Изобретение относится к устройствам для захвата и удержания заготовок, используемым в машиностроении и других отраслях промышленности.
Целью изобретения является повышение надежности закрепления цилиндрических деталей путем повышения жесткости на концах рабочей части ленты без изменения жесткости в ее средней части.
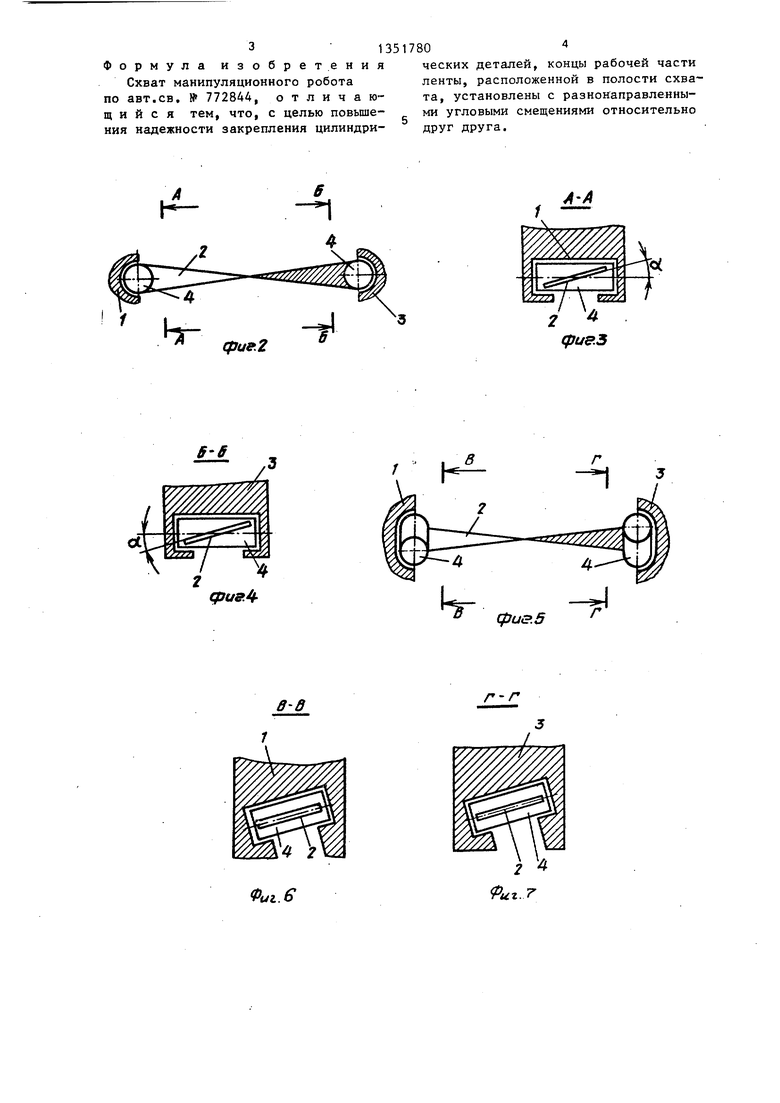
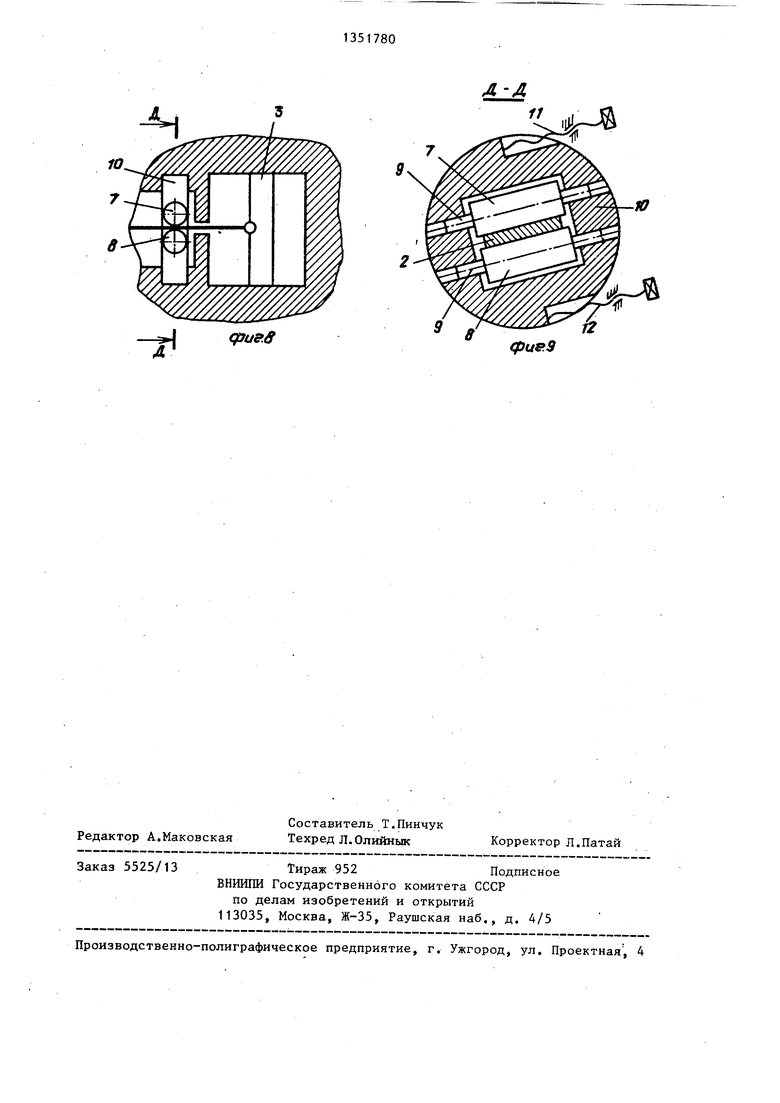
На фиг. 1 изображена общая схема сХватй манипуляционного робота; на фиг. 2 - разворот упругой ленты в шарни рах5нафиг. 3 - разрез А-А на фиг. 2; на фиг. 4 -.разрез Б-Б на фиг. 2; на фиг. 5 - разворот шарниров в корпусе; на фиг. 6 - разрез В-В на фиг. 5j на фиг. 7 - разрез Г-Г на фиг. 5; на фиг. 8 - схема установки дополнительных средств монтажа и угловых смещений концов ленты; на фиг. 9 - разрез Д-Д на фиг. 8.
Схват манипуляционного робота содержит расположенную в корпусе I .гибкую упругую 2, связанную с приводом 3, представляющим собой, например, пневмоцилиндр.
Гибкая упругая лента 2 закреплена одним концом в корпусе, а другим концом Соединена со штоком пневмоци- линдра 3, обеспечивающим продольный изгиб ленты до потери устойчивого состояния. Концы ленты 2 закреплены с помощью шарниров 4, обеспечивающих плавность работы и меньший износ ленты в точках закрепления. В корпусе 1 выполнена полость 5, обеспечивающая более точное базирование зажимаемой заготовки 6.
Концы рабочей части ленты 2, расположенной в полости 5, установлены с разнонаправленными угловыми смещениями один относительно другого. Это достигается тем, что концы ленты 2 монтируют повернутыми на угол oi в шарнирах 4 (фиг. 2, 3, 4). Другим примером выполнения монтажа концов ленты может быть разворот на угол Л шарниров 4, в которых закреплена лента (фиг. 5, 6, 7), относительно корпуса 1.
На чертежах затемненная часть ленты 2 обозначает нижнюю ее сторону
Возможна также установка концов рабочей части ленты 2 посредством дополнительных средств монтажа и обеспечения разнонаправленных угловых смещений концов ленты один относительно другого, выполненных; например, в виде роликов 7 и 8, установленных на осях 9 в поворотной обойме 10, смонтированной в корпусе 1 (фиг. 8 и 9). Поворот обоймы 10
можно осуществлять с помощью регулировочных винтов 11 и 12.
Устройство работает следующим образом.
В исходном состоянии лента 2 выпрямлена и поршень пневмоцилиндра 3 находится в крайнем правом положении. При подходе схвата к позиции загрузки зажимаемая заготовка 6 располагается внутри полости 5 корпуса 1.
После этого поршень пневмоцилиндра 3 перемещается влево, нагружая ленту 2 в продольном направлении. Под действием нагрузки лента скачкробразно прогибается, при зтом заготовка 6 оказывается зафиксированной выпуклой частью ленты 2 к внутренней стенке полости 5 в корпусе 1, выполненной в виде призмы. Благодаря наличию шарниров 4 переход ленты 2 из одного устойчивого положения в другое происходит более плавно и с меньшим усилием, развиваемым приводом 3.
При повышении усилия на штоке пневмоцилиндра 3 лента 2 занимает не только выпуклое положение, но и выпукло-вогнутое; вогнутая, по отношению к общему рабочему профилю ленты часть располагается в зоне детали, создавая дугу охвата заготовки 6. Таким образом, повышается надежность закрепления цилиндрических деталей путем повышения жесткости на концах
рабочей части ленты, устанавливаемых с разнонаправленными угловыми смещениями один относительно другого. При этом середина ленты остается гибкой. Ею производится охват и удержание заготовки по некоторой поверхности, площадь которой зависит от величины повьш1ения усилия на штоке пневмоцилиндра.
По окончании технологической операции подается сигнал на отключение привода (пневмоцилиндра 3) от источника питания (не показан).
При этом снимается нагрузка с ленты 2, и она под действием сил упругости возвращается в исходное положение, перемещая поршень пневмоцилиндра 3 вправо. Распрямляясь, упругая лента 2 освобождает деталь 6, после чего возможно повторение цикла.
Формула изобретения
Схват манипуляционного робота по авт.св. № 772844, отличающийся тем, что, с целью повышения надежности закрепления цилиндри6
ческих деталей, концы рабочей части ленты, расположенной в полости схва- та, установлены с разнонаправленными угловыми смещениями относительно друг друга.
А А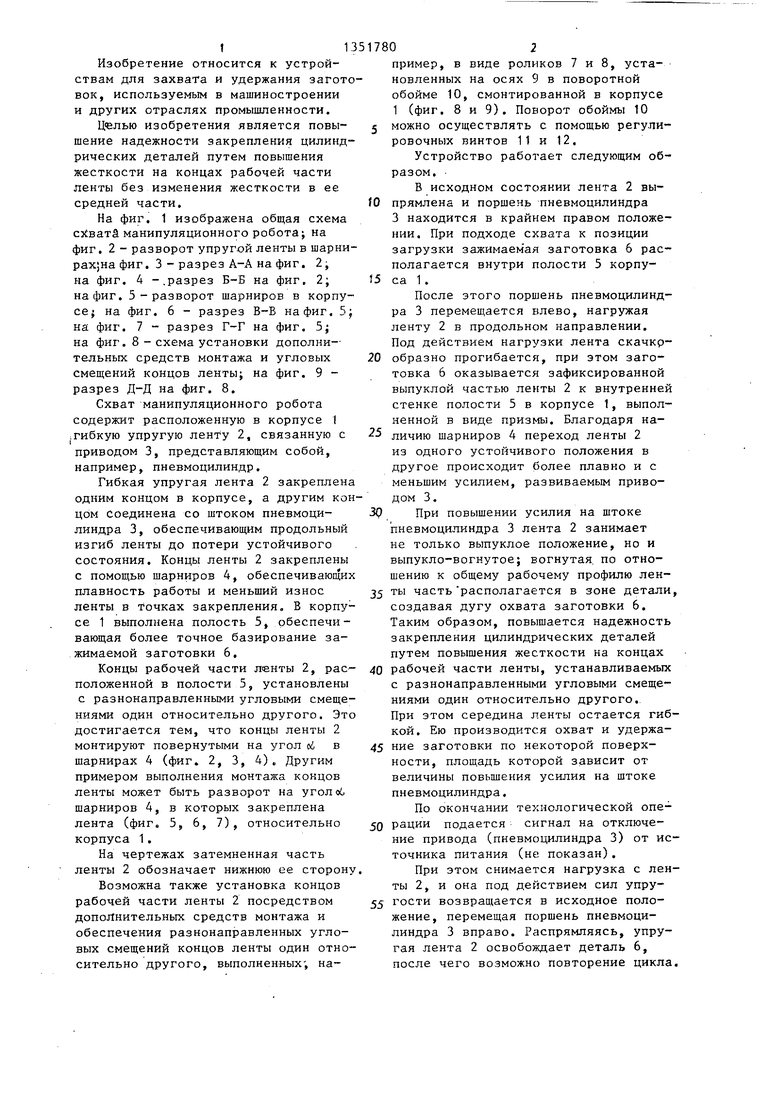
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипуляционного робота | 1979 |
|
SU772844A1 |
| Модуль промышленного робота | 1987 |
|
SU1421525A1 |
| Схват манипуляционного робота | 1983 |
|
SU1093551A2 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
Изобретение относится к устройствам для захвата и удержания заготовок, используемым в машиностроении и других отраслях промышленности. Цель изобретения - повышение надежности закрепления цилиндрических деталей за счет повышения жесткости на концах рабочей части ленты без изменения жесткости в ее средней части. Концы рабочей части ленты 2, расположенной в полости 5 корпуса 1, посредством шарниров 4 установлены с разнонаправленными угловыми смещениями относительно друг друга. Заготовка 6 располагается внутри полости 5. Поршень пневмоцилиндра 3 перемещается влево, нагружа.я ленту 2 в продольном направлении. Под действием нагрузки лента 2 прогибается, фиксируя своей выпуклой частью заготовку 6 к внутренней стенке выполненной в виде призмы полости 5. 9 ил. с S сл сл 00 (jDua/ гч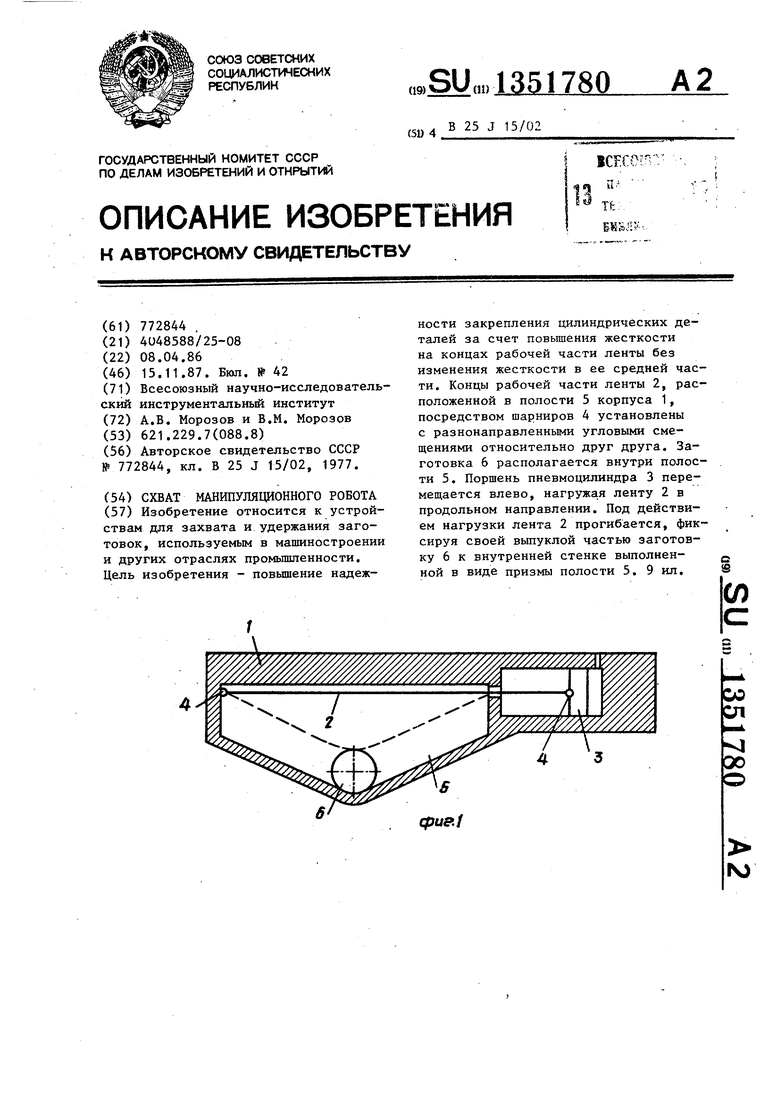
6-6
дзивЛ
в-в
г-г
Фиг.6
2 4 .7
Л Д
Ю
12
фиеЗ
Редактор А.Маковская
Составитель Т.Пинчук Техред Л.Олийнык
Заказ 5525/13
Тираж 952Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л.Патай
| Схват манипуляционного робота | 1979 |
|
SU772844A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
