сл
с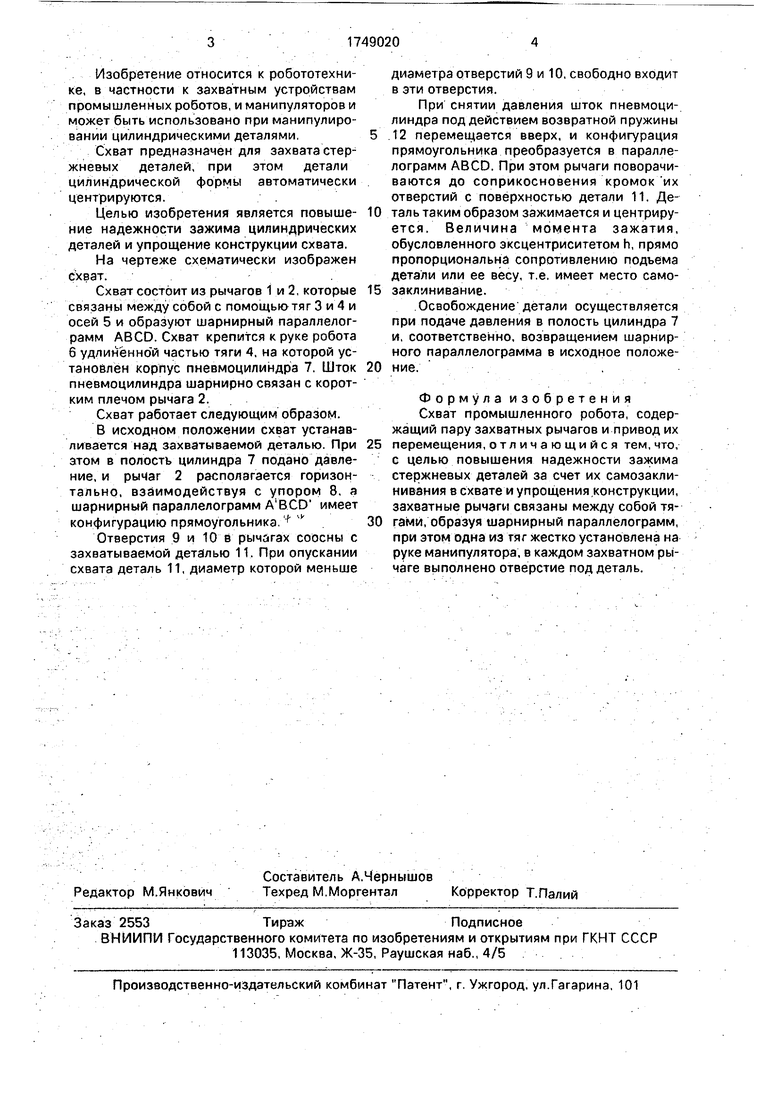
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1761463A1 |
| Кисть манипулятора | 1987 |
|
SU1421532A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
Изобретение относится к робототехнике, в частности к захватным устройствам промышленных роботов и манипуляторов. Целью изобретения является повышение надежности зажима детали за счет ее самозаклинивания в схвате и упрощение конструкции. Схват состоит из рычагов 1 и 2, связанных между собой тягами 3 и 4. Схват крепится к руке робота 6 тягой 4. Шток пнев- моцилиндра 7 шарнирно связан с рычагом 2. В каждом рычаге 1 и 2 выполнены отверстия 9 и 10, в которых располагается деталь 11. При подаче давления в полость пневмо- цилиндра 7 рычаг 2 устанавливается в горизонтальное положение, а деталь 11 вводится в отверстие 9 и 10. При снятии давления под действием пружины рычаги 1 и 2, поворачиваясь, заклинивают деталь 11 в отверстиях 9 и 10. 1 ил.
XI ч о ю о
Изобретение относится к робототехнике, в частности к захватным устройствам промышленных роботов, и манипуляторов и может быть использовано при манипулировании цилиндрическими деталями
Схват предназначен для захвата стержневых деталей, при этом детали цилиндрической формы автоматически центрируются.
Целью изобретения является повыше- ние надежности зажима цилиндрических деталей и упрощение конструкции схвата.
На чертеже схематически изображен схват.
Схват состоит из рычагов 1 и 2, которые связаны между собой с помощью тяг 3 и 4 и осей 5 и образуют шарнирный параллелограмм ABCD. Схват крепится к руке робота 6 удлиненно й частью тяги 4, на которой установлен корпус пневмоцилиндра 7. Шток пневмоцилиндра шарнирно связан с коротким плечом рычага 2.
Схват работает следующим образом.
В исходном положении схват устанавливается над захватываемой деталью При этом в полость цилиндра 7 подано давление, и рычаг 2 располагается горизонтально, взаимодействуя с упором 8, а шарнирный параллелограмм A BCD имеет конфигурацию прямоугольника
Отверстия 9 и 10 в рычагах соосны с захватываемой деталью 11. При опускании схвата деталь 11, диаметр которой меньше
диаметра отверстий 9 и 10, свободно входит в эти отверстия.
При снятии давления шток пневмоцилиндра под действием возвратной пружины 12 перемещается вверх, и конфигурация прямоугольника преобразуется в параллелограмм ABCD. При этом рычаги поворачиваются до соприкосновения кромок их отверстий с поверхностью детали 11. Деталь таким образом зажимается и центрируется. Величина момента зажатия, обусловленного эксцентриситетом h, прямо пропорциональна сопротивлению подъема детали или ее весу, т е. имеет место самозаклинивание.
Освобождение детали осуществляется при подаче давления в полость цилиндра 7 и, соответственно, возвращением шарнирного параллелограмма в исходное положение.
Формула изобретения Схват промышленного робота, содержащий пару захватных рычагов и привод их перемещения, отличающийся тем, что, с целью повышения надежности зажима стержневых деталей за счет их самозаклинивания в схвате и упрощения конструкции, захватные рычаги связаны между собой тягами, образуя шарнирный параллелограмм, при этом одна из тяг жестко установлена на руке манипулятора, в каждом захватном рычаге выполнено отверстие под деталь.
| Захват манипулятора | 1986 |
|
SU1380935A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
