструкции и ненадежность работы.
Цель изобретения - упрощение конструкции и увеличение надежности работы.
Поставленная цель достигается тем, что в корпусе выполнена ассиметричная оси корпуса полость, а гибкая лента расположена в этой полости вдоль оси корпуса.
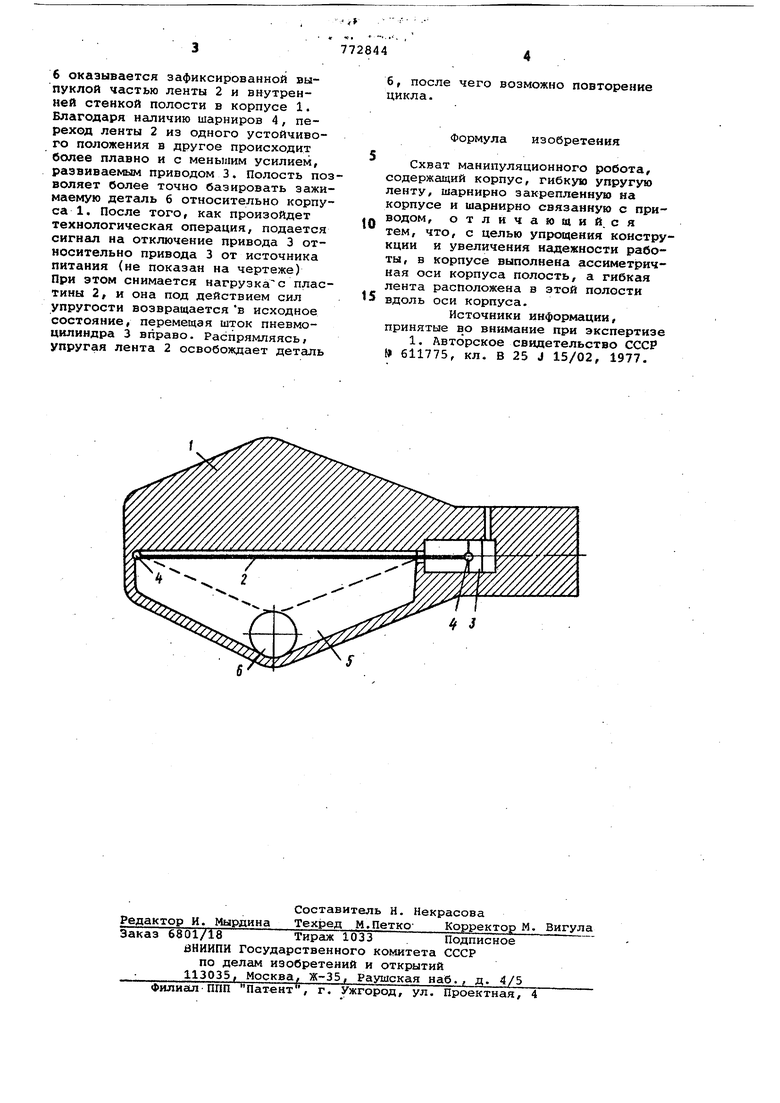
На чертеже схематически изображено устройство.
Схват манипуляционного робота содержит расположенную в корпусе .
1гибкую упругую ленту 2, связанную с приводом 3, представляющим собой пневмоцилиндр. Гибкая упругая лента
2закреплена одним концом в корпусе
1, а другим концом соединена со штоком пневмоцилиндра 3, обеспечивающим продольный изгиб ленты до потери ею. устойчивого состояния. Концы ленты 2 закреплены с помощью шарниров 4, обеспечивакицих плавность работы и меньший износ ленты в точках закрепления. В корпусе 1 выполнена полость 5, обеспечивающая более точное бази10рование зажимаемой детали 6.
Устройство работает следующим образом.
В исходном состоянин лента 2 выпряМлена и шток пневмоцилиндра 3 нахо15дится в крайнем правом положении. При подходе схвата к позиции загрузки зажимаемая деталь располагается продольной ocbjo перпендикулярно к плоскости сечения схвата (по чертежу),
20 против окна в нем. Затем схват перемещается вниз по направлению продольной оси зажимаемой детгши 6, и последняя оказывается в свободном простра ств между корпусом 1 и лентой
25 2. После этого шток пневмоцилиндра 3 перемещается влево, нагружая ленту 2 в продольном направлении. Под действием нагрузки лента прогибаетJQ ся скачкообразно, при этом деталь
6 оказывается зафиксированной выпуклой частью ленты 2 и внутренней стенкой полости в корпусе 1. Благодаря наличию шарниров 4, переход ленты 2 из одного устойчивого положения в другое происходит более плавно и с меньшим усилием, развиваемым приводом 3. Полость позволяет более точно базировать зажимаемую деталь 6 относительно корпуса 1. После того, как произойдет технологическая операция, подается сигнал на отключение привода 3 относительно привода 3 от источника питания (не показан на чертеже) При этом снимается нагрузка с пластины 2, и она под действием сил упругости возвращается в исходное состояние, перемещая шток пневмоцилиндра 3 вправо. Распрямляясь, упругая лента 2 освобождает деталь
6, после чего возможно повторение цикла.
Формула изобретения
Схват манипуляционного робота, содержащий корпус, гибкую упругую ленту, шарнирно закрепленную на корпусе и шарнирно связанную с приводом, отличающий, ся тем, что, с целью упрощения конструкции и увеличения надежности работы, в корпусе выполнена ассиметричная оси корпуса полость/ а гибкая лента расположена в этой полости вдоль оси корпуса.
Источники информации, принятые внимание при экспертизе
1. Авторское свидетельство СССР 611775, кл. В 25 J 15/02, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипуляционного робота | 1986 |
|
SU1351780A2 |
| Схват манипуляционного робота | 1983 |
|
SU1093551A2 |
| Модуль промышленного робота | 1987 |
|
SU1421525A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Схват манипулятора | 1985 |
|
SU1294605A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
